Изобретение относится к авиации и может быть использовано для посадки беспилотного вертолета на движущееся судно.
Известен способ посадки беспилотного вертолета на судно, при котором он зависает над взлетно-посадочной полосой и затем, за счет сцепления захватных устройств вертолета и судна между собой, вертолет принудительно притягивают к взлетно-посадочной полосе (см. а.с. СССР № 1819822, МПК B64F 1/00, дата публикации 07.06. 1993).
Недостатком данного решения является тот факт, что в процессе посадки не учитывают воздействие внешних факторов, которые влияют на положение взлетно-посадочной полосы в пространстве (например, качка и ветер).
В качестве ближайшего аналога принят способ посадки беспилотного летательного аппарата на движущееся судно, при котором с помощью судового посадочного оборудования формируют зону посадки, которая является ориентиром для камеры вертолета, вертолет выполняет маневр снижения и при этом движется к зоне посадки, координаты которой определяют с учетом качки, рысканья и перемещения судна, затем происходит посадка вертолета (см. патент РФ № 110070, МПК B64F 1/18, B64C 13/18, G05D 1/10, дата публикации 10.11.2011).
Недостатками ближайшего аналога являются:
- громоздкость системы - летательный аппарат снабжен блоком определения параметров качки; в зоне посадки расположены световые маяки и кран-балка с захватным приспособлением; движение летательного аппарата останавливают с помощью тормозного устройства;
- жестко заданные условия, выполнение которых требует высокой точности и более сложных расчетов - наведение камеры летательного аппарата в точку прицеливания захватного приспособления и вычисление координат нескольких световых маяков; приближение летательного аппарата к зоне посадки на относительно небольшое расстояние, обусловленное длиной троса; необходимость четкого зацепления между карабином летательного аппарата и тросом захватного приспособления.
Задачей, на решение которой направлено предлагаемое изобретение, является разработка удобного и точного способа посадки вертолета без его принудительной остановки с помощью судового оборудования, который не требует установки оборудования в зоне посадки.
Технический результат, который достигается при решении поставленной задачи, выражается в повышении точности и безопасности посадки, более эффективном взаимодействии вертолета и судна, расширении области применения.
Поставленная задача решается тем, что способ посадки беспилотного вертолета на движущееся судно, при котором с помощью судового посадочного оборудования формируют зону посадки, которая является ориентиром для камеры вертолета, вертолет выполняет маневр снижения и при этом движется к зоне посадки, координаты которой определяют с учетом качки, рысканья и перемещения судна, затем происходит посадка вертолета, отличается тем, что с помощью вычислительного устройства судна формируют зону посадки в виде виртуальной посадочной плоскости в форме четырехугольника, вытянутого и симметричного относительно центральной продольной оси судна, причем виртуальную посадочную плоскость формируют на фиксированной высоте, значение которой определяют путем отсчета от горизонтальной плоскости уровня моря при спокойной воде высоты максимального возвышения вертолетной палубы судна при суммарном воздействии на него всех элементов качки и прибавлением к ней 1,2-1,5 м, кроме того, виртуальную посадочную плоскость формируют с возможностью ее перемещения в горизонтальной плоскости со скоростью судна по его курсу, при отсутствии влияния на ее положение факторов качки и рыскания, при этом положение в горизонте формируют путем осреднения всех горизонтальных перемещений судна за счет качки и рыскания, камера вертолета выполнена с фиксированным углом направленности, близким к вертикальному, в ее мониторе, в пределах зоны видимости, выполнено ограничительное поле, площадь которого совпадает с площадью виртуальной посадочной плоскости при условии, что вертолет по своему положению в пространстве находится в конечной точке снижения перед подачей команды на посадку, вертолет перемещается по траектории снижения, удерживая изображение виртуальной посадочной плоскости в ограничительном поле зоны видимости камеры, пока не произойдет совмещение ограничительного поля зоны видимости камеры вертолета с изображением виртуальной посадочной плоскости с учетом поправки курса вертолета на ветер, причем совмещение обеспечивается оператором или автоматически, путем подачи команд от судна вертолету, далее вертолет удерживают в конечной точке снижения, пока вертолетная палуба не займет в пространстве положение с наивысшим возвышением при прохождении диаметральной плоскости судна через продольную центральную ось виртуальной посадочной плоскости, в этот момент вертолету дается команда на посадку.
