С/.
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Система управления уравновешивающим подъемником | 1984 |
|
SU1199738A2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| Адаптивный пневматический привод с обратной пневматической связью | 2018 |
|
RU2685167C1 |
| Устройство для налива жидкостей в цистерны | 1983 |
|
SU1142436A1 |
| Пневмопривод | 1989 |
|
SU1597452A1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2206691C1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ КЛАПАННЫЙ ПНЕВМОРАСПРЕДЕЛИТЕЛЬ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2178055C1 |
| Система управления пневматическим приводом прислонно-сдвижной двери пассажирского вагона | 2017 |
|
RU2661254C1 |
Изобретение относится к грузоподъемным механизмам и может быть использовано как подъемно-транспортное средство. Цель изобретения - повышение производительности. Манипулятор с уравновешиванием груза содержит стойку 1, шарнирно соединенную с ней стрелу, выполненную в оиде шарнирного параллелограмма с грузовым рычагом 4, несущим на конце грузозахватный орган 6, пневмоцилиндр 2 и систему управления с регулятором давления, пятилинейным распределителем 12, датчиками . веса 13 и обратной связи 15. Мембранный тормоз установлен нз корпусе датчика 15 обратной связи и соединен с атмосферой и источником пневмопитания через распределитель 12, причем надмембракная камэ- ра датчика обратной связи сообщена через распределитель с поршневой полостью пневмоцилиндра и атмосферой, а мембрана датчиков жестко связана с толкателями, установленными с возможностью взаимодействия друг с другом. 2 ил.
Изобретение; относится к грузоподъемным механизмам и может быть использовано как подъемно-транспортное средство.
Цель изобретения - повышение производительности.
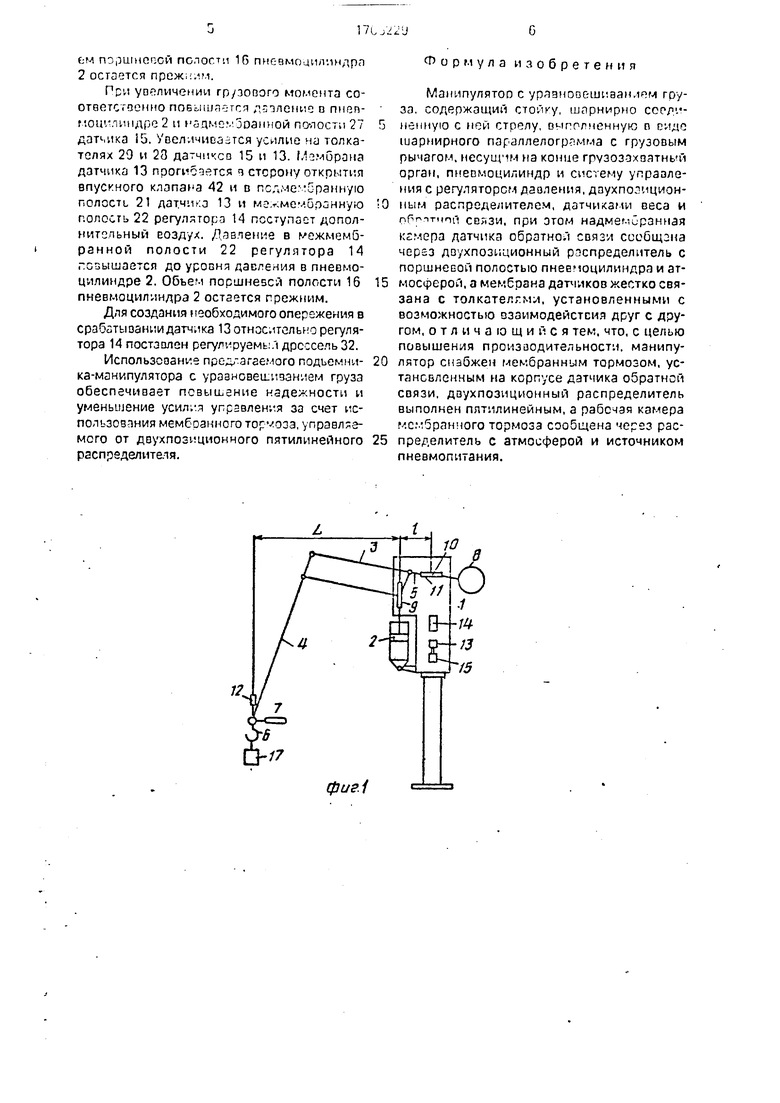
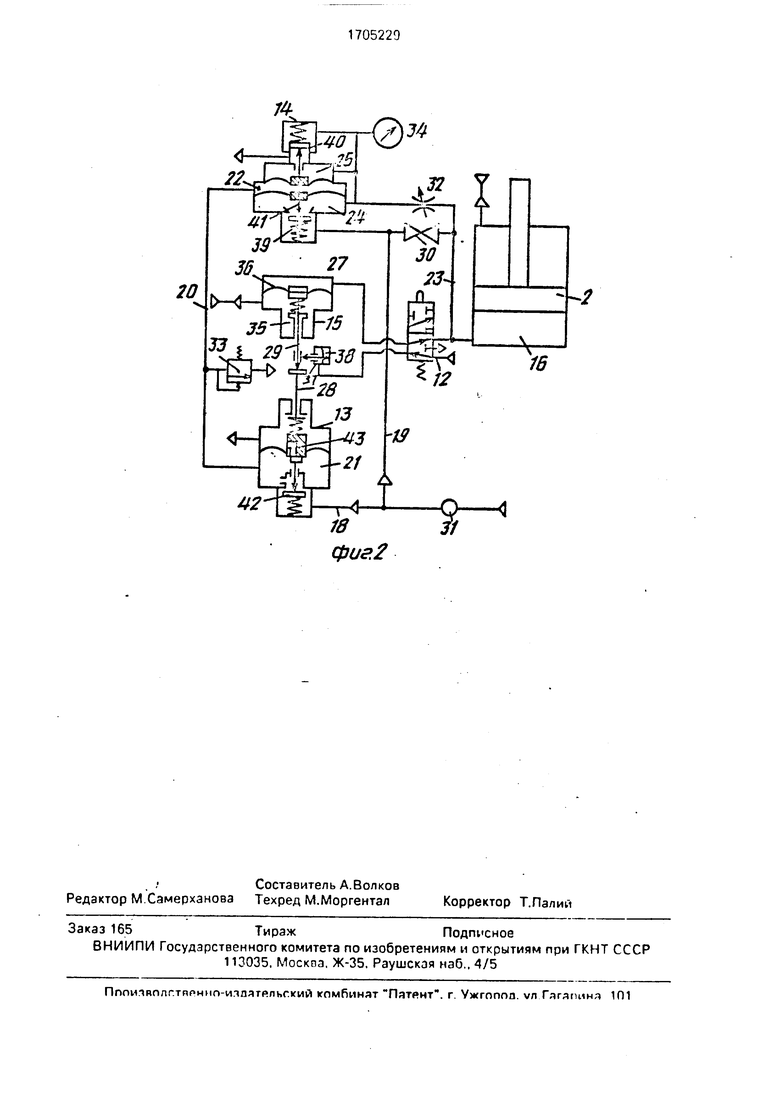
На фиг. 1 показан манипулятор с уравновешиванием груза; на фиг. 2 - система управления манипулятором.
