Изобретение относится к промысловой геофизике и может быть использовано для определения наклона скважин и положения отклонителя бурового инструмента.
Известен способ определения зенитных и визирных углов, реализованный в устройстве [1], включающий установку в корпусе преобразователя трех взаимно ортогональных маятников с датчиками угловых перемещений (ДУП), причем ось вращения третьего маятника ориентирует по продольной оси корпуса, измерение сигналов с ДУП и определение зенитных и визирных углов по измеренным сигналам [1].
Известен также способ определения зенитных и визирных углов, реализованный в устройстве [2], включающий установку в корпусе преобразователя трех взаимно ортогональных маятников с ДУП, причем ось вращения третьего маятника ориентируют по продольной оси корпуса измерение сигналов с ДУП, селективный выбор сигналов с двух ДУП из трех в дискретизованных диапазонах измерения и определение зенитных и визирных углов по измеренным сигналам [2].
Недостатки аналогов следующие. Определение зенитных и визирных углов осуществляют без учета угловых параметров, обуславливающих инструментальные погрешности, что приводит к большим погрешностям измерений.
Наиболее близким по технической сущности и достигаемому результату является способ определения зенитных и визирных углов, реализованный в устройстве [3], включающий установку в корпусе преобразователя трех ортогональных маятников с датчиками угловых перемещений (ДУП), измерение сигналов с ДУП, селективный выбор сигналов и определение зенитных и визирных углов по измеренным сигналам в дискретизованных диапазонах [3].
Недостаток прототипа: определение зенитных и визирных углов по измеренным сигналам осуществляют с низкой точностью, поскольку при обработке результатов измерения не учитывают угловые параметры отклонений осей вращения маятников от осей ортонормированного базиса (прямоугольной системы координат), связанного с корпусом преобразователя.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности определения зенитных и визирных углов путем учета угловых параметров, обуславливающих инструментальные погрешности.
Поставленная задача достигается тем, что в способе определения зенитных и визирных углов, реализованном в устройстве [3], включающем установку в корпусе преобразователя трех ортогональных маятников с датчиками угловых перемещений, причем ось вращения третьего маятника совпадает с продольной осью корпуса, измерение сигналов с датчиков, селективный выбор сигналов и определение зенитных и визирных углов по измеренным сигналам в дискретизованных диапазонах, априорно измеряют параметры σ и ρ - углы неортогональной установки первого маятника по отношению к базису корпуса соответственно в плоскостях OXY и OXZ, параметр γ - угол неортогональной установки второго маятника по отношению к базису корпуса в плоскости OYZ, параметры ε и λ - углы неортогональной установки третьего маятника по отношению к базису корпуса соответственно в плоскостях OXZ и OYZ, а зенитные θ и визирные ϕ углы в дискретизованных диапазонах определяют по измеренным сигналам с датчиков угловых перемещений βi (i=1,2,3) и параметрам σ, ρ, γ, ε и λ следующим образом:
- для небольших углов наклона ( θ ≤45o)

- для больших углов наклона ( θ >45o)
в диапазонах ϕ 0oC45o, 135o oC225o, 315oC360o
в диапазонах ϕ 45o oC135o, 225o oC315o
Пример конкретного выполнения способа. На рис. 1 представлена схема реализации предложенного способа. Преобразователь содержит корпус 1, три маятника 2, 3 и 4, на осях вращения которых установлены датчики угловых перемещений (ДУП) 5, 6 и 7, управляемый коммутатор (УК) 8, фазочувствительный детектор (ФЧД) 9, аналого-цифровой преобразователь (АЦП) 10, интерфейс 11, вычислительное устройство (ВУ) 12 и блок управления 13. Работа преобразователя заключается в следующем. При отклонении корпуса 1 от вертикали на зенитный угол θ и повороте вокруг собственной продольной оси на визирный угол ϕ маятники 2, 3 и 4 под действием устанавливающих моментов ориентируются по вектору силы тяжести. При этом с ДУП 5, 6 и 7 сигналы, пропорциональные углам поворота маятников, соответственно β1, β2 и β3 через УК 8 поступают на вход ФЧД 9. После детектирования сигналы в АЦП 10 преобразуются в цифровые коды Qi (i=1,2,3) и через интерфейс 11 поступают в ВУ 12. БУ 13 отрабатывает управляющие команды на УК 8, ФЧД 9, АЦП 10 и интерфейс 11.
