Изобретение относится к судостроению, в частности, к способам прогнозирования качки судна, позволяющим обеспечивать надежную посадку летательных аппаратов на посадочные площадки, расположенные на судах и плавучих технических средствах исследования и основания Мирового океана (научно-исследовательские суда, буровые платформы и др.).
Известен способ прогнозирования качки судна, основанный на использовании методов экстраполяции случайных процессов для построения функции прогнозирования и получения прогноза с заданным упреждением на основе спектральных представлений и позволяющий предсказывать положение посадочной площадки на ограниченном временном интервале.
Однако этот способ недостаточно эффективен, поскольку надежный прогноз может быть обеспечен только на небольшом интервале прогнозирования, составляющем 0,5-0,6 от периода собственных колебаний при бортовой и продольной качках и определяющем выбор условий безопасности посадки. Учитывая, что периоды качки судов и плавучих технических средств освоения Мирового океана составляют порядка 5-14 с, фактический интервал прогнозирования оказывается чрезвычайно малым (3-8,4 с), в пределах которого трудно гарантировать безопасность посадки в сложных погодных условиях. Увеличение интервала прогнозирования приводит к сильному различию теоретических и фактических показателей исследуемых случайных процессов, что не позволяет на практике успешно использовать традиционные методы прогнозирования качки и приводит к авариям во время посадочных операций.
Целью изобретения является повышение достоверности прогноза путем оперативного контроля динамики судна и определения режимов качки, обеспечивающих безопасную посадку летательных аппаратов.
На фиг. 1 представлена функциональная схема, реализующая предлагаемый способ; на фиг. 2 и 3 - процесс колебательного движения судна на волнении и область незначительной качки.
Схема содержит блок датчиков 1, блок 2 коммутации и предварительной обработки информации, первый вычислительный блок 3, первый блок 4 сравнения, оперативное запоминающее устройство 5, второй блок 6 сравнения, второй вычислительный блок 7, интерфейс 8, ЭВМ 9, формирователь 10 сигналов, сигнализатор 11, дисплей 12, накопитель 13 на магнитном диске и принтер 14. Блок датчиков 1 включает измерители угловых перемещений и скоростей при бортовой и килевой качках, чувствительные оси которых расположены вдоль продольной и поперечной центральных осей судна. Блок 2 содержит коммутатор, аналого-цифровой преобразователь и фильтр высоких частот.
Способ реализуется следующим образом.
С помощью датчиков 1 на участке регистрации продолжительностью 15-20 мин измеряют ординаты угловых перемещений θi(t), ϑi(t) и скоростей  (t),
(t),  (t) при бор товой и килевой качках в заданных погодных условиях.
(t) при бор товой и килевой качках в заданных погодных условиях.
В блоке 2 производят коммутацию, преобразование и сглаживание поступающих с датчиков сигналов.
Результаты предварительной обработки информации в виде дискретных сигналов θi, ϑi и  ,
,  заносят в запоминающее устройство 5 и подают на первый вычислительный блок 3.
заносят в запоминающее устройство 5 и подают на первый вычислительный блок 3.
В первом вычислительном блоке 3 определяют область незначительной качки ("окно безопасной посадки") с использованием метода огибающей. Контроль ведется путем сопоставления текущих ординат процесса бортовой качки θi и  и oрдинат огибающей θoi с допустимыми значениями θдоп и
и oрдинат огибающей θoi с допустимыми значениями θдоп и  , установленными по рекомендациям практики эксплуатации в соответствии с требованиями безопасной посадки летательного аппарата (фиг. 2). Алгоритм работы блока сравнения описывают выражениями:
, установленными по рекомендациям практики эксплуатации в соответствии с требованиями безопасной посадки летательного аппарата (фиг. 2). Алгоритм работы блока сравнения описывают выражениями:
начало отсчета временного интервала to области незначительной качки определяют условиями: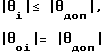
 (1)
(1)
- концу временного интервала tp соответствуют условия



(2)
Ординаты огибающей θoi устанавливают по данным измерений угловых перемещений при бортовой качке
θoi = 0,5 (θm - θm+1 ) - (θm -θm+1) x
x { [(tm+1 - tm + τo)/(tm+1 - tm] - 0,5}, где θm - ордината максимума огибающей, соответствующая наибольшей текущей амплитуде процесса θ (t);
θm+1 - амплитуда первого максимума процесса θ (t) после прохождения значения θm;
tm и tm+1 - моменты времени, соответствующие значениям θm и θm+1;
τo = ti-tm+1 - интервал времени прогнозирования огибающей, не превышающий периода основной гармоники.
