Изобретение относится к подъемно-транспортному машиностроению и может быть использовано преимущественно для установки тяжеловесных грузов на платформу.
Известно грузоподъемное устройство, принятое за прототип, содержащее стрелу с шарнирно закрепленной на свободном конце грузовой стрелой и дополнительный рычаг, шарнирно установленный на основании. Свободный конец рычага шарнирно связан со штоком цилиндра рычага, корпус которого шарнирно связан с основанием, стрела шарнирно связана со штоком цилиндра стрелы, корпус которого шарнирно связан со свободным концом рычага, а грузовая стрела связана со штоком грузового цилиндра, корпус которого шарнирно связан со стрелой. Гидроцилиндры связаны с двумя установленными параллельно распределителями. Штоковые полости цилиндров стрелы и грузовой стрелы связаны между собой, а поршневые полости связаны соответственно с выходами первого распределителя, входы которого подключены к питанию и сливу. Выходы второго распределителя сообщены с полостями цилиндра рычага, а входы - к питанию и сливу (авт.св. N 1212919, кл. В 66 С 23/06, 1986).
Недостатком этого устройства является ограниченная зона обслуживания, так как оно обеспечивает перемещение груза только с одной стороны от опоры стрелы (в зоне, противоположной дополнительному рычагу). Для выполнения грузовых работ необходимо обеспечить вылет стрелы, равный сумме размера грузовой платформы и расстояния до места строповки наибольшего груза, что влечет за собой увеличение габарита устройства и энергозатрат за счет увеличения давления и расходов рабочей среды в системе привода.
Целью изобретения является расширение зоны обслуживания при одновременном снижении энергозатрат за счет снижения давления и расходов рабочей среды в системе привода.
Для этого в предлагаемом грузоподъемном устройстве, состоящем из грузонесущего звена, содержащего стрелу, шарнирно соединенную с основанием, на котором шарнирно установлен дополнительный рычаг, свободный конец стрелы шарнирно связан с грузовой стрелой с захватным органом, и систему управления, включающую в себя цилиндры рычага, стрелы и грузовой стрелы, шток первого из них связан шарнирно со свободным концом рычага, а корпус - с основанием, шток цилиндра стрелы шарнирно связан со стрелой, а корпус - со свободным концом рычага, шток цилиндра грузовой стрелы шарнирно связан с грузовой стрелой, а корпус - со стрелой, при этом цилиндры связаны с установленными параллельно двумя распределителями, входы которых сообщены с питанием и сливом, выход второго распределителя сообщен с поршневой полостью цилиндра стрелы, в грузонесущем звене дополнительный рычаг установлен относительно шарнира стрелы со стороны захватного органа, в системе управления штоковая и поршневая полости цилиндра грузовой стрелы сообщены с выходами первого распределителя, штоковые и поршневые полости цилиндров рычага и стрелы сообщены соответственно с первым и вторым выходами второго распределителя, при этом устройство выполнено из двух взаимно параллельно установленных грузонесущих звеньев.
Грузонесущие звенья могут быть выполнены с жестко связанными грузозахватными стрелами, при этом в системе управления у обоих грузонесущих звеньев одноименные полости соответствующих цилиндров сообщаются с двумя соответственными распределителями.