Сопоставительный анализ совокупности существенных признаков предлагаемого технического решения и совокупности существенных признаков прототипа и аналогов свидетельствует о его соответствии критерию «новизна».
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признаки «с помощью вычислительного устройства судна формируют зону посадки в виде виртуальной посадочной плоскости» обеспечивают возможность формирования зоны посадки на различных судах и тем самым расширяют область применения.
Признаки «виртуальная посадочная плоскость… в форме четырехугольника, вытянутого и симметричного относительно центральной продольной оси судна» описывают форму и ориентацию зоны посадки.
Признаки «виртуальную посадочную плоскость формируют на фиксированной высоте, значение которой определяют путем отсчета от горизонтальной плоскости уровня моря при спокойной воде высоты максимального возвышения вертолетной палубы судна при суммарном воздействии на него всех элементов качки и прибавлением к ней 1,2-1,5 м» описывают минимальное и безопасное значение высоты, на которой вертолет зависает над судном.
Признаки «виртуальную посадочную плоскость формируют с возможностью ее перемещения в горизонтальной плоскости со скоростью судна по его курсу, при отсутствии влияния на ее положение факторов качки и рыскания, при этом положение в горизонте формируют путем осреднения всех горизонтальных перемещений судна за счет качки и рыскания» позволяют в режиме реального времени обеспечивать оптимальное положение виртуальной посадочной плоскости в горизонтальной плоскости.
Признаки «камера вертолета выполнена с фиксированным углом направленности, близким к вертикальному» позволяет осуществлять перемещение ограничительного поля только за счет движения вертолета, не учитывая угол наклона камеры.
Признаки «в мониторе [камеры], в пределах зоны видимости, выполнено ограничительное поле» позволяют организовать для камеры вертолета «прицел», который можно навести на виртуальную посадочную плоскость способом перемещения вертолета по командам оператора или автоматически.
Признаки «площадь ограничительного поля совпадает с площадью виртуальной посадочной плоскости при условии, что вертолет по своему положению в пространстве находится в конечной точке снижения перед подачей команды на посадку» задают условия расположения вертолета над виртуальной посадочной плоскостью в конечной точке снижения перед подачей команды на посадку.
Признаки «вертолет перемещается по траектории снижения, удерживая изображение виртуальной посадочной плоскости в ограничительном поле зоны видимости камеры, пока не произойдет совмещение ограничительного поля зоны видимости камеры вертолета с изображением виртуальной посадочной плоскости с учетом поправки курса вертолета на ветер» позволяют более точно привести вертолет в конечную точку снижения над зоной посадки, учитывая воздействие внешних факторов в режиме реального времени.
Признаки «совмещение обеспечивается оператором или автоматически, путем подачи команд от судна вертолету» расширяют область применения за счет возможности выбора исполнителя, который осуществляет совмещение.
Признаки «вертолет удерживают в конечной точке снижения, пока вертолетная палуба не займет в пространстве положение с наивысшим возвышением при прохождении диаметральной плоскости судна через продольную центральную ось виртуальной посадочной плоскости, в этот момент вертолету дается команда на посадку» определяют момент для подачи команды на посадку, когда вертолетная палуба судна занимает оптимальное положение с учетом параметров качки.