Ординаты  и
и  , соответствующие условиям (1) и (2), записывают в запоминающее устройство 5.
, соответствующие условиям (1) и (2), записывают в запоминающее устройство 5.
Второй блок 6 контроля осуществляет проверку правильности определения области незначительной качки с использованием метода огибающей по условиям (1) и (2). Проверку ведут на фазовой плоскости (θ ,  ) путем контроля условий невыхода текущей фазовой траектории, построенной по результатам измерений ординат перемещений и скоростей при бортовой качке на участке (to, tp)k за пределы области допустимых состояний Rдоп, определенной условиями безопасной посадки
) путем контроля условий невыхода текущей фазовой траектории, построенной по результатам измерений ординат перемещений и скоростей при бортовой качке на участке (to, tp)k за пределы области допустимых состояний Rдоп, определенной условиями безопасной посадки
(θi,  ) ∈ Rдоп (3)
) ∈ Rдоп (3)
Откорректированное значение интервала (to, tp)k заносят в устройство 5 и подают в блок 7 для последующей обработки.
Во втором вычислительном блоке 7 формируют массив данных области незначительной качки (to, tp)1, ....,(to, tp)N и производят ее статистическую обработку, где устанавливают среднюю продолжительность и доверительные интервалы. Полученные статистические характеристики записывают в устройство 5, выводят на дисплей 12 и документируют с помощью принтера 14.
В третьем вычислительном блоке с помощью быстродействующей ЭВМ корректируют спрогнозированную модель и осуществляют выбор момента времени topt, соответствующего благоприятному припалубливанию летательного аппарата. Для контроля topt используют данные измере- ний перемещений ϑ (t) и скоростей  (t) процесса килевой качки, частота которого практически вдвое выше частоты бортовой качки.
(t) процесса килевой качки, частота которого практически вдвое выше частоты бортовой качки.
Моменту времени topt в пределах среднего значения области незначительной качки (to, tp) соответствуют условия:
 ,
, 
 ,
,  0, t0< t< tp, (4) где ϑmi - текущее значение первой зафиксированной амплитуды килевой качки после прохождения момента времени to, при котором касание летательным аппаратом посадочной площадки происходит во время движения палубы судна вниз от положения, соответствующего условиям (4);
0, t0< t< tp, (4) где ϑmi - текущее значение первой зафиксированной амплитуды килевой качки после прохождения момента времени to, при котором касание летательным аппаратом посадочной площадки происходит во время движения палубы судна вниз от положения, соответствующего условиям (4);
ϑдоп - допустимое значение амплитуды килевой качки.
Информация о моменте времени topt, полученная в ЭВМ 9, поступает в фоpмирователь 10, где синтезируется сигнал предупреждения пилота о возможности посадки летательного аппарата в заданных погодных условиях.
Результаты прогнозирования качки судна выводят на дисплей 12, передают в сигнализатор 11 и документируют с помощью принтера 14.
Использование параллельной обработки информации в блоках 3-7 позволяет организовать вычислительный процесс по анализу результатов измерений в реальном масштабе времени.
Функциональная схема, реализующая способ прогнозирования качки судна, работает следующим образом.
