Изобретение относится к подъемно- транспортному машиностроению и касается конструкции грузоподъемных устройств с подъемной стрелой, например автомобильных и гусеничных кранов, трубоукладчиков, а также специальных грузоподъемных устройств, преимущественно используемых при производстве монтажных работ в строительстве, в том числе при монтаже тяжеловесных крупногабаритных грузов, самостоятельных или в составе комплекса, состоящего из нескольких синхронно работающих грузоподъемных устройств.
Цель изобретения -улучшение эксплуатационных характеристик.
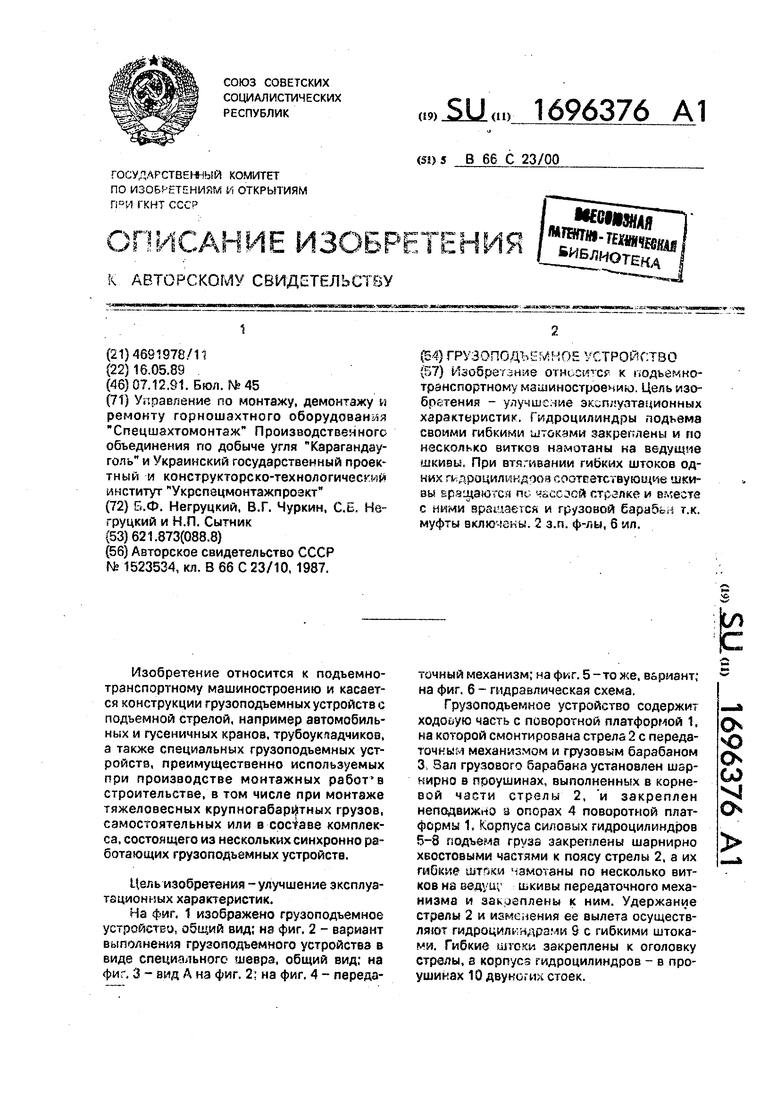
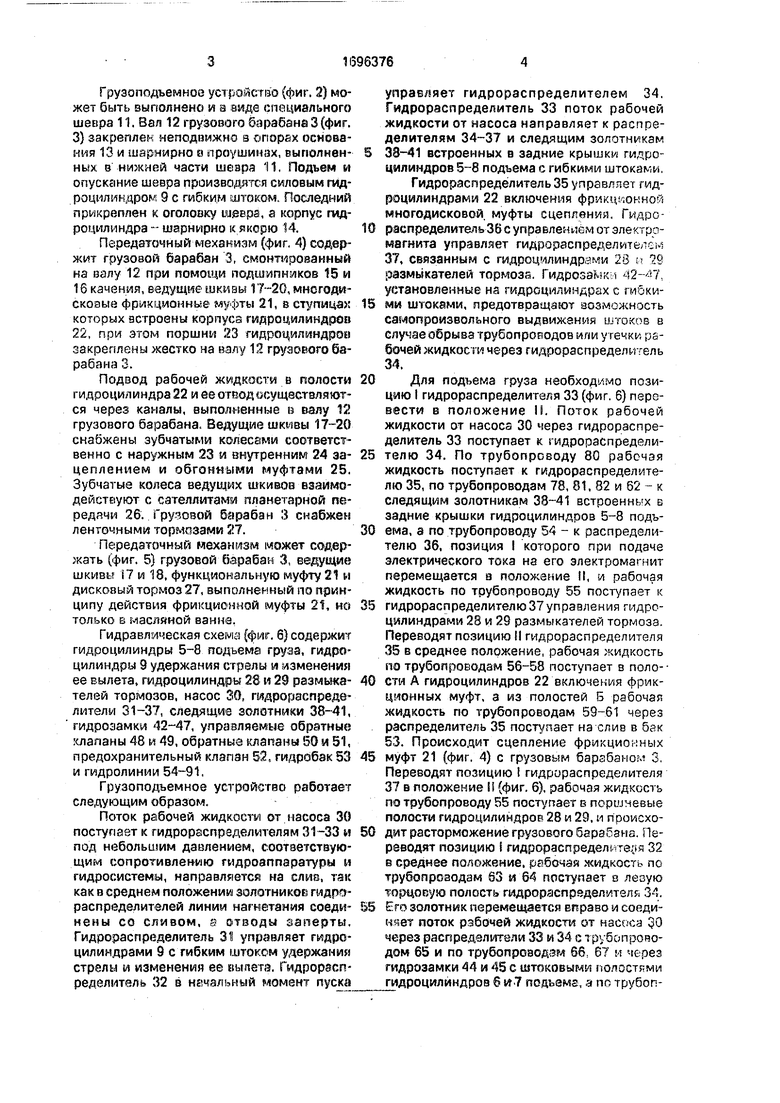
На фиг, 1 изображено грузоподъемное устройство, общий вид; на фиг. 2 - вариант выполнения грузоподъемного устройства в виде специального шевра, общий вид; на фиг, 3 - вид А на фиг. 2: на фиг. 4 - передаточный механизм; на фиг. 5 -то же. вариант; на фиг. 6 - гидравлическая схема.