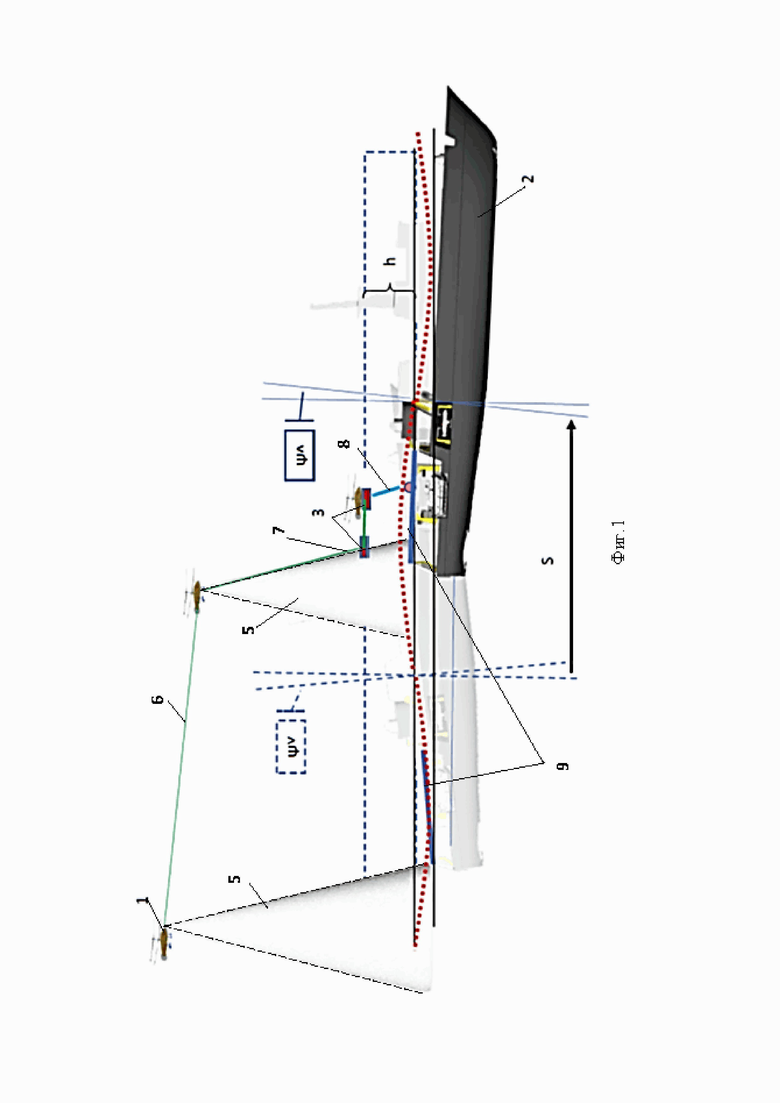
На фиг.1 изображена траектория перемещения вертолетной палубы при движении судна в условиях килевой качки.
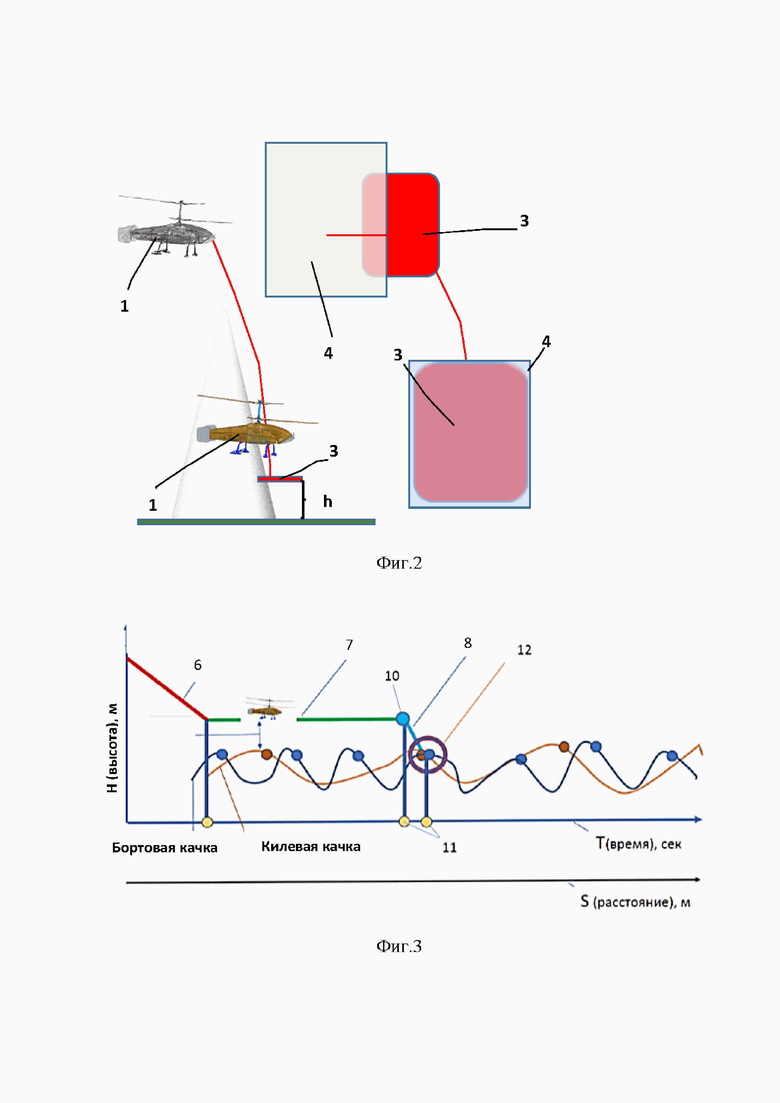
На фиг.2 изображены зона видимости камеры вертолета и виртуальная посадочная плоскость при снижении вертолета на фиксированную высоту.
