Изобретение относится к промысловой геофизике и может быть использовано при определении наклона скважины, положения отклонения бурового инструмента и азимута.
Известен способ (см. RU 2121574 С1, кл. Е 21 В 47/02, 10.11.1998) определения корректировки зенитных и визирных углов, основанный на измерении величины сигналов с 3-х ортогональных датчиков угловых перемещений, установленных на маятниках, причем ось вращения третьего маятника ориентирована по продольной оси корпуса, априорно измеряют параметры τ и р - углы неортогональной установки первого маятника по отношению к базису корпуса соответственно в плоскостях OXY и OXZ, параметр γ - угол неортогональной установки второго маятника по отношению к базису корпуса в плоскости OYZ параметры ε и λ - углы неортогональной установки третьего маятника по отношению к базису корпуса соответственно в плоскостях OXZ и OYZ, занимаемые Q и визирные Ψ углы в дискретизованных диапазонах определяют по измеренным сигналам с датчиков угловых перемещений β i (I=1,2,3) и параметрами δ , ρ , γ , ε , λ следующим образом:
для небольших углов наклона (9<45° )

для больших углов наклона (θ >45° )

Недостатком этого способа является отсутствие аппарата определения углов неортогональной установки маятников по отношению к базису корпуса в соответствующих плоскостях.
Известен способ корректировки измерения ускорения точки (см. кн.: Вибрация в технике, т. 5./Под ред. М.Д.Генкина, М., Машиностроение, 1981 г., с.166) трехкомпонентным акселерометром с определением погрешности измерения, вызванной с несовпадением векторов чувствительности датчика с измерительными осями датчика.
В этом способе результаты измерения ускорения точки 3-х компонентным датчиком представляются в следующем виде:
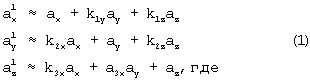
a
а
a
axyz - истинные ускорения по осям X, Y, Z,
Kij - коэффициент относительной поперечной чувствительности датчика вдоль осей X,Y,Z (i=1,2,3 j=x у z).
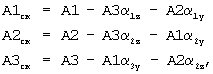
Коэффициенты kij определяются как отношение вектора чувствительности акселерометра но поперечной оси к вектору основной чувствительности датчика. Оценка погрешности такого трехкомпонентного акселерометра описывается уравнениями

где α
В описанном способе указывается, что коэффициент kij определяется на поворотном столе, который допускает повороты по двум перпендикулярным осям. Недостатком этого способа является априорность выбора модели ошибок от неперпендикулярности осей чувствительности трехкомпонентного акселерометра, что значительно снижает точность коррекции измерения.
Наиболее близким техническим решением к заявленному является опубликованная заявка №2001-115577/03(016596) с положительным решением от 13.06.02. Способ коррекции определения углов направления скважины основан на коррекции измерений напряженности поля тремя ортогональными измерителями поля, ось чувствительности одного из них ориентируют по продольной оси прибора.
Способ заключается в том, что поочередно вращают корпус прибора относительно одной из трех взаимно ортогональных осей, каждая из которых должна совпадать с осью чувствительности измерителя напряженности и направлена ортогонально направлению напряженности поля, определяют максимальные и минимальные значения сигналов с поочередно вращающихся измерителей напряженности поля в корпусе прибора и углы поворота вокруг оси вращения, соответствующие этим значениям. По этим величинам определяют погрешность измерения, обусловленную неортогональностью установки в приборе измерителей напряженности поля и корректируют их первичные сигналы
Аiскор=Aiнеск-Аiкор, где
Аiскор - скорректированная величина первичного сигнала измерителя напряженности поля,
Аiнеск – не скорректированная величина первичного сигнала измерителя напряженности поля,
Аiкор - величина сигнала коррекции

здесь Аimax и Aimin - максимальная и минимальная величины сигналов измерителя напряженности поля при вращении вокруг своей оси,
ϕ 1 - угол поворота вокруг оси вращения,
φ io - угол поворота вокруг оси вращения, соответствующий величине сигнала измерителя напряженности поля Aimax.
