Изобретение относится к электротехнике и может быть использовано для дистанционного управления стационарным преобразователем частоты (ПЧ), от которого питаются по троллеям электроприводы (ЭП) перемещающегося механизма, например кран-балки.
Известен способ дистанционного управления кран-балкой с пола с помощью кнопочной станции по кабелю, связывающему ее с релейно-контакторной аппаратурой, установленной на кран-балке [1].
Однако использование кабельной связи для дистанционного управления стационарным источником питания кран-балки с целью изменения частоты и напряжения затруднено, так как кнопочная станция перемещается вместе с кран-балкой. Установка ПЧ на кран-балке для регулирования частоты вращения ЭП кран-балки невозможна из-за значительных веса и габаритов ПЧ.
Известен также способ дистанционного управления без вспомогательных проводов и с использованием проводов линии электропередачи, применяемый в электроэнергетике, отличающийся тем, что одну из фаз трехфазной сети в пункте управления заземляют по выбранному коду при посредстве того или иного устройства и создаваемые при этом изменения напряжения фаз данной линии по отношению к земле или возникновение электрических величин нулевой или обратной последовательности используют для приведения в действие приемных аппаратов [2] . Недостатком указанного способа является его релейный характер воздействия на управляемый объект, что приводит к неблагоприятным переходным процессам в ЭП, выполненном по системе преобразователь частоты - асинхронный двигатель (ПЧ-АД), сопровождающимся бросками тока и перенапряжениями в преобразовательной части ЭП, а также ухудшает регулировочные и динамические качества ЭП.
Целью изобретения является повышение точности управления путем обеспечения плавного регулирования питающего напряжения и частоты на объекте управления.
Сущность изобретения заключается в том, что вместо периодического замыкания фазы на землю по выбранному коду и детектирования тока нулевой последовательности в сети на объекте управления изменяют величину сопротивления, постоянно включенного между одной из фаз и землей, и формируют сигнал управления частотой и напряжением ПЧ в виде разницы между сигналом уставки и сигналом обратной связи по току нулевой последовательности, измеренному в сети, переходя таким образом от релейного управления к непрерывному.
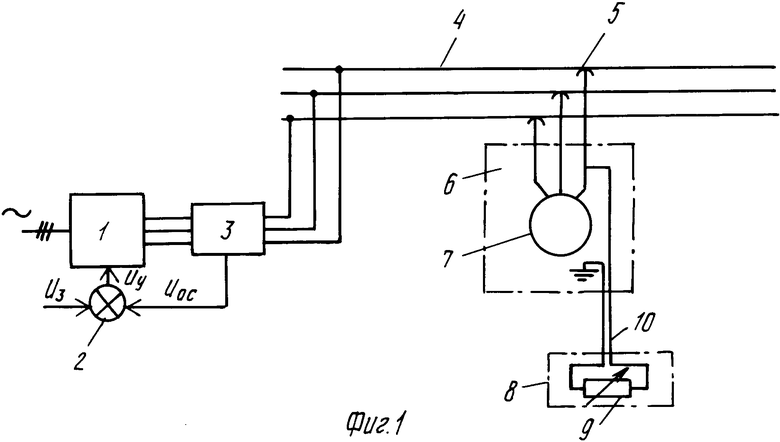
На фиг. 1 приведена схема реализации предложенного способа, где: 1 - преобразователь частоты, 2 - узел сравнения, 3 - датчик тока нулевой последовательности, 4 - троллеи, 5 - токосъемы, 6 - кран-балка, 7 - электродвигатель, 8 - пульт управления, 9 - переменное сопротивление, 10 - кабель.
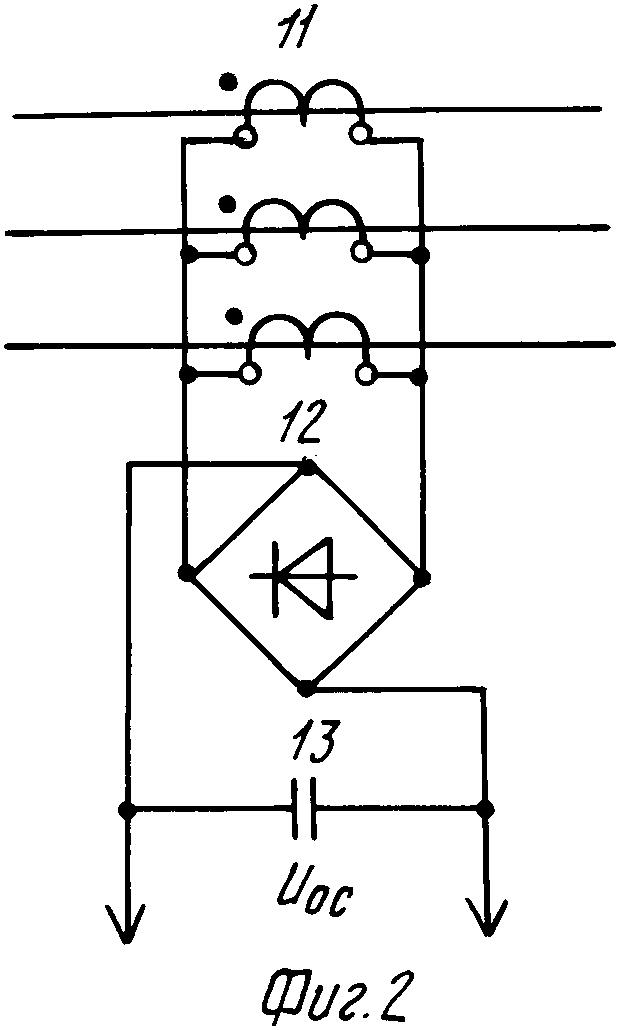
На фиг. 2 приведен пример реализации датчика тока нулевой последовательности.