Данные измерений с блока датчиков 1 через блок 2 коммутации и предварительной обработки информации поступают параллельно на первый вычислительный блок 3, первый блок 4 сравнения, ОЗУ 5 и второй блок 6 сравнения. Первый вычислительный блок 3 осуществляет выделение огибающей и передает ее ординаты в первый блок 4 сравнения, где проверяют условия (1) и (2). Результаты сравнения записывают в ОЗУ 5. Второй блок 6 сравнения проверяет условие (3) и заносит результаты в ОЗУ 5 и второй вычислительный блок 7, где производят статистический анализ данных о продолжительности области незначительной качки. Результаты обработки данных в блоках 3-7 поступают в ЭВМ 9, которая осуществляет контроль момента припалубливания летательного аппарата по условиям (4), основную обработку информации и выдает данные прогнозирования на формирователь 10 сигналов и далее на сигнализатор 11, а кроме того, на дисплей 12, накопитель 13 на магнитном диске и принтер 14.
В процессе проведения взлетно-посадочных операций обработку информации во втором вычислительном блоке 7 не производят, и после выполнения операций сравнения и контроля в блоках 3-6 и 9 результаты измерений поступают в формирователь 10 и на дисплей 12 для принятия решения инженером посадки, сигнализации пилоту, через формирователь 10 записи на магнитном диске 13 и документирования.
Таким образом, способ обеспечивает повышение достоверности прогноза за счет оперативного контроля динамики судна на волнении и определения режимов качки, позволяющих осуществить безопасную посадку летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОГНОЗИРОВАНИЯ КАЧКИ СУДНА ПРИ КОНТРОЛЕ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В МОРСКИХ УСЛОВИЯХ | 2014 |
|
RU2571389C2 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 1991 |
|
RU2016812C1 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 2013 |
|
RU2518374C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2019 |
|
RU2740617C1 |
| Способ посадки беспилотного вертолета на движущееся судно | 2020 |
|
RU2747587C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА НА РАЗРУШАЮЩЕМСЯ ВОЛНЕНИИ | 2011 |
|
RU2455190C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1990 |
|
RU2033370C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1994 |
|
RU2091269C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1991 |
|
RU2040429C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2009 |
|
RU2405712C1 |


Изобретение относится к судостроению, в частности к способам прогнозирования качки судна, позволяющим обеспечить надежную посадку летательных аппаратов на посадочные площадки, расположенные на судах и плавучих технических средствах исследования и освоения Мирового океана, в том числе научно-исследовательские суда, буровые платформы и др. Целью изобретения является повышение достоверности прогноза путем оперативного контроля динамики судна и определения режимов качки, позволяющих осуществить безопасную посадку летательного аппарата. Сущность изобретения заключается в следующем: измеряют угловые перемещения и скорости при бортовой и килевой качках, сравнивают с предельно допустимыми значениями амплитуд бортовой и килевой качек, определяют область незначительной качки, корректируют спрогнозированную модель и осуществляют сигнализацию летчику о моментах начала и завершения взлетно-посадочных операций в заданных погодных условиях. 3 ил.
СПОСОБ ПРОГНОЗИРОВАНИЯ КАЧКИ СУДНА, включающий измерение текущих угловых перемещений палубы судна и формирование на основании предыдущих и последующих перемещений методами экстраполяции модели качки, отличающийся тем, что, с целью повышения достоверности прогноза путем оперативного контроля динамики судна и определения режимов качки, позволяющих осуществить безопасную посадку летательного аппарата, дополнительно измеряют величину скоростей перемещений при бортовой и килевой качках, сравнивают величины перемещений и скоростей перемещений с предельно допустимыми значениями амплитуд бортовой и килевой качек, заданными из условия безопасной посадки, по результатам сравнения определяют область незначительной качки, корректируют спрогнозированную модель и сигнализируют летчику о моментах начала и завершения взлетно-посадочных операций в заданных погодных условиях.
| Бородай И.К | |||
| и Нецветаев Ю.А | |||
| Качка судов на морском волнении | |||
| Л.: Судостроение, 1969, с.303-325. |