Недостатком этого способа является большая трудоемкость из-за длительности операций вращения вокруг каждой из осей и необходимости фиксации большого числа точек при определении Аmax и Аmin, а также неточность определения углов ϕ из-за того, что они определяются при не откорректированных значениях показаний измерителей напряженности поля.
Целью заявленного способа является оптимизация операции по определению коррекции сигналов измерителей напряженности поля, а также повышение точности коррекции.
Поставленная цель достигается тем, что в способе коррекции определения углов направления скважины, включающем установку в корпус скважинною прибора трех взаимно ортогональных измерителей напряженности поля, замер первичных значений сигналов измерителей напряженности поля в определенных положениях скважинного прибора относительно направления максимальной напряженности поля, определение по этим сигналам погрешности измерителей напряженности поля, обусловленной неортогональностью измерителей напряженности поля, коррекцию их первичных сигналов, по которым вычисляют углы направления скважины, скважинный прибор устанавливают его продольной осью Z по направлению максимальной напряженности поля и измеряют значения сигналов всех измерителей, затем скважинный прибор устанавливают его продольной осью Z горизонтально и перпендикулярно направлению максимальной напряженности поля, таким образом, чтобы значение сигнала измерителя напряженности поля по одной из двух других осей было равно нулю, и измеряют значения сигналов всех измерителей напряженности поля, поворачивают скважинный прибор относительно продольной его оси на 90° и измеряют значения сигналов всех измерителей напряженности поля, затем по формулам

где α ι j - углы неортогональности между осью чувствительности измерителя напряженности с соответствующими номерами i=1,2,3 скважинного прибора и направлением, перпендикулярным к направлению максимальной величины напряженности поля, а индекс j=X,Y,Z показывает направление максимальной величины напряженности поля,
A11, A21 - показания измерителей 1 и 2 напряженности поля в положении скважинного прибора, продольная ось которого расположена по направлению максимальной напряженности поля.
А12, А32 - показания измерителей 1 и 3 напряженности поля в положении скважинного прибора, продольная ось которого расположена горизонтально и перпендикулярно направлению максимальной напряженности поля, при этом показание А12, например, равно 0,
А23, А33 - показания измерителей 2 и 3 напряженности поля в положении скважинного прибора, продольная ось которого расположена горизонтально и перпендикулярно направлению максимальной напряженности поля и повернута на 90° относительно продольной оси скважинного прибора от предыдущего положения,
А10=А20=A30=К - показания измерителей 1,2,3 напряженности поля в положениях, когда ось их чувствительности установлена по направлению максимальной величины напряженности поля (для гравитационного поля, например, K=g - ускорению свободного падения),
вычисляют углы неортогональности осей, с учетом которых в произвольном положении скважинного прибора определяют скорректированные показания измерителей напряженности поля по формулам
где А1ск, А2ск, А3ск - текущие скорректированные показания измерителей 1,2,3 напряженности поля,
А1, А2, А3 - текущие не скорректированные показания измерителей 1,2,3 напряженности поля.