Грузоподъемное устройство содержит ходооую часть с поворотной платформой 1, на которой смонтирована стрела 2 с передаточным механизмом и грузовым барабаном 3, Вал грузового барабана установлен шар- нирно в проушинах, выполненных в корневой части стрелы 2, и закреплен неподвижно з опорах 4 поворотной платформы 1, Корпуса силовых гидроцилиндров 5-8 подъема груза закреплены шарнирно хвостовыми частями к поясу стрелы 2, а их гибкие штоки чамотаны по несколько витков на ведут1 шкивы передаточного механизма и закреплены к ним. Удержание стрелы 2 и изменения ее вылета осуществляют гидроцил ндрзми 9 с гибкими штоками. Гибкие штоки закреплены к оголовку стрелы, з корпуса гидроцилиндров - в проушинах 10 двуногих стоек.
CN Ю О Ы V4 О
Грузоподъемное устройство (фиг. 2) может быть выполнено и а виде специального шевра 11. Вал 12 грузового барабана 3 (фиг. 3} закреплен неподвижно а опорах основания 13 и шарнирно в проушинах, выполненных в нижней части шевра 11, Подъем и опускание шевра производятся силовым гидроцилиндром 9 с гибким штоком. Последний прикреплен к оголовку шевра, а корпус гидроцилиндра - шарнирно ic якорю 14.
