Изобретение относится к судостроению, в частности к способам контроля мореходных качеств судов в условиях эксплуатации, и может быть использовано при создании экспертных систем безопасности мореплавания.
Известен способ контроля остойчивости [1] основанный на измерении периода бортовой качки и определении расчетом метацентрической высоты, при вычислении которой дополнительно измеряют осадки носом и кормой, кажущийся период волны, курсовой угол и скорость судна на нерегулярном волнении.
Цель изобретения расширение функциональных возможностей способа и повышение достоверности оценки мореходных качеств судов.
Для этого дополнительно измеряют угловые перемещения относительно поперечной и вертикальной осей, а также линейные и угловые ускорения относительно продольной, поперечной и вертикальной центральных осей.
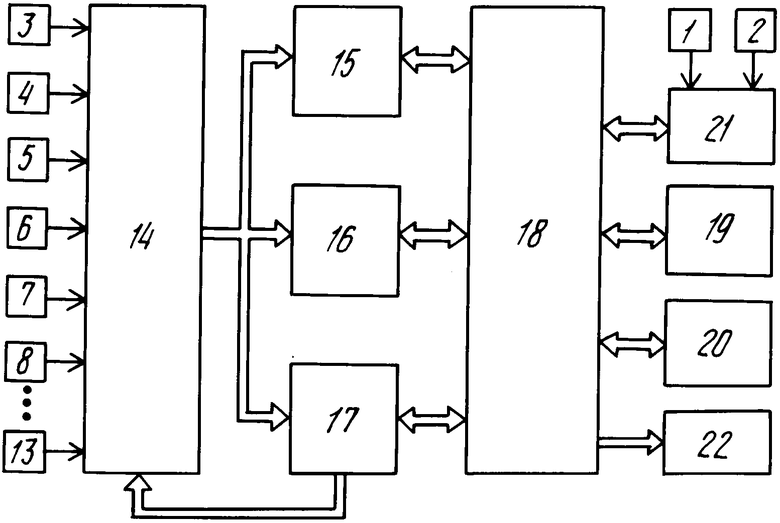
На чертеже представлена структурно-функциональная схема устройства, осуществляющего предлагаемый способ.
Способ контроля мореходности судов осуществляют следующим образом.
Измеряют курсовой угол волны, скорость судна, кажущийся период волны, осадки носом и кормой и одновременно производят регистрацию угловых перемещений относительно продольной, поперечной и вертикальной центральных осей, а также линейных и угловых ускорений всех видов колебательного движения судна на волнении как динамической системы с шестью степенями свободы.
По данным измерений устанавливают водоизмещение, фактическую метацентрическую высоту и соответствующую аппликату ЦТ, производят оценку остойчивости, для чего вычисляют спектральную плотность S(ω) и параметры морского волнения, дисперсии Dq, Dq и среднюю частоту  относительных колебаний волнового уровня относительно корпуса судна, дисперсию DzB и среднюю частоту
относительных колебаний волнового уровня относительно корпуса судна, дисперсию DzB и среднюю частоту  колебаний минимального погружения гребного винта, дисперсию рыскания Dx, дисперсии Dx, Dy, Dz проекций полного вектора ускорений при колебательном движении судна на волнении и производят оценку показателей, характеризующих мореходные качества судна:
колебаний минимального погружения гребного винта, дисперсию рыскания Dx, дисперсии Dx, Dy, Dz проекций полного вектора ускорений при колебательном движении судна на волнении и производят оценку показателей, характеризующих мореходные качества судна:
1. Вероятности заливания Рз и среднего числа N погружений палубы под поверхность волны за единицу времени То
P3= exp[-(F*)2/2Dq] N (1/2π) P3, где F* расчетная высота надводного борта.
P3, где F* расчетная высота надводного борта.
2. Вероятности слеминга Ро и среднего числа ударов Nуд за время То
Pc= exp{ -[(T ] Nуд= (1/2π)
] Nуд= (1/2π) ToPc, где Т1 расчетная осадка в зоне удара;
ToPc, где Т1 расчетная осадка в зоне удара;
g ускорение свободного падения;
L длина судна.
3. Вероятности оголения лопастей гребного винта Рог и среднего числа оголений Nог за время То
Pог exp{-0,5[(Ho-R)/(Dzв)1/2]2}
Nог= [1/(2π)1/2] To[Ho-R)/(D
To[Ho-R)/(D )]Pог, где Hо погружение оси винта;
)]Pог, где Hо погружение оси винта;
R радиус винта.
4. Амплитуды рыскания
χ3% 2,64 (Dχ)1/2.
5. Суммарных ускорений, действующих при качке судна на волнении
U1 (Dx + Dy + Dz)1/2, U2=(Dx + Dy)1/2.
Описание процедуры обработки данных измерений выполняются с помощью спецпроцессоров и быстродействующей персональной ЭВМ и реализуются в экспертной системе, позволяющей осуществлять оценку мореходных качеств судна на основе действующих критериев и принимать обоснованные решения по обеспечению безопасности эксплуатации судна.
Устройство содержит датчики курсового угла 1 и скорости судна 2, значения которых вводят в ЭВМ с помощью дисплея 21, датчики осадок судна носом 3 и кормой 4, датчики угловых перемещений при колебательном движении судна относительно продольной 5, поперечной 6 и вертикальной 7 осей, датчик ускорений 8-13 всех видов качки судна на волнении, сигналы от которых через блок коммутации и предварительной обработки информации 14 поступают для дальнейшей обработки в специализированные процессоры: процессор-классификатор 15, позволяющий анализировать измеряемые сигналы с целью установления их статистических характеристик, проверки свойства стационарности, идентификации их распределений и оценки спектральных плотностей, процессор-редактор 16, осуществляющий редактирование выбросов и масштабирование измеряемых сигналов, и метрологический процессор 17, выполняющий периодическую самопроверку, самокалибровку и коррекцию измерений. Управление базой данных 19 и базой знаний 20 экспертной системы осуществляет интеллектуальный процессор быстродействующей ЭВМ 18, обеспечивающий также интерфейс с пользователем через цветной графический дисплей 21, вывод результатов на печать 22 и взаимодействие между специализированными процессорами 15 и 16.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272739C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1998 |
|
RU2147540C1 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 1991 |
|
RU2016812C1 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 2013 |
|
RU2518374C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА НА РАЗРУШАЮЩЕМСЯ ВОЛНЕНИИ | 2011 |
|
RU2455190C1 |
| Способ контроля процесса эвакуации экипажа и пассажиров при возникновении морских катастроф | 2017 |
|
RU2658232C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1990 |
|
RU2033370C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2009 |
|
RU2405712C1 |
Использование: контроль мореходности судов в условиях эксплуатации с помощью экспертных систем безопасности мореплавания. Сущность изобретения: дополнительно измеряют угловые перемещения относительно поперечной и вертикальной осей, а также линейные и угловые ускорения относительно продольной, поперечной и вертикальной центральных осей, устанавливают характеристики заливаемости, слеминга, оголения лопастей гребного винта, рыскания и суммарные ускорения, действующие при качке. 1 ил.
СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА, основанный на измерении периода бортовой качки, осадки носом и кормой "кажущегося" периода волны, курсового угла и скорости судна на нерегулярном волнении и определении расчетом метацентрической высоты, отличающийся тем, что дополнительно измеряют угловое перемещение судна относительно поперечной и вертикальных осей, а также линейные и угловые ускорения относительно продольной, поперечной и вертикальной центральных осей.
| Авторское свидетельство СССР N 1667334, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