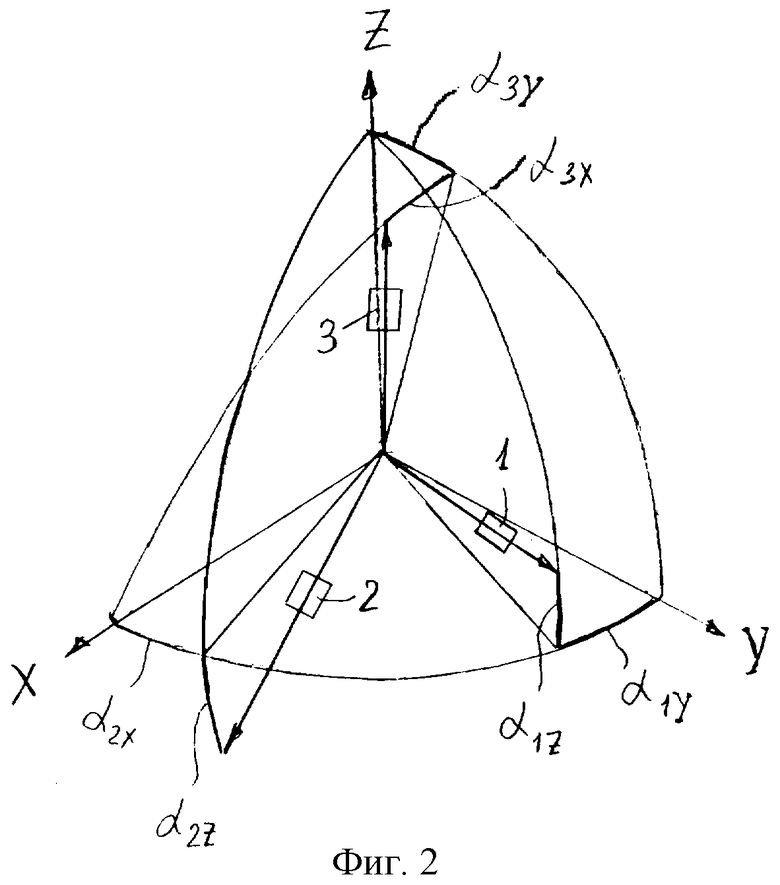
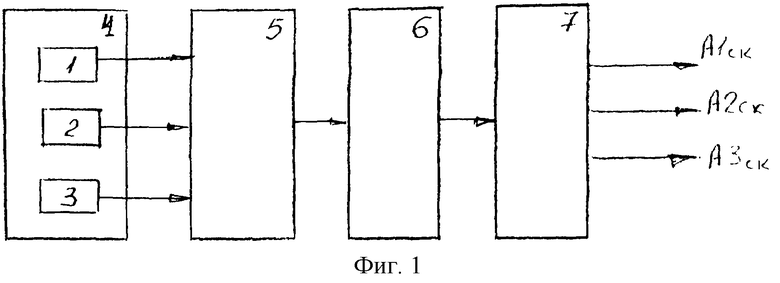
Сущность предлагаемого способа поясняется чертежами, где на фиг.1 показана структурная схема устройства, реализующего заявленный способ, на фиг.2 изображены направления осей чувствительности измерителей по отношению к осям скважинного прибора.
Устройство содержит три измерителя 1, 2, 3 (например, акселерометры), установленные в корпусе прибора 4. Измерители 1, 2 и 3 подключены через последовательно соединенные коммутатор 5 и аналого-цифровой преобразователь (АЦП) 6 с вычислительным блоком 7.
Первичные значения сигналов A1, A2, A3 с измерителей 1, 2 и 3 поступают на коммутатор 5, который подключает их поочередно ко входу АЦП 6. С выхода АЦП 6, в цифровом виде сигналы поступают в вычислительный блок 7, где по заложенным в него алгоритмам производятся коррекция сигналов, вычисление углов направления скважины и траектории ствола скважины. Сигналы, необходимые для коррекции каждого измерителя, определяются следующим образом.
В примере реализации заявленного способа в качестве измерителей используются измерители напряженности гравитационного поля - акселерометры. Все результаты распространены также на измерители напряженности магнитного поля Земли - магнетометры и измерители угловой скорости Земли - датчики угловой скорости.
Х, Y, Z оси скважинного прибора 4 (см. фиг.2). Ось Z направлена по продольной оси скважинного прибора 4. Так как измерители 1, 2, 3 (акселерометры) установлены с некоторыми перекосами осей чувствительности измерителей по отношению к осям X, Y, Z в корпусе скважинного прибора 4, то они будут измерять необходимые сигналы с погрешностями, зависящими от углов α ij. Т.е. если скважинный прибор 4 установить вертикально (ось Z вертикальна), то выходные сигналы измерителей 1 и 2 (акселерометров) должны быть равны нулю. Однако из-за углов α 1z и α 2z выходные сигналы с измерителей 1 и 2 не будут равны нулю, а будут равны некоторым величинам, пропорциональным этим углам (считаем эти углы малыми). Аналогично имеем погрешности и для других осей.