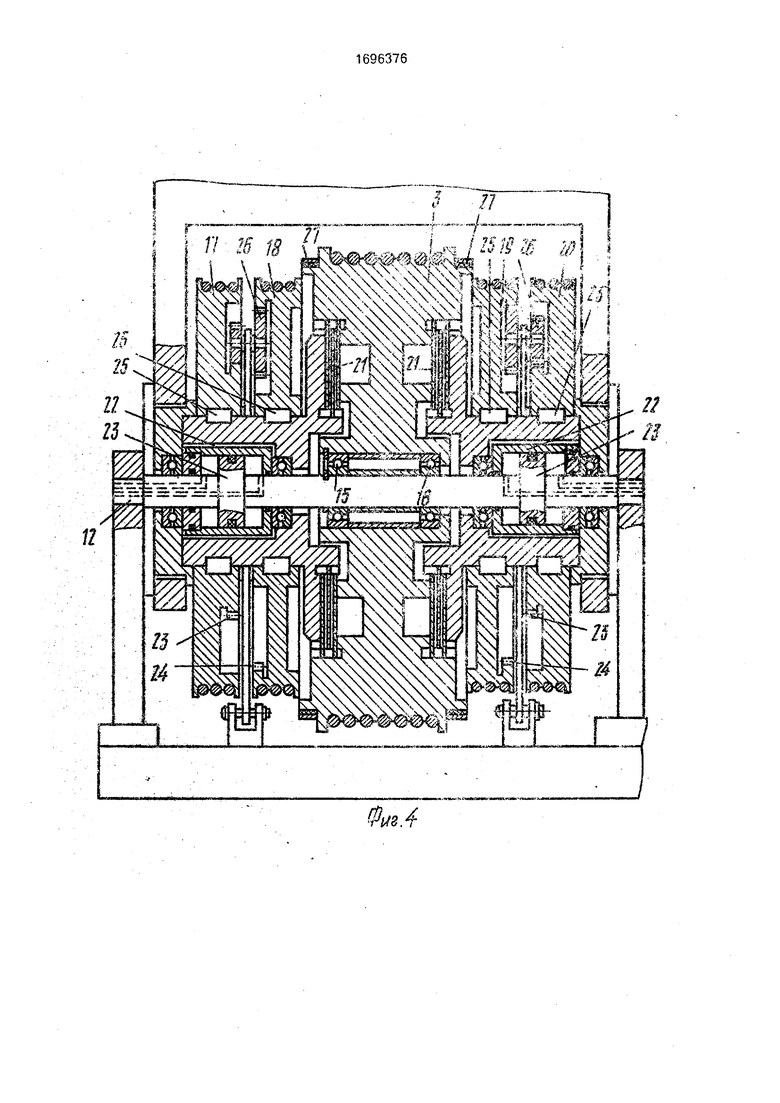
Передаточный механизм (фиг. 4) содержит грузовой барабан 3, смонтированный на валу 12 при помощи подшипников 15 и 16 качения, ведущие шкивы 17-20, многодисковые фракционные муфты 21, в ступицах которых встроены корпуса гидроцилиндров 22, при этом поршни 23 гидроцилиндрой закреплены жестко на валу 12 грузового барабана 3.
Подвод рабочей жидкости в полости гидроцилиндра 22 и ее отвод осуществляются через каналы, выполненные в валу 12 грузового барабана. Ведущие шкивы 17-20 снабжены зубчатыми колесами соответственно с наружным 23 и внутренним 24 зацеплением и обгонными муфтами 25. Зубчатые колеса ведущих шкивов взаимодействуют с сателлитами планетарной передачи 26. Грузовой барабан 3 снабжен ленточными тормозами 27.