В идеальном случае оси вращения маятников 2, 3 и 4 совпадают с направлением осей ортонормируемого базиса (прямоугольной системы координат) OXYZ корпуса 1. При этом уравнения связи углов поворота маятников βi (i=1,2,3) с определяемыми углами θ и ϕ имеют вид
При конструировании, изготовлении деталей и сборке преобразователя неизбежно возникают отклонения, характеризуемые точностью технологических процессов в пределах полей допусков, в результате чего оси вращения маятников 2, 3, 4 ориентируются неортогонально друг к другу со следующими параметрами: σ и ρ - углы отклонения оси вращения первого маятника 2 от оси OX базиса корпуса OXYZ соответственно в плоскостях OXY и OXZ; γ - угол отклонения оси вращения второго маятника 3 от оси OY базиса корпуса OXYZ в плоскости OYZ;
ε и λ - углы отклонения оси вращения третьего маятника 4 от оси OZ базиса корпуса OXYZ соответственно в плоскостях OXZ и OYZ. При этом уравнения связи с учетом данных углов отклонения осей вращения маятников 2, 3 и 4 от осей базиса OXYZ корпуса 1 примут следующий вид: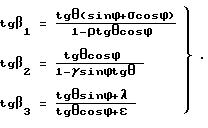
Угловые параметры σ, ρ, γ, ε и λ определяют априорно опытным путем и в качестве констант, характеризующих конкретное конструктивное исполнение преобразователя, вводят в ВУ 12, в котором зенитный θ и визирный ϕ углы определяют по измеренным сигналам с ДУП βi/ (i=1,2,3) с учетом констант σ, ρ, γ, ε и λ следующим образом:
- при небольших углах наклона ( θ ≤45o)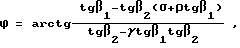

- при больших углах наклона ( θ >45o)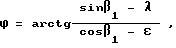
в диапазонах ϕ 0oC45o, 135o oC225o, 315o oC360o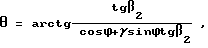
в диапазонах ϕ 45o oC135o, 225o oC315o
Итак, заявляемое изобретение позволяет повысить точность определения зенитных θ и визирных ϕ углов путем априорного экспериментального определения угловых параметров σ, ρ, γ, ε и λ, обуславливающих инструментальные погрешности, и дальнейшего учета при обработке результатов измерений.
Источники информации:
1. Авторское свидетельство СССР N 1086139, кл. E 21 B 47/02, 1984.
2. Авторское свидетельство СССР N 1153050, кл. E 21 B 47/02, 1985.
2. Авторское свидетельство СССР N 1328497, кл. E 21 B 47/02, 1987 (прототип).
