Изобретение относится к автоматике, к устройствам, обеспечивающим выбор маршрута подвижного объекта и передвижение по этому маршруту этого объекта с остановками в заданных точках маршрута.
Целью изобретения является упрощение устройства.
На фиг.1 показана схема устройства.
Устройство содержит задатчик 1 курса - металлический стержень (труба, лента, уголок и т.п.), уложенный в полотно дороги на всем протяжении трассы с разрывами в соответствующих местах. Основные датчики 2 и 3 положения расположены на подвижном объекте и через размыкающие контакты 4 и 5 и переключающие контактные группы 6 и 7 подсоединены к входам блока 8 обработки информации и сумматора 9. Дополнительные датчики 10 и 11 расположены на подвижном объекте так, что основные датчики находятся между дополнительными. Выходы дополнительных датчиков через замыкающие контакты 12 и 13 соединены с входами блока обработки информации и сумматора, а через переключающие контактные группы - с выходами противоположных основных датчиков положения. Выход сумматора соединен с входом распределителя 14 импульсов, одни выходы которого через программируемые двухпозиционные ключи 15, 15'...15n подсоединены к входам первого элемента ИЛИ 16, выходы которого соединены с входом реле 17 времени. Другие выходы распределителя импульсов через первые выходы программируемых трехпозиционных ключевых элементов 18, 18'...18n соединены с входами второго элемента ИЛИ 19, выход которого соединен с входом первого коммутатора 20, а через вторые выходы программируемых трехпозиционных ключевых элементов - с входами третьего элемента ИЛИ 21, выход которого соединен с входом второго коммутатора 22. Выход сумматора может быть подключен к входу распределителя импульсов через формирователь 23 импульсов. При необходимости сброса питания при окончании маршрута вводится программируемый переключатель 24, выход которого подсоединен к блоку 25 сброса питания системы управления.
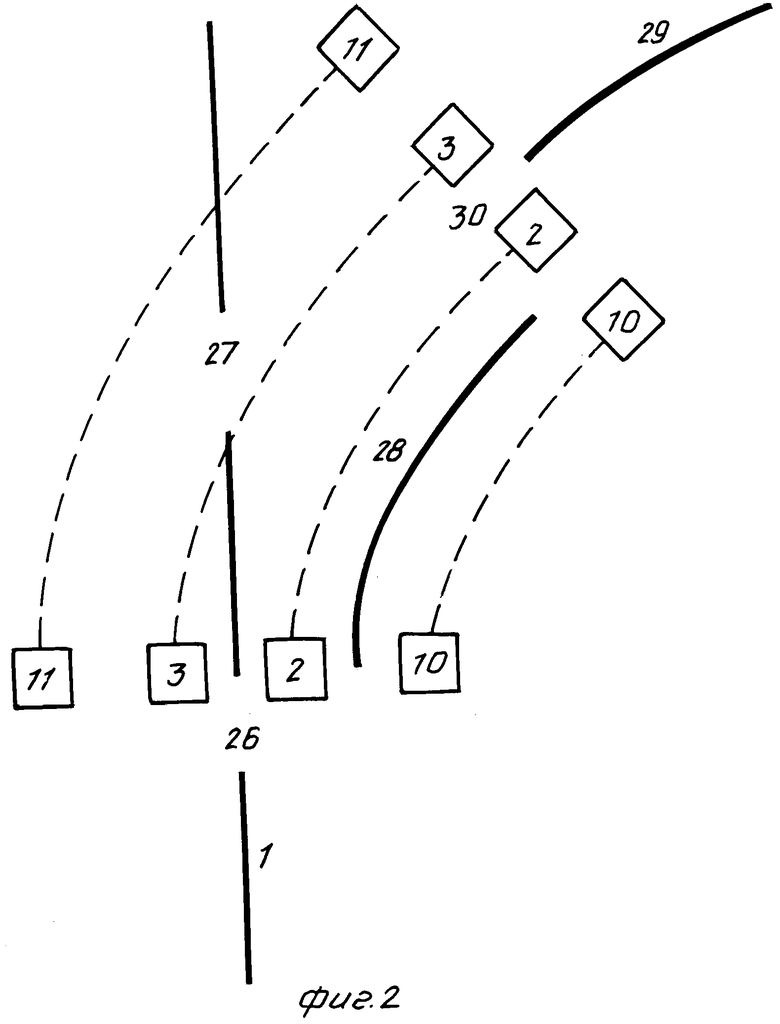
На фиг.2 изображена трасса, где задатчик 1 курса имеет разрывы 26, 27. Между разрывами 26 и 27 имеется ступенчатое ответвление задатчика курса, выполненное из отрезков 28 и 29 - ответвление вправо, которое имеет разрыв 30. Позициями 2 и 3 показано положение основных датчиков положения объекта, а 10 и 11 - дополнительных при выполнении поворота вправо транспортным средством, пунктиром - их траектории перемещения по ответвлению трассы.