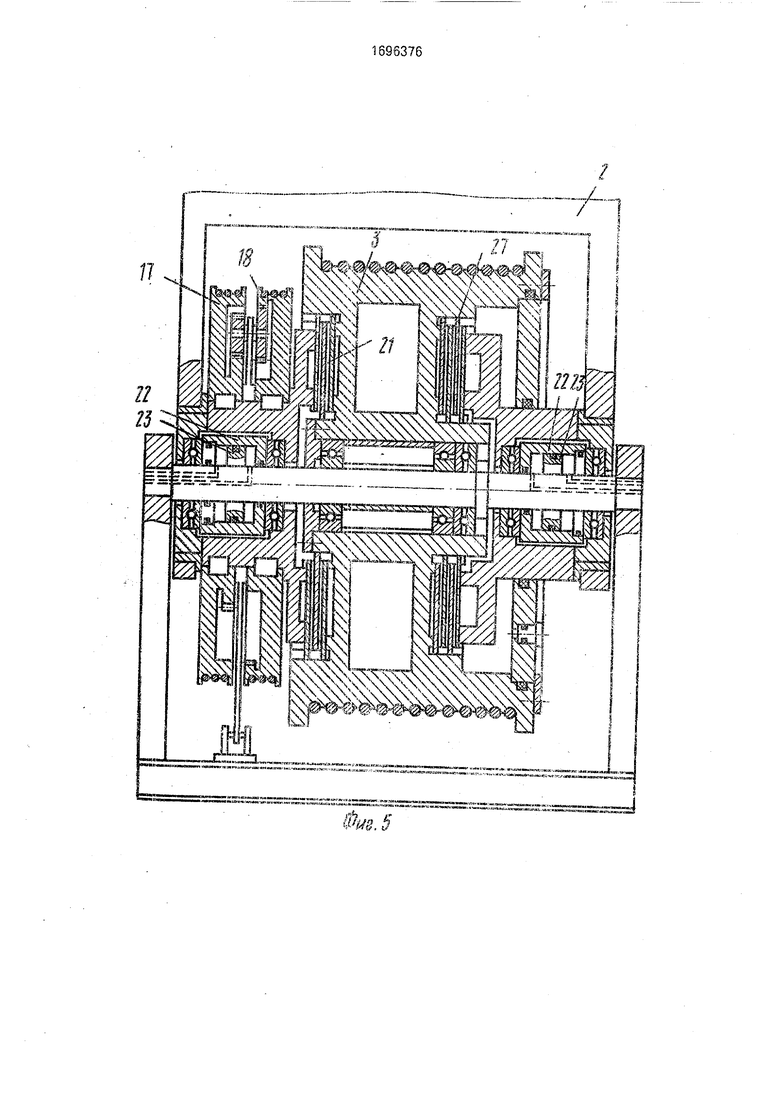
Передаточный механизм может содержать (фиг. 5) грузовой барабан 3, ведущие шкивы1 17 и 18, функциональную муфту 21 и дисковый тормоз 27, выполненный по принципу действия фрикционной муфты 21, но только в масляной ванне.