Способ определения зенитных и визирных углов используется для определения наклона скважин и положения отклонения бурового инструмента. В корпусе преобразователя устанавливают три ортогональных маятника с датчиками угловых перемещений. Ось вращения третьего маятника ориентируют по продольной оси корпуса, а приорно измеряют параметры σ и ρ- углы неортогональной установки первого маятника по отношению к базису корпуса соответственно в плоскостях ОХY и OXZ , параметр γ - угол неортогональной установки второго маятника по отношению к базису корпуса в плоскости OYZ , параметры ε и λ - углы неортогональной установки третьего маятника по отношению к базису корпуса соответственно в плоскостях OXZ и OYZ, а зенитные θ и визирные ϕ углы в дискретизованных диапазонах определяют по измеренным сигналам с датчиков угловых перемещений βi (i= l, 2,3) и параметрам σ, ρ, γ, ε и λ из соответствующих математических выражений для различных зенитных углов наклона θ ≤45° или θ ≥ 45° и различных диапазонов визирных углов ϕ. Учет угловых параметров, обуславливающих инструментальные погрешности, повышает точность определения зенитных и визирных углов. 1 ил.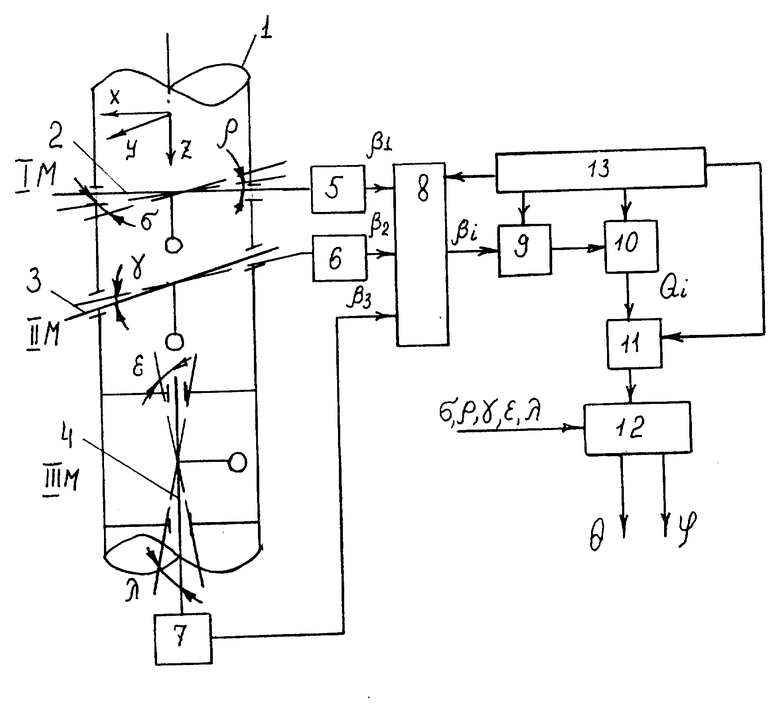
Способ определения зенитных и визирных углов, включающий установку в корпусе преобразователя трех ортогональных маятников с датчиками угловых перемещений, причем ось вращения третьего маятника ориентируют по продольной оси корпуса, измерение сигналов с датчиков, селективный выбор сигналов и определение зенитных и визирных углов по измеренным сигналам в дискретизованных диапазонах, отличающийся тем, что априорно измеряют параметры σ и ρ - углы неортогональной установки первого маятника по отношению к базису корпуса соответственно в плоскостях OXY и OXZ, параметр γ - угол неортогональной установки второго маятника по отношению к базису корпуса в плоскости OYZ, параметры ε и λ - углы неортогональной установки третьего маятника по отношению к базису корпуса соответственно в плоскостях OXZ и OYZ, зенитные θ и визирные ϕ углы в дискретизованных диапазонах определяют по измеренным сигналам с датчиков угловых перемещений βi (i = 1, 2, 3) и параметрам σ, ρ, γ, ε и λ следующим образом:
- для небольших углов наклона (θ≤45o)

- для больших углов наклона (θ>45o).и
| Преобразователь наклона скважины и угла установки отклонителя бурового инструмента | 1986 |
|
SU1328497A2 |
| Способ определения азимута искривления траектории скважины | 1988 |
|
SU1555470A1 |
| Способ определения пространственного положения скважинного снаряда | 1989 |
|
SU1701901A1 |
| RU 2004786 C1, 15.12.93 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1991 |
|
RU2030574C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТА В ТОЧКЕ ОСТАНОВА | 1993 |
|
RU2062872C1 |
| US 4163324 A, 08.07.79 | |||
| US 4682421 A, 28.07.87 | |||
| US 4709486 A, 12.01.87 | |||
| US 4999920 A, 05.12.91 | |||
| САМОЛЕТ С ПЛОСКИМ ХВОСТОВЫМ ОПЕРЕНИЕМ | 2002 |
|
RU2220072C1 |
| DE 3135743 A, 19.05.82. | |||
