Изобретение относится к области судостроения, в частности к способам контроля остойчивости судна в условиях эксплуатации, и может быть использовано при создании навигационных экспертных систем.
Известен способ контроля устойчивости, основанный на измерении периода бортовой качки и определении расчетом метацентрической высоты, при вычислении которой дополнительно измеряют осадки носом и кормой, кажущийся период волны, курсовой угол и скорость судна на нерегулярном волнении. Недостаток способа низкая достоверность контроля безопасности судна в экстремальных ситуациях, особенно при резкой качке и интенсивных динамических нагрузках на корпус судна.
Цель изобретения повышение достоверности оценки безопасности эксплуатации судна.
Сущность изобретения: дополнительно измеряют период колебаний судна относительно поперечной центральной оси и напряжения, действующие по обеим бортам верхней палубы в плоскости миделя.
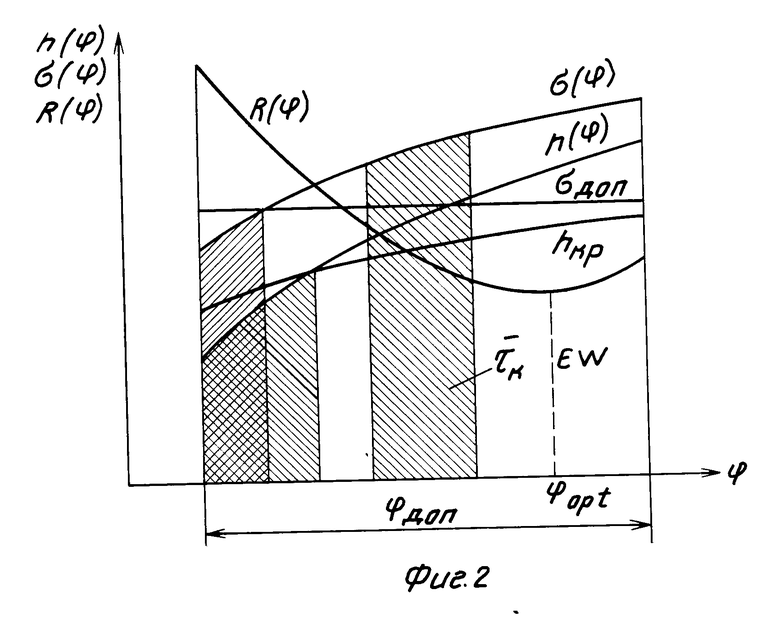
На фиг. 1 представлена структурно-функциональная схема устройства, реализующего предлагаемый способ; на фиг. 2 схема выбора оптимального курсового угла.
Способ контроля остойчивости судна осуществляют следующим образом.
Измеряют курсовой угол волны, скорость судна, осадки носом и кормой и одновременно производят регистрацию периодов колебаний судна относительно продольной и поперечной центральных осей и напряжения, действующие по бортам верхней палубы в плоскости миделя.