На фиг.3 показаны траектория снижения вертолета и выбор момента для подачи команды на посадку с помощью графиков бортовой и килевой качки.
На чертежах показаны беспилотный вертолет 1, движущееся судно 2, виртуальная посадочная плоскость 3, ограничительное поле 4 зоны видимости 5 камеры вертолета 1, участки снижения 6, ожидания 7 и посадки 8, вертолетная палуба 9, момент 10 для подачи команды на посадку, контрольные точки 11 переходов траектории вертолета 1, оптимальная точка касания 12.
Также на чертежах обозначены:
h - высота безопасности, значение которой фиксированное и его определяют путем отсчета от горизонтальной плоскости уровня моря при спокойной воде высоты максимального возвышения вертолетной палубы судна при суммарном воздействии на него всех элементов качки и прибавлением к ней 1,2-1,5 м - запас безопасной высоты по вертикали выше предельной точки восхождения плоскости вертолетной палубы в горизонтальном состоянии;
S - путь судна за время полупериода килевой качки;
 - угол дифферента судна при килевой качке.
- угол дифферента судна при килевой качке.
Беспилотный вертолет 1 снабжен камерой (на чертежах не показана) с фиксированным углом направленности, близким к вертикальному, причем в мониторе камеры, в пределах зоны видимости 5, выполнено ограничительное поле 4, площадь которого совпадает с площадью виртуальной посадочной плоскости 3 при условии, что вертолет 1 по своему положению в пространстве находится в конечной точке снижения перед подачей команды на посадку.
На судне 2 расположены вычислительное устройство (на чертежах не показано), которое входит в состав судового посадочного оборудования, и вертолетная палуба 9.
Вертолетную палубу 9 предпочтительно размещать в кормовой части судна 2, хотя возможны и другие варианты расположения.
С помощью вычислительного устройства судна на высоте h формируют зону посадки в виде виртуальной посадочной плоскости 3 в форме четырехугольника, вытянутого и симметричного относительно центральной продольной оси судна 2.
Виртуальную посадочную плоскость 3 формируют с возможностью ее перемещения в горизонтальной плоскости со скоростью судна 2 по его курсу, при отсутствии влияния на ее положение факторов качки и рыскания, при этом положение в горизонте формируют путем осреднения всех горизонтальных перемещений судна 2 за счет качки и рыскания.
При формировании виртуальной посадочной плоскости 3 учитывают влияние следующих факторов:
1. Скорость, курс, горизонтальные перемещения судна.
2. Ветер - центральная продольная ось ограничительного поля 4 может быть развернута относительно центральной продольной оси виртуальной посадочной плоскости 3 на величину несовпадения курса судна 2 и курса вертолета 1 при заходе на посадку за счет учета ветрового сноса.
3. Качка - в соответствии с принятыми системами координат существует 6 видов качки:
- продольно-горизонтальная;
- поперечно-горизонтальная;
- вертикальная качка;
- бортовая качка;
- килевая качка;
- рыскание.
Для кораблей, плавающих в свободном состоянии, восстанавливающие силы существуют только для вертикальной, бортовой и килевой качки, поэтому эти виды качки называют основными. Другие виды качки называются дополнительными.
При выполнении операции по посадке вертолета в условиях благоприятной погоды, в учет могут быть приняты только два вида качки - килевая и бортовая.
Для уменьшения влияния действия обоих видов качки на факторы безопасности посадки целесообразно решить задачу по выбору оптимальной точки касания вертолета 1 и вертолетной палубы 9.
Для этой цели на судне 2 определяют параметры бортовой и килевой качки и рассчитывают ряд величин:
- моменты максимального подъема вертолетной палубы 9 за счет килевой качки;
- моменты прохождения вертикали нормалью вертолетной палубы 9 в поперечной плоскости при килевой качке.