Манипулятор содержит стойку 1, на которой шарнирно закреплены пневмоцилиндр 2 и грузовая стрела, выполненная в виде пантографного механизма 3 с грузовым рычагом 4 и противодействующим рычагом 5. На конце грузового рычага 4 закреплены грузозчхвзтный орган 6 и ручка 7 для управления движениями манипулятора, на рычаге 5 рззмещон противовес 8. Шток пнеомоцилиндра 2 соединен с грузовой
стрелой шарниром 9, рычаг 5 с помощью шарнира 10 имеет возможность перемещаться в горизонтальном пазу 11. Ручка 7 управления в зависимости от необходимого направления перемещения воздействует на двухпозиционный пятилинейный распределитель 12. На стойке размещены датчик 13 веса, регулятор 14 давления. дэтчик15 обратной связи, входящие в систему управления подъемником манипулятора. Поршневая полость 16 сообщена с распределителем 12. груз 17 крепится к грузозахватному органу 6. Пневмолинии 18,19,20 подключены к датчику 13 и регулятору U. пневмолиния 20 - к подмембрэнной полости 21 датчика 13 веса и межмембр-знной полости22 регулятора 14 давления, линия 23 - к лодмемПраннои no/iccv ., надмембранной полости 25 регулятора .
О
ел
.
i1 4- N2
О
п к-гмогиння 26 - к нпдмемОргшной поло- 27 датчика 15 обратной связи.
Тол (Толи 28 и 20 датчиков 13 и 15 установлены с возможностью взаимодействия др/г - л;-Угсм. Пневмолинии 19 и23сооище- ни между стбой через вентиль 30, пневмо- лииии 18 и 19 подключены к источнику 31 митпмия, дроссель 32 установлен между полостью 2м и пнеимолинией 23, к пмевмоли- liH .i 30 подключен предохранительный клапан 33, давление в полости 25 контролируется манометром 34, п датчике 15 выполнена подмембранная полость 35, мембрана 36 связана с толкателем 29. Полость 37 мембранного тормоза 38 подключена к распре- делите.ю 12. Регулятор 14 содержит впускной и выпускной клапаны 39 и 40, соединенные толкателем 41. Датчик 13 веса содержит ппускиой клапан 42. Датчик 13 веса содержит спускное отверстие 43.
Устройство работает следующим образом.
Создаш 1ый усилием на штоке пневмоцилин- дра 2 воздух заполняет надмембранную полост 27 датчика 15 обратной связи. Толкатель 29 датчика 15 обратной связи воздействует на толкатель 28 датчика 13 веса. В соответствии с создаваемым усилием открывается впускной клапан 42 датчика 13. воздух из пневмолинии 18 поступает в подмембрэн- ную полость 21 и межмембрзнную полость 22 регулятора 14. При выравнивании давления в межмембранной полости 22 с давлением в надмембранной 25 и подмембрзиной 24 полостях регулятор 14 приходит в равновесие, т.е. поступление и сброс воздуха прекращаются и вся система (дневюоцилиндр 2, надмембранная полость 27 датчика 15 обратной связи, подмембранная полость 21 датчика веса 13 залолнены воздухом.
Ручка 7 управления выполнена в виде шарппрно закрепленного рычага, одно плечо которого служит для перемещения стрелы, а другое нажимает на двухпозиционный пятилинейный распределитель 12. Распределитель 12 срабатывает при приложении к ручке 7 управления усилия вверх или вниз (в зависимости от необходимого направления движения) и остается в исходном (открытом) положении при приложении усилия к ручке 7 управления в любом горизонтальном направлении.
Для надежной фиксации уравновешенного состояния оператор, поворачивая руч- ку 7 управления, переключает двухпозиционный пятнлинейний распределитель 12, в результате чего воздух из полости 37 мембранного тормоза 38 поступает в атмосферу и тормоз 38 жестко фиксирует
положение толкателя 29 дэтчига оОрпшой связи 15.
При перемещении груза 17 опеох оператор уменьшает усилие на штс-:о пняпмоци- линдра 2. Давление в полости 16 пневмоцилимдра 2 уменьшается. Уменьшается давление о надмембранной и лодмом- бранной полостях 25 и 24 регулятора 14 давления, а давление в межмембрлнной полости 22 остается прежним. Толкатель 4 перемещается в сторону открытия впускного клапана 39. Впускной клапан 39 открывается и в полость 16 поступает дополнительный воздух. Происходит подъем поршня пневмоцилиндра 2 и соответственно подъем груза 17. При прекращении воздействия оператора на ручку 7 управления давление в полости 16 пневмоцилиндра 2 прежнее, а объем полости 16 увеличился.