Устройство функционирует следующим образом.
Транспортное средство располагается на полотне дороги так, чтобы задатчик 1 курса находился между датчиками 2 и 3 положения. При подаче питания на устройство управления датчики 2 и 3, взаимодействуя своим электромагнитным полем с задатчиком 1 курса, формируют на своем выходе сигналы, пропорциональные расстоянию до задатчика курса. Выходы датчиков 2 и 3 через размыкающие ключи 4 и 5 и переключающие контактные группы 6 и 7 соответственно подсоединены к входам блока 8 обработки сигналов, выход которого подсоединен к механизму управления транспортным средством (на фигурах не показан), а также к сумматору 9, с выхода которого сумма сигналов с датчиков положения подается на распределитель 14 импульсов, если установлен формирователь 23 импульсов, то через него. При этом распределитель импульсов устанавливается в нулевое положение. Перед началом движения транспортного средства определяется траектория его движения посредством установки программируемых ключей 18, определяющих на каком повороте по счету влево или вправо транспортное средство должно повернуть. Это происходит за счет того, что на сумматоре 9 выдается скачек напряжения в момент прохождения транспортным средством разрыва задатчика 1 курса, который подается с выхода сумматора на распределитель 14 импульсов. Предположим, что коммутатор 20 определяет поворот направо, а коммутатор 22 - налево. При установке ключа 18' в верхнее положение сигнал с выхода распределителя импульсов, появившийся после прохождения транспортным средством разрыва 26, проходит на коммутатор 20 через элемент ИЛИ 19. При этом коммутатор 20 подключает цепь выхода дополнительного датчика 10 ключом 12, который замыкается, к входу блока 8 обработки сигнала, а ключа 5 отключает датчик 3 от другого входа блока 8 обработки сигналов с датчиков. В то же время датчик 2 подсоединяется подвижным контактом контактной группы 6 к входу блока 8, от которого отсоединен датчик 3, так как пройдя разрыв 26 (см.фиг.2), транспортное средство наезжает на отрезок трассы 28, то датчик 2 и дополнительный датчик 10 начинают выдавать сигналы на блок 8, но уже относительно участка трассы (задатчика курса) 28. Транспортное средство начинает отрабатывать разворот вправо. При окончании участка 28 опять происходит разрыв 30 задатчика курса и коммутатор 20 возвращает ключи 4, 6 и 12 в исходное положение, так как распределитель импульсов снял выходной сигнал с элемента ИЛИ 19 через программируемый ключ 18, а транспортное средство при этом наехало на участок 29 задатчика курса, и опять блок 8 получает информацию от датчиков 2 и 3.
Таким же образом, но с участием дополнительного датчика 11 и основного датчика 3 получают поворот налево, если коммутатор 22 получит команду от распределителя 14 импульсов на срабатывание ключей 5, 7 и 13. Если ключи 18,18'. ..18n оставить в нейтральном положении, то распределитель импульсов считает разрывы задатчика 1 курса, но поворотов по ответвлениям направо или налево не происходит и транспортное средство перемещается по основному задатчику 1 курса. При необходимости остановки транспортного средства на какое-то время в определенном месте необходимо установить на определенном выходе распределителя 14 импульсов программируемый ключ 15...15n. Распределитель импульсов, считая разрывы, выдает в нужный момент команду на реле 17 времени через элемент ИЛИ 16, которое, в свою очередь, выдает на своем выходе команду на механизм останова транспортного средства на определенное время. При установке программируемого переключателя 24 в определенное положение на выбранный выход распределителя 14 импульсов, блок 25 отключения питания получает команду на останов транспортного средства путем отключения системы и механизма управления. Он может представлять собой реле. Устанавливается на объект не обязательно, т.е. останов может обеспечить через реле времени.