Общие уравнения, связывающие выходные сигналы измерителей 1, 2 и 3 напряженности поля с истинными значениями напряженности поля в этой точке, следующие:

А1, А2, А3 - текущие показания измерителей 1,2,3 напряженности поля,
А1и, А2и, А3и - истинные значения напряженности поля по осям X, Y, Z,
α i, j - углы неортогональности между осью чувствительности измерителя напряженности с соответствующим номером, i=1, 2, 3 скважинного прибора и перпендикуляром к направлению максимальной величины напряженности, а j=-X,Y,Z показывает направление максимальной величины напряженности поля.
Уравнения (2) аналогичны с уравнениями (1) с учетом вышеизложенных замечаний. В самом общем виде они могут быть получены из уравнений преобразований координат Эйлера-Крылова с условием, что углы α ij малы и для каждой оси они различны.
Данные углы могут быть найдены следующим образом (см. фиг.2).
1. Корпус скважинного прибора 4 устанавливается вертикально (ось Z вертикальна), измеряются выходные сигналы измерителей 1, 2, 3 (акселерометров), тогда уравнения (2) могут быть записаны:
A11=A30α 1z, A21=А30α 2z, A31=А30, где
A11, А21, A31 - показания измерителей (акселерометров) по осям X, Y, Z соответственно.
А30 - истинное значение напряженности поля, равное g.
Тогда 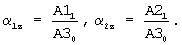
2. Корпус скважинного прибора 4 устанавливается горизонтально так, чтобы ось Z была горизонтальна, а измеритель (акселерометр) напряженности 1 по оси Х показывал минимальный сигнал ≈ 0. Измеряются выходные сигналы измерителей 1, 2, 3 (акселерометров). Тогда уравнения (2) могут быть записаны
A12=A20α 1у, А22=А20, А32=А20α3у,
где А12, A22, А32 - показания измерителей 1, 2, 3 (акселерометров) по осям X, Y, Z соответственно,
А20 - истинное значение напряженности поля, равное g.
Тогда 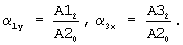
3. Корпус скважинного прибора 4 поворачивают вокруг оси Z на 90° и измеряют выходные сигналы измерителей 1, 2, 3 (акселерометров). Тогда уравнения (2) могут быть
А13=А10
А23=А10α 2х
А33=А10α 3х, где
А13, А23, А33 - показания измерителей 1, 2, 3 (акселерометров) по осям X, Y, Z соответственно,
А10 - истинное значение напряженности поля g.
Тогда 
Еще раз следует подчеркнуть, что указанное определение углов возможно при условии их малости, т.е. sinα =α , cosα =1, что в реальных скважинных приборах соответствует действительности.
Для определения скорректированных значений напряженности поля по осям X,Y,Z в произвольном положении скважинного прибора 4 необходимо решить уравнение (2) относительно А1и, А2и, А3и, считая α ij известными величинами.
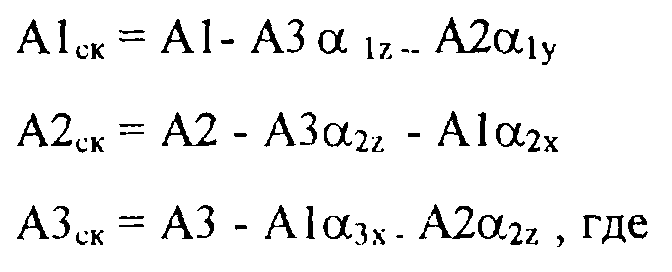
Такое решение имеет вид (членами уравнения с произведениями углов ввиду их малости пренебрегаем), и принимаем А1и≈ А1ск, А2и≈ А2ск, А3и≈ А3ск
А1ск=А1-А31z-A2α 1y
А2ск=А2-А32z-A1α 2x
А3ск=А3-А13z-A2α 2x, где
A1, A2, A3 - текущие не скорректированные показания измерителей 1, 2, 3 напряженности поля.
А1ск, А2ск, А3ск - текущие скорректированные показания измерителей 1, 2, 3 напряженности поля.
