Изобретение относится к транспортной технике, а именно к шагающим движителям, которые приспособлены для передвижения по пересеченной местности.
Известен механизм возвратно-поступательного перемещения объекта, содержащий соединенный с приводом поворота первый рычаг, одним концом шарнирно установленный в корпусе, соосно неподвижному солнечному колесу, которое с передаточным числом 2:1 кинематически связано с шарнирно смонтированным на втором конце этого рычага сателлитом, к которому жестко присоединен второй рычаг такой же длины, расположенный под тем же углом к горизонтали, как и первый, и элемент для установки перемещаемого объекта, присоединенный к свободному концу второго рычага.
Недостатком этого устройства является невысокая равномерность передвижения.
Цель изобретения - повышение равномерности передвижения.
Это достигается тем, что в механизме возвратно-поступательного перемещения объекта, содержащем соединенный с приводом поворота первый рычаг, одним концом шарнирно установленный в корпусе соосно неподвижному солнечному колесу, которое с передаточным числом 2:1 кинематически связано с шарнирно смонтированным на втором конце этого рычага сателлитом, к которому жестко присоединен второй рычаг такой же длины, расположенный под тем же углом к горизонтали, как и первый, и элемент для установки перемещаемого объекта, присоединенный к свободному концу второго рычага, привод поворота первого рычага выполнен в виде шарнирно соединенного с ним шатуна, второй конец которого связан с ведущим валом через механизм Витворта, кинематическая связь неподвижного солнечного колеса с сателлитом выполнена в виде двух закрепленных на них концами гибких элементов, элемент для установки перемещаемого объекта связан с корпусом двойным шарнирным параллелограммным механизмом, в число звеньев которого включены первый и второй рычаги, а в качестве перемещаемого объекта на нем установлен механизм вертикального перемещения опорной пяты.
На фиг.1 показан механизм, вид спереди; на фиг.2 - вид по стрелке А на фиг.1.
Механизм возвратно-поступательного горизонтального перемещения шагающей опоры содержит соединенный с приводом поворота первый рычаг 1, который одним концом шарнирно установлен в корпусе 2 соосно неподвижному солнечному колесу 3. Это колесо с передаточным числом 2:1 при помощи бесконечного гибкого элемента 4 связано с шарнирно установленным на другом конце рычага 1 сателлита 5, к которому жестко присоединен второй рычаг 6, имеющий такую же длину, как и первый рычаг 1, и расположенный под тем же углом к горизонтали. Гибкий элемент 4 может быть выполнен в виде ремня, закрепленного на колесе 3 и сателлите 5, двух концов каната, закрепленных своими концами на колесе 3 и сателлите 5, или в виде цепи, охватывающей колесо 3 и сателлит 5, которые в этом случае выполнены в виде звездочек. Элемент 7, к которому прикрепляется шагающая опора, имеющая средства ее выдвижения по вертикали (не показана), соединена с корпусом 2 двойным шарнирным параллелограммом, состоящим из первого 1 и второго 6 рычагов, а также из звеньев 8,9 и 10. Привод качательного движения рычага 1 содержит шарнирно соединенный с ним шатун 11, который с ведущим валом 12 связан через механизм Витворта, который состоит из кривошипа 13, палец 14 которого помещен в кулисе 15, установленной на оси рычага 16, конец которого шарнирно связан с шатуном 11. При вращении вала 12 кривошип 13 с переменной