При опускании груза 17 давление о полости 16 пнезмоцилиндра 2, в нздмембран- ной и подмембранной полостях 25 и 24 регулятора 14 увеличивается. Давление а межмембранной полости 22 остается прежним. Толкатель 41 регулятора 14 перемещается в сторону открытия выпускного клапана 40, что приводит к сбросу воздуха о атмосферу. При прекращении внешнего воздействия давление в полости 16 остается прежним, а объем поршневой полосги 16 пневмоцилиндра 2 уменьшается.
При горизонтальном перемещении стрелы в общем случае давление в полости 16 пневмоцилиндра 2 может изменяться за счет изменения величины грузового момента (центр масс груза 17 не совпадает с грузозахватным устройством). При горизонтальном ведении стрелы оператор прикладывает усилие к ручке 7 управления вправо или влево, не воздействуя на дзух- позиционный пятилинейный распределитель 12. Изменение давления в полости 16 пневмоцилиндра 2 передается в надмембранную полость 27 датчика 15 обратной связи. Толкатель 29 датчика 15 обратной связи воздействует на толкатель 28 датчика 13 веса. В случае понижения давления в пнесмо- цилиндре 2 соответственно понижается давление в надмембранной полости 27. Усилие на толкателях 29 и 28 датчика 15 и датчика 13 уменьшается. Прежнее давление а подмембрапной полости 21 датчика 13 и межмембранной полссти 22 регулятора 14 прогибает мембрану датчика 13 о сторону открытия спускного отверстия 43 датчика 13 и избыток давления из подмембранной и межмсмбраннсй полостей 21 и 22 шлется в атмосферу. Давление е межмембгг.н- ной полости22 регулятора 14 понижается ло уровня давления в пнсвмоцилиндре 2. Сиььм пэршнсасй полости 16 пнеамоцилпндрл 2 остается прежним.
При увеличении грузового момента со- ответстоемно повышается /v:nnenue D пнеп- моц илиндре 2 и надмемЗоанной по-лости 27 датчика 15. Увелнчиоаатся усилие на толкателях 29 и 23 датчиков 15 и 13. Мембрана датчика 13 прогибается п сторону открытия впускного клапана 42 и в псдме: бранную полость 21 датчика 13 и мехмсморанную полость 22 регулятора 14 поступает дополнительный воздух. Давление в межмемб- ранной полости 22 регулятора 14 повышается до уровня давления в пневмо- цилиндре 2. Обьем поршневой полости 16 пневмоцилиндра 2 остается прежним.
Для создания необходимого опережения в срабатывании датчика 13 относительно регулятора 14 постзолен регулируемый дроссель 32.
Использование предлагаемого подъемника-манипулятора с уравновешиванием груза обеспечивает повышение надежности и уменьшение усилил управления за счет использования мембранного Topvooa, управляемого от двухпозиционного пятилинейного распределите™.
фиг.1
5
0
5
Ф о р му л а изобретения
Манипулятор с уравновешиваниям груза, содержащий стойку, шарнирно соол1- - ненную с ней стрелу, оыпплненную п сиде шарнирного параллелограмма с грузовым рычагом, несущем на конце грузозахватный орган, пнесмоцилиндр и систему упраоле- ния с регулятором давления, даухпозмцион- ным распределителем, датчиками веса и прттмпй связи, при этом надмемОрзнная кгмера датчика обратной связи сообщзна через доухпозиционный распределитель с поршневой полостью пневмоцилиндра и атмосферой, а мембрана датчиков жестко связана с толкателями, установленными с возможностью ззаимодейстсия друг с другом, отличающийся тем. что, с целью повышения производительности, манипулятор снабжен мембранным тормозом, установленным на корпусе датчика обратной соязи, двухпозиционный распределитель выполнен плтилинейным, а рабочая камера мембранного тормоза сообщена через распределитель с атмосферой и источником пневмопитания.
10
в
20
33JL
тхч
L 3lЈ #
JIL
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