Таким образом, предложенный способ обладает большими преимуществами по сравнению с известными, т.к. уменьшает число операций, упрощает их при определении коррекции выходных сигналов измерителей напряженности поля и повышает точность коррекции из-за упрощения алгоритма.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ НАПРАВЛЕНИЯ СКВАЖИНЫ | 2001 |
|
RU2198291C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ СКВАЖИНЫ | 2001 |
|
RU2206737C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2784859C1 |
| ПРОСТРАНСТВЕННЫЙ АКСЕЛЕРОМЕТР С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1994 |
|
RU2082173C1 |
| Способ повышения точности калибровки блока микромеханических датчиков угловой скорости | 2019 |
|
RU2727344C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| Способ измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами | 2021 |
|
RU2766833C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ РАЗОРИЕНТАЦИИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ АКСЕЛЕРОМЕТРОВ БЛОКА ИНЕРЦИАЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2024 |
|
RU2839565C1 |
Изобретение относится к промысловой геофизике и может быть использовано при определении наклона скважины, положения отклонения бурового инструмента и азимута. Техническим результатом изобретения является оптимизация операций по определению коррекции сигналов измерителей напряженности поля, а также повышение точности коррекции. Способ включает в себя определение углов неортогональности осей чувствительности измерителей напряженности поля относительно осей скважинного прибора за минимальное число операций. При этом учитывается, что оси скважинного прибора внешне конструктивно неоформлены. С помощью этих углов определяют скорректированные значения текущих измерений напряженности поля для определения наклона скважины, положения бурового инструмента и азимута в процессе бурения. 2 ил.
Способ коррекции определения углов направления скважины, включающий установку в корпус скважинного прибора трех взаимно ортогональных измерителей напряженности поля, ось чувствительности одного из них совпадает с продольной осью прибора, замер первичных сигналов измерителей напряженности поля в определенных положениях скважинного прибора относительно направления максимальной напряженности поля, определение по этим сигналам погрешности измерителей напряженности поля, обусловленной неортогональностью измерителей напряженности поля, коррекцию их первичных сигналов, по которым вычисляют углы направления скважины, отличающийся тем, что скважинный прибор устанавливают его продольной осью Z по направлению максимальной напряженности поля и измеряют значения сигналов всех измерителей, затем скважинный прибор устанавливают его продольной осью Z горизонтально и перпендикулярно направлению максимальной напряженности поля, таким образом, чтобы значение сигнала измерителя напряженности поля по одной из двух других осей было равно нулю и измеряют значения сигналов всех измерителей напряженности поля, поворачивают скважинный прибор относительно продольной его оси на 90° и измеряют значения сигналов всех измерителей напряженности поля, затем по формулам

где αιj - углы неортогональности между осью с соответствующим номером ι=1, 2, 3 скважинного прибора и направлением, перпендикулярным к направлению максимальной величины напряженности поля, а индекс j=X,Y,Z показывает направление максимальной величины напряженности поля,
A11, A21 - показания измерителей 1 и 2 напряженности поля в положении скважинного прибора, продольная ось которого расположена по направлению максимальной напряженности поля,
A12, А32 - показания измерителей 1 и 3 напряженности поля в положении скважинного прибора, продольная ось которого расположена горизонтально и перпендикулярно направлению максимальной напряженности поля, при этом показания A12, например, равно нулю,
А23, А33 - показания измерителей 2 и 3 напряженности поля в положении скважинного прибора, продольная ось которого расположена горизонтально и перпендикулярно направлению максимальной напряженности поля и повернута на 90° относительно продольной оси скважинного прибора от предыдущего положения,
А10=А20=A30=К - показания измерителей 1, 2, 3 напряженности поля в положениях, когда ось их чувствительности установлена по направлению максимальной величины напряженности поля (для гравитационного поля, например, K=g - ускорению свободного падения),
вычисляют углы неортогональности осей, с учетом которых в произвольном положении скважинного прибора определяют скорректированные показания измерителей напряженности поля по формулам
А1ск, А2ск, А3ск - текущие скорректированные показания измерителей 1, 2, 3 напряженности поля,
A1, A2, A3 - текущие нескорректированные показания измерителей 1, 2, 3 напряженности поля.
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ НАПРАВЛЕНИЯ СКВАЖИНЫ | 2001 |
|
RU2198291C1 |