Реле времени может состоять из нескольких реле времени, входы которых могут быть подсоединены раздельно к выбранным выходам распределителя импульсов, обеспечивая разные по времени остановки на различных участках трассы. Коммутаторы 20 и 22 могут быть выполнены релейными. Формирователь 23 импульсов может отсутствовать при достаточной крутизне изменения выходного сигнала сумматора, представляя собой разделительный конденсатор. В другом случае он может представлять собой одновибратор с пороговым входом. Датчики 2, 3, 10, 11 положения могут представлять собой генераторы, индуктивность катушек которых изменяется от наличия в их электромагнитном поле металла. Датчики могут иметь выпрямители на своих выходах. Блок 8 может быть выполнен дифференциальным усилителем.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| Устройство для управления подвижным объектом | 1986 |
|
SU1411713A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 1998 |
|
RU2143334C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для адресования транспортного средства с электроприводом | 1983 |
|
SU1184767A1 |
| УСТРОЙСТВО ДЛЯ МАГНИТНО-ИМПУЛЬСНОЙ ОБРАБОТКИ РАСТЕНИЙ | 2014 |
|
RU2573349C1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Обучающее устройство | 1984 |
|
SU1249566A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ МАСТЕРСТВА ВОЖДЕНИЯ ОПЕРАТОРА БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1997 |
|
RU2123724C1 |
| Устройство для оценки мастерства вождения транспортных средств | 1989 |
|
SU1622889A1 |

Изобретение относится к автоматике, к устройствам, обеспечивающим формирование сигналов управления при выборе маршрута подвижным объектом, движущимся по пассивному задатчику курса, проложенному в полотне дороги с ответвлениями влево, вправо и с остановками на определенных местах. Цель изобретения - упрощение. Это достигается тем, что устройство содержит элементы ИЛИ, два коммутатора, группу программируемых переключателей и группу программируемых двухпозиционных ключей, при этом выходы дополнительных датчиков положения соединены с входами сумматора и блока обработки сигналов через замыкающие ключевые элементы соответствующих коммутаторов, выходы основных датчиков положения объединены с выходами своих дополнительных датчиков положения через последовательно соединенные размыкающие и первые переключающие ключевые элементы соответствующих коммутаторов, а с выходами противоположных дополнительных датчиков положения через вторые переключающие ключевые элементы соответствующих коммутаторов, выход сумматора соединен с входом распределителя импульсов, выходы которого через последовательно соединенные группу программируемых двухпозиционных ключей и первый элемент ИЛИ соединены с входом реле времени и, кроме того, выходы распределителя импульсов соединены с входами группы программируемых переключателей, первые выходы которых объединены через второй элемент ИЛИ с управляющим входом первого коммутатора, а вторые выходы - через третий элемент ИЛИ с управляющим входом второго коммутатора. 2 ил.
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ, содержащее размещенные на подвижном объекте два основных и два дополнительных датчика положения, задатчик курса, выполненный в виде металлического стержня, размещенного между основными датчиками положения, которые размещены между дополнительными датчиками положения, блок обработки сигналов выход которого является выходом устройства, сумматор, распределитель импульсов и реле времени, отличающееся тем, что, с целью упрощения устройства, оно содержит элементы ИЛИ, два коммутатора, группу программируемых переключателей и группу программируемых двухпозиционных ключей, при этом выходы дополнительных датчиков положения соединены с входами сумматора и блока обработки сигналов через замыкающие ключевые элементы соответствующих коммутаторов, выходы основных датчиков положения объединены с выходами соответствующих дополнительных датчиков положения через последовательно соединенные размыкающие и первые переключающие ключевые элементы соответствующих коммутаторов, а с выходами противоположных дополнительных датчиков положения - через вторые переключающие ключевые элементы соответствующих коммутаторов, выход сумматора соединен с входом распределителя импульсов, выходы которого через последовательно соединенные группу программируемых двухпозиционных ключей и первый элемент ИЛИ соединены с входом реле времени и, кроме того, выходы распределителя импульсов соединены с входами группы программируемых переключателей, первые выходы которых объединены через второй элемент ИЛИ с управляющим входом первого коммутатора, а вторые выходы через третий элемент ИЛИ - с управляющим входом второго коммутатора.
| Система для управления выбором маршрута автоматически движущимся транспортным средством | 1980 |
|
SU945031A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