Рассчитывают запас безопасной высоты вертолета 1 на участке 7 ожидания, который принимают равным 1,2-1,5 м по вертикали выше предельной точки восхождения плоскости вертолетной палубы 9 в горизонтальном состоянии.
Выбор точки касания осуществляется в момент максимального отрицательного значения килевой качки, т.е. положения точки касания на максимальной высоте вертолетной палубы 9 и при максимальном совпадении этого момента с моментом прохождения нормали к вертолетной палубе 9 через вертикаль в поперечной плоскости.
Особенностью выбора точки касания в момент прихода вертолетной палубы 9 в верхнее положение (максимальное отрицательное значение килевой качки) является то, что в этой точке вертикальная скорость перемещения вертолетной палубы 9 замедляется до нуля (вектор угловой скорости меняет свое значение на противоположное).
Графики бортовой и килевой качки во времени имеют формы неправильных синусоид, как показано на фиг.3.
Для смягчения посадки точка касания должна быть выбрана на начальном участке нисхождения синусоид при совпадении точек максимальных плюсовых амплитуд.
Это дает следующие преимущества:
- минимальный угол бортового наклона вертолетной палубы 9;
- движение вертолета 1 и вертолетной палубы 9 в одном направлении (смягчение касания);
- меньший по высоте участок посадки траектории вертолета 1.
Оптимальные точки посадки могут быть вычислены математически и введены в автомат посадки и контролироваться вручную.
При проходе (пропуске) очередной точки оптимальной посадки, посадка может быть произведена следующей точке, выбранной на графике.
Отображение графиков качки с изображением оптимальной точки посадки должно быть выведено на монитор оператора, управляющего полетом.
Вертолет 1 может быть оборудован лазерными дальномерами побортно для контроля положения вертолетной палубы 9.
Для разработки алгоритма посадки следует вооружить вычислительное устройство самообучаемым программным устройством с набранной статистикой траекторий качки судна 2 в различных условиях.
Посадка беспилотного вертолета на движущееся судно осуществляется следующим образом.
При приближении к судну 2 вертолет 1 снижается по траектории участка снижения 6 до высоты h.
Далее вертолет 1 движется по траектории участка ожидания 7, удерживая изображение виртуальной посадочной плоскости 3, формируемой с помощью вычислительного устройства судна, в ограничительном поле 4 зоны видимости 5 камеры.
При этом вертолет 1 летит с горизонтальной скоростью, превышающей скорость горизонтального перемещения точки посадки на величину около 0,5 м/c, по курсу (точнее по направлению пути корабля, т.к. учитывают ветровой снос).
Движение вертолета 1 на участке ожидания 7 происходит до тех пор, пока не произойдет совмещение ограничительного поля 4 зоны видимости 5 камеры вертолета 1 с изображением виртуальной посадочной плоскости 3 с учетом поправки курса вертолета на ветер, причем совмещение обеспечивается оператором или автоматически, путем подачи команд от судна 2 вертолету 1.
Вертолет 1 удерживают в конечной точке снижения, пока вертолетная палуба 9 не займет в пространстве положение с наивысшим возвышением при прохождении диаметральной плоскости судна 2 через продольную центральную ось виртуальной посадочной плоскости 3, в этот момент, когда достигнута оптимальная точка касания 12, вертолету 1 дается команда на посадку, и он перемещается по траектории участка посадки 8.
При касании вертолет 1 может иметь небольшую продольную скорость <0,5 м/с в относительном перемещении.
При проскоке оптимальной точки касания и проходе вертолета 1 в носовую часть вертолетной палубы 8, может быть дана команда на повторный заход.
Параллельно на оси времени отмечают контрольные точки 11, в которых изменилась траектория снижения вертолета 1, т.е. произошел переход от одного участка траектории к другому.