Отличительные признаки предлагаемого решения не найдены в других технических решениях, это позволяет сделать вывод о соответствии технического решения критерию "существенные отличия".
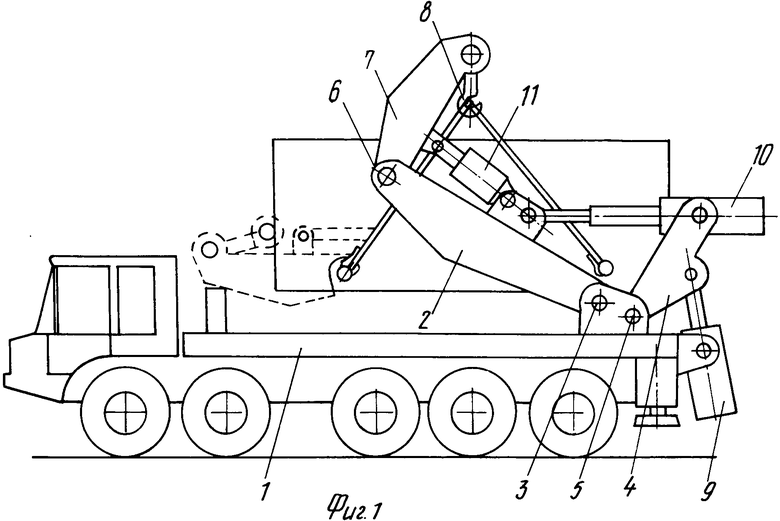
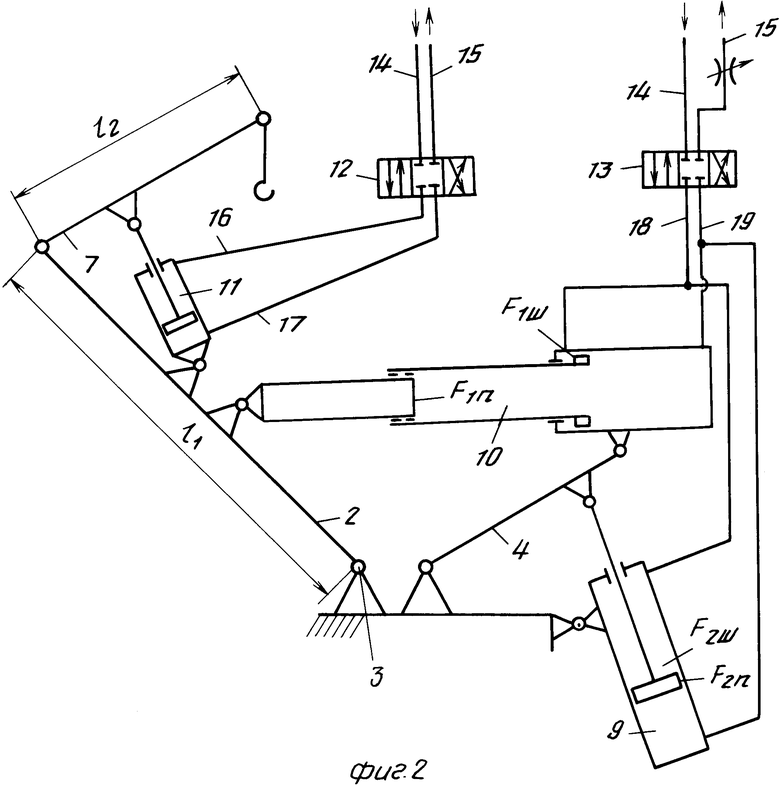
На фиг. 1 показан общий вид грузоподъемного устройства; на фиг. 2 - схема грузоподъемного устройства.
Грузоподъемное устройство состоит из основания 1, на котором установлены взаимно параллельно два грузонесущих звена, разнесенные относительно друг друга на ширину транспортируемого груза, Каждое грузонесущее звено выполнено в виде установленных на основании стрелы 2 посредством шарнира 3 и дополнительного рычага 4 посредством, например, шарнира 5. Свободный конец стрелы 2 связан посредством шарнира 6 с грузовой стрелой 7, на которой установлен захватный орган 8. Дополнительный рычаг 4 размещен относительно шарнира 3 со стороны захватного органа 8. Грузовые стрелы 7 грузонесущих звеньев могут быть жестко связаны между собой посредством ригеля (не показан).
Грузонесущее звено снабжено системой управления, включающей, например, цилиндр 9 рычага, цилиндр 10 стрелы, цилиндр 11 грузовой стрелы и два параллельно установленных распределителя 12 и 13. Цилиндр 9 связан с рычагом 4 штоком и с основанием 1 корпусом. Шток цилиндра 10 выполнен, например, телескопическим для увеличения хода и шарнирно связан со стрелой, корпус цилиндра 10 шарнирно связан с рычагом 4. Шток цилиндра 11 шарнирно связан с грузовой стрелой 7, а корпус - со стрелой 2. К входу первого распределителя 12 подведены линии 14 и 15 питания и слива, а к выходу - линии 16 и 17 соответственно штоковой и поршневой полостей цилиндра 11. К входам второго распределителя 13 также подведены линии 14 и 15 питания и слива, а к выходам - линии 18 и 19 соответственно штоковой и поршневой полостей цилиндров 9 и 10.
Параметры силовой схемы устройства должны отвечать следующим требованиям >
>  , (1)
, (1) < 1, (2)
< 1, (2)
где F1п, F2п - площадь сечения поршневых полостей соответственно цилиндров 9 и 10;
F1ш, F2ш - площадь сечения штоковых полостей соответственно цилиндров 9 и 10;
l1 - длина стрелы 2;
l2 - длина грузовой стрелы 7.
В случае, когда грузовые стрелы обоих грузовых звеньев жестко связаны ригелем, обеспечивается механическая синхронизация работы устройства, поэтому одноименные полости соответствующих цилиндров каждого грузового звена связаны между собой и запитываются от двух общих распределителей 12 и 13.
В транспортном положении стрелы 2 и грузовые стрелы 7 укладывают вдоль основания 1 в сторону, противоположную дополнительному рычагу 4, при этом штоки цилиндров 9 - 11 полностью выдвинуты. Для приведения в рабочее состояние распределителем 13 линии 14 и 15 подвода и слива рабочей среды соединяют соответственно с линиями 18 и 19, в результате чего штоки цилиндров 9 и 10 вдвинутся, при этом стрелы 2 повернутся в сторону дополнительных рычагов 4, а последние повернутся до упора в основание 1. Для захвата груза необходимо распределителем 12 соединить линии 14 и 15 соответственно с линиями 16 и 17, при этом шток цилиндра 11 вдвигаетcя, поворачивая грузовую стрелу 7 и подводя захватные органы 8 к месту строповки. После строповки груза распределителем 13 соединяют линии 18 и 19 соответственно с линиями 15 и 14 и рабочая среда подается в поршневые полости цилиндров 9 и 10.