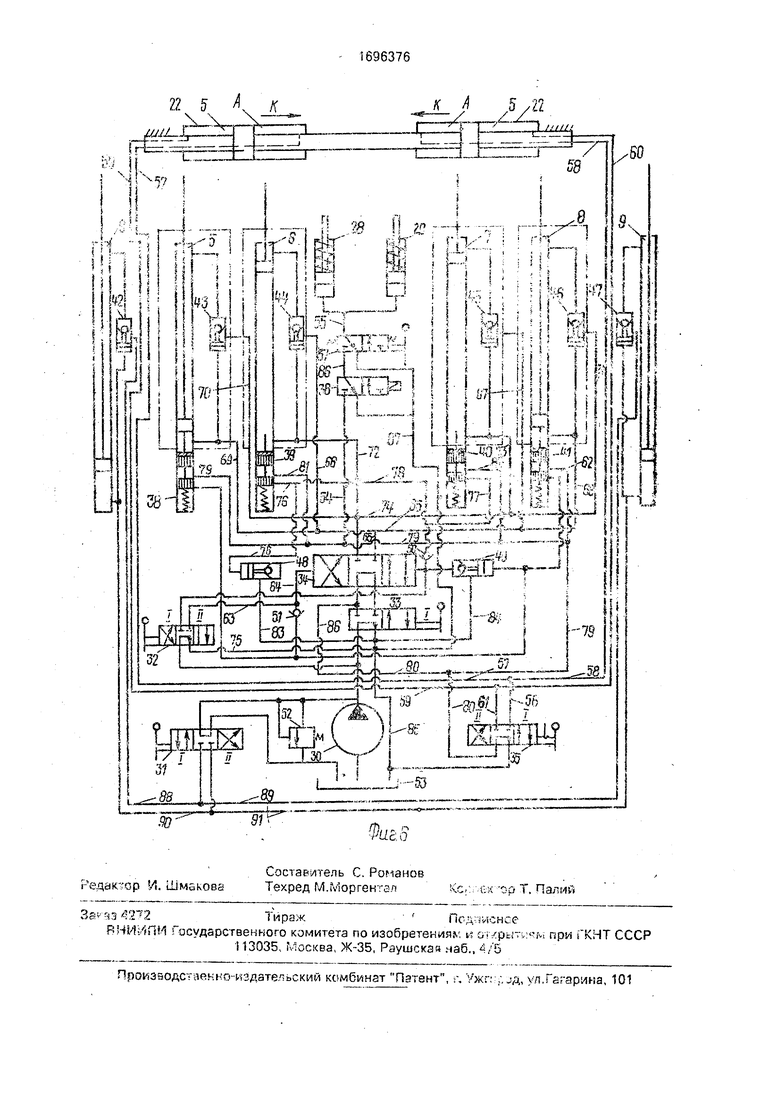
Гидравлическая схема (фиг. 6) содержит гидроцилиндры 5-8 подьема груза, гидро- цилиндры 9 удержания стрелы и изменения ее вылета, гидроцилиндры 28 и 29 размыкателей тормозов, насос 30, педрораспреде- лители 31-37, следящие золотники 38-41, гидрозамки 42-47, управляемые обратные клапаны 48 и 49, обратные клапаны 50 и 51, предохранительный клапан 52, гидробак 53 и гидролинии 54-91.
Грузоподъемное устройство работает следующим образом.
Поток рабочей жидкости от насоса 30 поступает к гидрораспределителям 31 -33 и под небольшим давлением, соответствующим сопротивлению гидроаппаратуры и гидросистемы, направляется на слип, так как в среднем положении золотников гидра- распределителей линии нагнетания соединены со сливом, а отводы заперты, Гидрораспределитель 31 управляет гидроцилиндрами 9 с гибким штоком удержания стрелы и изменения ее выпета. Гидрорэсп- ределитвль 32 в начальный момент пуска
управляет гидрораспределителем 34. Гидрораспределитель 33 поток рабочей жидкости от насоса направляет к распределителям 34-37 и следящим золотникам
38-41 встроенных в задние крышки гидроцилиндров 5-8 подъема с гибкими штоками, Гидрораспределитель 35 управляет гидроцилиндрами 22 включения фрикционной многодисковой муфты сцепления. Гидро0 распределитель 36 с управлением от электромагнита управляет парораспределителем 37, связанным с гидроцилиндр ми 28 29 размыкателей тормоза. ГидрозаК-к. i --$2- 7 установленные на гидроцилиндрах с гибки5 ми штоками, предотвращают возможность самопроизвольного выдвижения штоков в случае обрыва трубопроводов или у гечки рабочей жидкости через гидрораспредели-.-ель 34.