На фиг.1 изображен условно только один электродвигатель 7, относящийся, например, к ЭП передвижения кран-балки. ЭП механизмов подъема, тельфера и передвижения кран-балки работают порознь, поочередно подключаясь к ПЧ 1 через токосъемы 5, скользящие по троллеям 4.
Переключение ЭП кран-балки осуществляют с помощью релейно-контакторной аппаратуры (условно не показанной на фиг.1), расположенной на кран-балке, по команде с пульта 8 управления. На пульте 8 управления установлено переменное сопротивление 9, включенное между одной из фаз и землей. Ток IN через это сопротивление пропорционален току нулевой последовательности и равен:
IN=  ,
,  =
= +
+ +
+ =3
=3 , где Uф - фазное напряжение;
, где Uф - фазное напряжение;
R - величина сопротивления переменного резистора, ,
,  ,
,  - линейные токи сети;
- линейные токи сети; - ток нулевой последовательности.
- ток нулевой последовательности.
Сигнал обратной связи Uос пропорциональный IN, формируемый датчиком 3 тока нулевой последовательности, подается на узел 2 сравнения, на который подан также сигнал уставки или задания Uз. На общий вход управления частотой и напряжением ПЧ подается сигнал Uy=Uз-Uос.
Таким образом ПЧ работает как система автоматического управления, поддерживая постоянство тока IN, т.е. автоматически изменяя напряжение выхода пропорционально изменению R, которое осуществляет оператор. Функциональная связь между частотой и напряжением ПЧ определяется системой управления ПЧ и может быть, в частности, линейной, соответствующей закону:  = const. Датчик тока IN устанавливается на участке между выходом ПЧ и троллеями, или на входе ПЧ. Его основой (см.фиг.2) является фильтр нулевой последовательности, состоящий из трех трансформаторов 11 тока, включенных в линии, вторичные обмотки которых соединены параллельно и имеют на выходе выпрямитель 12 и емкостный фильтр 13, уменьшающий влияние помех на работу ПЧ. При наличии у ПЧ согласующего трансформатора нулевая точка его вторичной обмотки должна быть заземлена. Датчиком тока нулевой последовательности в этом случае может быть шунт, включенный в заземляющий провод.
= const. Датчик тока IN устанавливается на участке между выходом ПЧ и троллеями, или на входе ПЧ. Его основой (см.фиг.2) является фильтр нулевой последовательности, состоящий из трех трансформаторов 11 тока, включенных в линии, вторичные обмотки которых соединены параллельно и имеют на выходе выпрямитель 12 и емкостный фильтр 13, уменьшающий влияние помех на работу ПЧ. При наличии у ПЧ согласующего трансформатора нулевая точка его вторичной обмотки должна быть заземлена. Датчиком тока нулевой последовательности в этом случае может быть шунт, включенный в заземляющий провод.
Изобретение позволяет улучшить качество дистанционного управления ПЧ, питающего через протяженную сеть электродвигателя, обеспечивая возможность непрерывного и плавного изменения частоты и напряжения, что приводит к устранению неблагоприятных переходных процессов, наблюдающихся при скачкообразном изменении частоты в ПЧ, а также к улучшению регулировочных и динамических качеств ЭП, выполненного по системе ПЧ-АД.
Предложенный способ дистанционного управления позволяет применить ЭП, выполненный по системе ПЧ-АД, а таких механизмах, как тельферы и кран балки, управляемые с пола, двигатели которых питаются через троллеи от стационарного ПЧ.
Оснащенная частотно-регулируемым ЭП кран-балка может в ряде случаев оказаться по экономическим соображениям предпочтительнее мостового крана, оборудованного таким же ЭП, так как ее механическая часть дешевле и проще, а ее обслуживание не требует наличия специально обученного персонала крановщиков.
Изобретение относится к электротехнике и может найти применение для дистанционного управления преобразователем частоты, от которого питаются по троллеям электроприводы перемещающегося механизма, например кран - балки. Целью изобретения является повышение точности управления путем обеспечения плавного регулирования питающего напряжения и частоты. Способ дистанционного управления заключается в том, что на объекте управления формируют команду путем изменения тока в одной из фаз трехфазной питающей сети, на объекте регулирования выделяют ток нулевой последовательности питающей сети и выделенный сигнал используют в качестве сигнала отрицательной обратной связи при преобразовании частоты трехфазной питающей сети путем его непрерывного сравнения с заданным сигналом уставки. 2 ил.
СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ, заключающийся в том, что на объекте управления формируют команду путем изменения тока в одной из фаз трехфазной питающей сети, отличающийся тем, что, с целью повышения точности управления путем обеспечения плавного регулирования питающего напряжения и частоты, на объекте регулирования выделяют ток нулевой последовательности питающей сети и выделенный сигнал используют в качестве сигнала отрицательной обратной связи при преобразовании частоты трехфазной питающей сети путем его непрерывного сравнения с заданным сигналом установки.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления на расстоянии | 1940 |
|
SU61001A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