По данным измерений устанавливают:
водоизмещение, кажущийся период и фактическую метацентрическую высоту и производят оценку ситуации путем сопоставления фактических показателей остойчивости, качки и прочности с допустимыми значениями по условиям:
h<hкр, σ>σкр,  W, (1) где hкр критическая метацентрическая высота;
W, (1) где hкр критическая метацентрическая высота;
σ и σкр фактическое и допустимое напряжения; W=(0,7-1,3) τθ или (0,7-1,3) τΨ; τθ и τΨ периоды бортовой и килевой качки судна;
область допустимого изменения курсового угла волны ϕдоп= ϕ ±15о, внутри которой выделяют зоны неблагоприятных курсовых углов, определенных условиями (1);
метацентрическую высоту h(ϕ), действующие напряжения σ (ϕ) и полное гидродинамическое сопротивление R(ϕ) в диапазоне ϕдоп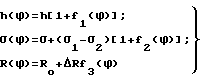 , (2) где f1(ϕ)=а1+а2 ϕ2+а3 ϕ3+а4 ϕ4+а5ϕ 5+а6ϕ 6;
, (2) где f1(ϕ)=а1+а2 ϕ2+а3 ϕ3+а4 ϕ4+а5ϕ 5+а6ϕ 6;
f2(ϕ)=b1ϕ 2+b2ϕ 3+b3ϕ 5+b4 ϕ6+b5 ϕ7+
+b6ϕ 9;
f3( ϕ)=c1ϕ* +с2(ϕ*)3+c3(ϕ*)4+ с4(ϕ*)5+
+ с5(ϕ*)6+с6(ϕ*)9˙[1+f(κR)][1+f(κq)] а1=-0,13, а2=-0,29, а3=0,50, а4=-0,10, а5=0,006, а6=-0,002; b1=-1,58, b2=1,03, b3=-0,061, b4=-0,03, b5=0,013, b6=-0,00027; c1=3,34, c2=-2,60, c3=0,54, c4=0,19, c5=0,0402, c6=-0,0048; ϕ=0 соответствует движению судна на попутном волнении, а ϕ*=0 на встречном волнении; при ϕ*= 3 π/2- π f3(ϕ)=f3(ϕ*=3 π/2)=const; σ1 и σ2 напряжения от общего изгиба корпуса на волнении, установленные при положении судна вразрез волнам и лагом к волнению; f(κR)=3(κR-0,9); κR=(1,2-0,1 α1/2)-(2,9 α1/2-1,9)Fr; Fr= V/(gL)1/2; g ускорение свободного падения; L длина судна; f(κq)= -1,05q*+0,78(q*)2; q*=q-0,3; q=qo(10h3%/L); qo=1,0 для развитого, qo= 0,7 для развивающегося и qo=1,5 для волнения зыби; h3% высота волны 3%-ной обеспеченности; Rо сопротивление судна на тихой воде; Δ R дополнительное сопротивление на встречном волнении; α коэффициент полноты ватерлинии;
оптимальные значения курсового угла ϕорt и скорости судна Vорt, соответствующие минимуму полного гидродинамического сопротивления на участке ϕдоп (при отсутствии указанного минимума принимают наименьшую величину сопротивления за пределами выделенных по условиям (1) зон неблагоприятных курсовых углов), где Vopt=V+ Δ V; V скорость; Δ V=[(R/R*)1/3-1] приращение скорости, вызванное снижением сопротивления; R и R* значения сопротивления при курсовых углах ϕ и ϕopt.
Устройство содержит датчики курсового угла 1 и скорости судна 2, значения которых вводят в ЭВМ 10 с помощью дисплея 11, датчики периодов колебательного движения судна относительно продольной 3 и поперечной 4 центральных осей, датчики 5 и 6 давлений, характеризующие осадки судна носом и кормой, датчики напряжений по правому 7 и левому 8 бортам верхней палубы в плоскости миделя, сигналы от которых поступают на вход программно-управляющего модуля 9 преобразования исходной информации и ввода ее в ЭВМ 10 с цветным графическим дисплеем 11 и принтером 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1992 |
|
RU2043271C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА НА РАЗРУШАЮЩЕМСЯ ВОЛНЕНИИ | 2011 |
|
RU2455190C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1991 |
|
RU2040429C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2009 |
|
RU2405712C1 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 2013 |
|
RU2518374C1 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 1991 |
|
RU2016812C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1998 |
|
RU2147540C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1994 |
|
RU2091269C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА В УСЛОВИЯХ ЭКСТРЕМАЛЬНОГО ВОЛНЕНИЯ | 2016 |
|
RU2647357C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1989 |
|
RU2033369C1 |

Использование: в судостроении, для контроля остойчивости судна в условиях эксплуатации. Сущность изобретения: измеряют период бортовой качки, осадку носом и кормой, кажущийся период волны, курсовой угол, скорость судна, период колебательного движения судна относительно поперечной центральной оси и напряжения, действующее на миделе в контролируемом сечении по правому и левому бортам верхней палубы. 2 ил.
СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА, отличающийся тем, что, с целью повышения достоверности оценки безопасности эксплуатации судна, дополнительно измеряют период колебаний судна относительно поперечной центральной оси и напряжения, действующие по бортам верхней палубы в плоскости миделя.
| Авторское свидетельство СССР N 1667334, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