Изобретение относится к способу посадки беспилотного вертолета на движущееся судно. Для посадки беспилотного вертолета с помощью судового посадочного оборудования формируют зону посадки, которая является ориентиром для камеры вертолета, выполняют маневр снижения определенным образом с учетом качки, рысканья и перемещения судна, производят посадку вертолета, при этом с помощью вычислительного устройства судна формируют зону посадки на фиксированной высоте в виде виртуальной посадочной плоскости в форме четырехугольника, а также с возможностью ее перемещения в горизонтальной плоскости со скоростью судна по его курсу, производят перемещение вертолета по траектории снижения, удерживая изображение виртуальной посадочной плоскости в ограничительном поле зоны видимости камеры, пока не произойдет совмещение ограничительного поля зоны видимости камеры вертолета с изображением виртуальной посадочной плоскости, удерживают вертолет в конечной точке снижения, пока вертолетная палуба не займет в пространстве положение с наивысшим возвышением при прохождении диаметральной плоскости судна через продольную центральную ось виртуальной посадочной плоскости, в этот момент вертолету дают команду на посадку. Обеспечивается повышение точности и безопасности посадки. 3 ил.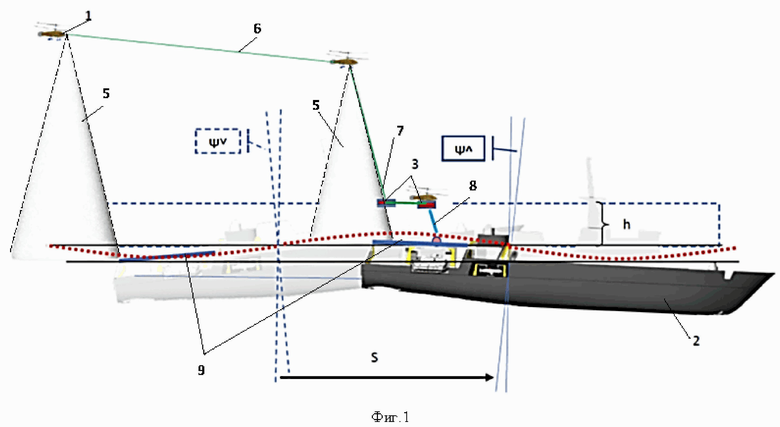
Способ посадки беспилотного вертолета на движущееся судно, при котором с помощью судового посадочного оборудования формируют зону посадки, которая является ориентиром для камеры вертолета, вертолет выполняет маневр снижения и при этом движется к зоне посадки, координаты которой определяют с учетом качки, рысканья и перемещения судна, затем происходит посадка вертолета, отличающийся тем, что с помощью вычислительного устройства судна формируют зону посадки в виде виртуальной посадочной плоскости в форме четырехугольника, вытянутого и симметричного относительно центральной продольной оси судна, причем виртуальную посадочную плоскость формируют на фиксированной высоте, значение которой определяют путем отсчета от горизонтальной плоскости уровня моря при спокойной воде высоты максимального возвышения вертолетной палубы судна при суммарном воздействии на него всех элементов качки и прибавлением к ней 1,2-1,5 м, кроме того, виртуальную посадочную плоскость формируют с возможностью ее перемещения в горизонтальной плоскости со скоростью судна по его курсу, при отсутствии влияния на ее положение факторов качки и рыскания, при этом положение в горизонте формируют путем осреднения всех горизонтальных перемещений судна за счет качки и рыскания, камера вертолета выполнена с фиксированным углом направленности, близким к вертикальному, в ее мониторе, в пределах зоны видимости, выполнено ограничительное поле, площадь которого совпадает с площадью виртуальной посадочной плоскости при условии, что вертолет по своему положению в пространстве находится в конечной точке снижения перед подачей команды на посадку, вертолет перемещается по траектории снижения, удерживая изображение виртуальной посадочной плоскости в ограничительном поле зоны видимости камеры, пока не произойдет совмещение ограничительного поля зоны видимости камеры вертолета с изображением виртуальной посадочной плоскости с учетом поправки курса вертолета на ветер, причем совмещение обеспечивается оператором или автоматически, путем подачи команд от судна вертолету, далее вертолет удерживают в конечной точке снижения, пока вертолетная палуба не займет в пространстве положение с наивысшим возвышением при прохождении диаметральной плоскости судна через продольную центральную ось виртуальной посадочной плоскости, в этот момент вертолету дается команда на посадку.
| СПОСОБ ПОСАДКИ ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2516244C2 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2543144C2 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОСАДКОЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2518434C2 |
| KR 1020130130498 A, 02.12.2013 | |||
| JP 0005170191 A, 09.07.1993. | |||