Поршни цилиндров 10 выдвигают штоки и поворачивают связанные с ними стрелы 2, при этом штоки цилиндров 9 остаются неподвижны до полного выдвижения штоков цилиндров 10, так как выполняется условие >
>  .
.
После полного выдвижения штоков цилиндров 10 начинается перемещение поршней цилиндров 9, штоки которых поворачивают рычаги 4, в этом случае цилиндры 10 выполняют роль звеньев фиксированной длины и передают усилие на стрелу 2, продолжая их дальнейший поворот вокруг шарниров 3 до установки груза на основание 1. При необходимости в период подъема и перемещения груза, переключая распределитель 12, управляют работой цилиндров 11, которые поворачивают грузовые стрелы 7 относительно стрел 2, в результате чего изменяется требуемым образом траектория перемещения груза.
При съеме груза с основания 1 штоки цилиндров 10 выдвинуты полностью, а штоки цилиндров 9 находятся в промежуточном положении. Включают распределитель 13, соединив линии 14 и 15 соответственно с линиями 18 и 19, подавая рабочую среду в штоковые полости цилиндров 9 и 10. Поршни цилиндров 9 вдвигают штоки и поворачивают рычаги 4, при этом цилиндры 10 выполняют роль звена фиксированной длины, которые поворачивают стрелы 2 вокруг шарниров 3. Штоки цилиндров 10 начинают вдвигаться только после завершения втягивания штоков цилиндров 9, так как усилие, действующее на поршень в штоковой полости цилиндра 10, меньше, чем в цилиндре 9, что обусловлено соотношением < 1,
< 1,
таким образом продолжая поворот стрелы 2 до установки груза на разгрузочную площадку. В период перемещения и установки груза при необходимости, переключая распределитель 12, управляют цилиндрами 11, которые поворачивают грузовые стрелы 7 относительно стрел 2, необходимым образом изменяя траекторию перемещения груза.
В случае выполнения штока цилиндра 10 телескопическим, например двухступенчатым, последняя ступень является цилиндром одностороннего действия, т. е. при подаче рабочей среды в поршневую полость она выдвигается, а вдвигается под действием силы тяжести груза и стрелы. Такая работа цилиндров 10 обуславливается введением указанных соотношений площадей поршней цилиндров 9 и 10, обеспечивающих такие режимы их работы, когда цилиндры 10 работают только в том квадранте, где на них воздействуют сжимающие силы от веса груза и рабочих органов устройства.
По сравнению с прототипом предлагаемое решение позволяет расширить зону обслуживания за счет возможности переноса груза через опору стрелы, при этом снижаются энергозатраты за счет снижения давления и расходов рабочей среды в системе привода, что обусловлено использованием дополнительного рычага в совокупности с двумя цилиндрами с сообщающимися одноименными полостями. В этом случае рычаг выполняет роль задатчика траектории движения стрелы, увеличивая плечо момента и снижая необходимое рабочее усилие цилиндров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемное устройство | 1985 |
|
SU1312060A2 |
| СТРЕЛОВОЙ ПОВОРОТНЫЙ КРАН | 1991 |
|
RU2028270C1 |
| Грузоподъемное устройство | 1986 |
|
SU1439068A1 |
| Устройство для подъема крупногабаритных грузов | 1983 |
|
SU1194832A1 |
| Грузоподъемное устройство | 1989 |
|
SU1696376A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2061914C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| Ограничитель грузового момента гидравлической грузоподъемной машины | 1986 |
|
SU1416435A1 |
| ГИДРОПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2020 |
|
RU2733004C1 |
| Манипулятор с уравновешиванием груза | 1989 |
|
SU1705229A1 |
Использование: для установки тяжеловесных грузов на платформу. Сущность изобретения: дополнительный рычаг установлен относительно шарнира стрелы со стороны захватного органа. Штоковая и поршневая полости цилиндра грузовой стрелы сообщены с выходами первого распределителя. Штоковые полости цилиндров рычага и стрелы сообщены с другим выходом второго распределителя. Поршневая полость цилиндра рычага сообщена с поршневой полостью цилиндра стрелы. Второй грузоподъемный элемент установлен параллельно первому. Грузовые стрелы жестко связаны между собой. Одноименные полости соответствующих цилиндров обоих грузонесущих звеньев сообщены с двумя соответствующими распределителями. 1 з.п.ф-лы, 2 ил.
| Грузоподъемное устройство | 1984 |
|
SU1212919A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