угловой скоростью вращает кулису 15 и рычаг 16, качающий шатуном 11 первый рычаг 1. При этом элемент 7 перемещается возвратно-поступательно по горизонтальной прямой. Совместно с выдвижной шагающей опорой (не показана), прикрепленной к элементу 7, данный механизм может быть использован в качестве шагающего движителя, причем при соответственно рассчитанных геометрических размерах механизма Витворта длины шатуна 11 и места его соединения с рычагом 1 элемент 7 может передвигаться в основном с постоянной скоростью. В этом случае, если солнечное колесо 3 установить на корпусе 2 шарнирно и соединить его с дополнительным приводом фиксированного поворота, элемент 7 может изменять свое вертикальное расположение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Педальный привод (варианты) | 2016 |
|
RU2651314C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2003 |
|
RU2255875C1 |
| Направляющий механизм | 1983 |
|
SU1116246A1 |
| Колесно-шагающий движитель транспортного средства | 1977 |
|
SU715376A1 |
| Колесно-шагающий движитель | 1975 |
|
SU552232A1 |
| Способ и устройство компенсации колебаний для колесно-шагового движителя | 2019 |
|
RU2744646C2 |
| ПЕДАЛЬНЫЙ ПРИВОД (ВАРИАНТЫ) | 2010 |
|
RU2421366C1 |
| Привод транспортного средства | 1988 |
|
SU1768436A1 |
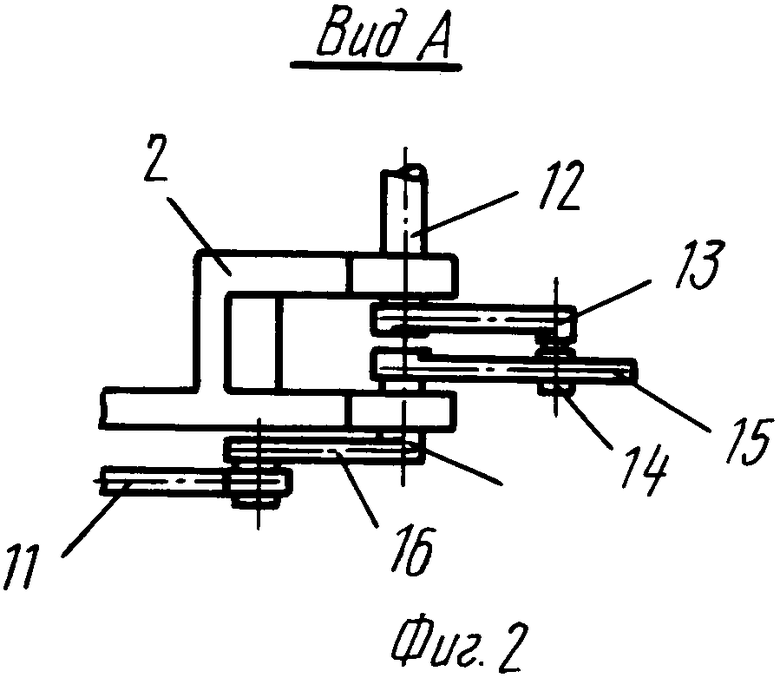
Изобретение относится к шагающим движителям транспортных средств. Сущность изобретения: механизм состоит из двойного шарнирного параллелограмма, один конец которого шарнирно установлен в корпусе 2, а другой соединен с элементом 7, к которому прикреплена выдвижная шагающая опора. Рычаг 1 соединен с приводом вращения шатуном 11 и механизмом Витворга, а с корпусом 2 на шарнире, расположенном в центре неподвижного солнечного колеса 3, связанного с передаточным числом 2:1 гибким элементом 4 - с сателлитом 5, жестко связанным с рыгагом 6. При вращении рычага 16 качается рычаг 1, а элемент 7 двигается горизонтально возвратно - поступательно, а также с постоянной скоростью при соответствующих размерах механизма Витворта и других элементов механизма. 2 ил.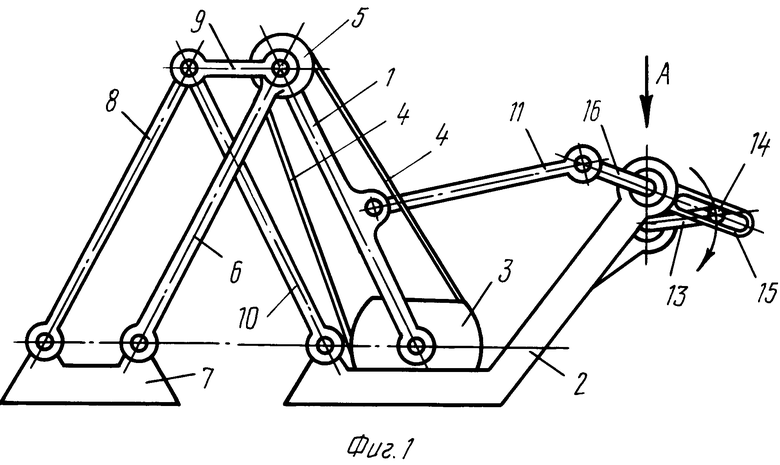
МЕХАНИЗМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА, содержащий соединенный с приводом поворота первый рычаг, одним концом шарнирно установленный в корпусе соосно с неподвижным солнечным колесом, которое с передаточным числом 2 : 1 кинематически связано с шарнирно смонтированным на втором конце этого рычага сателлитом, к которому жестко присоединен второй рычаг такой же длины, расположенный под тем же углом к горизонтали, как и первый, и элемент для установки перемещаемого объекта, присоединенный к свободному концу второго рычага, отличающийся тем, что, с целью повышения равномерности перемещения, привод поворота первого рычага выполнен в виде шарнирно соединенного с ним шатуна, второй конец которого связан с ведущим валом через механизм Витворта, кинематическая связь неподвижного солнечного колеса с сателлитом выполнена в виде двух закрепленных из них концами гибких элементов, элемент для установки перемещаемого объекта связан с корпусом двойным шарнирным параллелограммным механизмом, в число звеньев которого включены упомянутые первой и второй рычаги, а в качестве перемещаемого объекта на нем установлен механизм вертикального перемещения опорной пяты.
| Кожевников С.Н | |||
| "Механизмы", изд | |||
| третье, М.: Машиностроение, 1965, с.668, рис.937 |