0 Для подъема груза необходимо позицию I гидрораспределителя 33 (фиг. 6) перевести в положение IS. Поток рабочей жидкости от насоса 30 через гидрораспределитель 33 поступает к гидрораспредели5 телю 34. По трубопроводу 80 рабочая жидкость поступает к гидрораспределителю 35, по трубопроводам 78, 81, 82 и 62 - к следящим золотникам 38-41 встроенных в задние крышки гидроцилиндров 5-8 подъ0 ема, а по трубопроводу 54 - к распределителю 36, позиция I которого при подаче электрического тока на его электромагнит перемещается в положение И, и рабочая жидкость по трубопроводу 55 поступает к
5 гидрораспределителю37управления гидроцилиндрами 28 и 29 размыкателей тормоза. Переводят позицию II гидрораспределителя 35 в среднее положение, рабочая жидкость по трубопроводам 56-58 поступает в поло-0 стм А гидроцилиндров 22 включения фрикционных муфт, а из полостей Б рабочая жидкость по трубопроводам 59-61 через распределитель 35 поступает на слив в бак 53. Происходит сцепление фрикционных
5 муфт 21 (фиг. 4) с грузовым барабаном 3, Переводят позицию I гидрораспределителя 37 в положение Н (фиг. 6), рабочая жидкость по трубопроводу 55 поступает в поршневые полости гидроцилиндрор 28 и 29, и пооисхо0 дит расторможение грузового барабана. Переводят позицию I гидрораспре деляге; я 32 в среднее положение, рабочая жидкости по трубопроводам 63 и 64 поступает в леаую торцовую полость гидрораспрэделитель 34.
5 Его золотник перемещается вправо и соединяет поток рабочей жидкости от насоса 30 через распределители 33 и 34 с трубопроводом 65 и по трубопровод; 66 6 « через гидрозамки 44 и 45 с штоковыми полостями гидроцилиндров б и 7 подъеме, а пп трубопроводам 68 и 69 - с поршневыми полостями гидроцилиндров 8 и 5 подъема. При этом рабочая жидкость из штоковых полостей гидроцилиндров 5 и 8 через гидрозамки 43, 46 и по трубопроводам 70 и 71, э также из поршнеэых полостей гидроцилиндров 6 и 7 по трубопроводам 72-74 поступает через гидрооаспреьелители 34 и 33 на елка в бак 53.
Гил, оч.илиндры 5-8 подъема своими гибким uijroKSMH закреплены и по несколько 31/г, -ое намс-таны соответственно пз ведущие IL-КИВЫ 17-20 (фиг. -1), при втягичании гибких штокоз внутрь гидроц ллпндров б л шкивы 18 м 19 вращаются по часовой стрел е и вместе с ними вращается и грузовой барабан 3, тек как фрикционные муфты 1 включены, я они кинематически связ&ж обгонныэ муфты 25 с ведущими шки вами, При этом рабочая жидкость по указан- ным трубопроводам и через обратный клапан 50 поступает в правую торцовую полость гидрораспределителя 34, а также в поршневую полость управляемого обратного клапана 48. Золотник распределителя 34 перемещается влево, его позиция II занимает среднее положение и соединяет насос З ч с поршневыми полостями гидроцилиндрои 6 и 7 подъема трубопроводами 74, 72 и 7Г, i со штоковыми полостями гидроцмлинцроз 5 и 8 подъема трубопроводами 70 и 1 чзрез гидрозамки 43 и 46. Рабочая жидкость из штоковых полостей гидроцилиндров 6 и 7 и поршневых полостей гидроцилиндров 5 и 8 соответственно по трубопроводам 69, 68, 67 и 68 поступает на слив по трубопроводу 65, через распределители 34, 33 и трубопровод 85. Рабочая жидкость из левой торцовой полости гидрораспределителя 34 поступает на слив в бак 53 через управляемый обрат- ный клапан 48 и трубопроводы 83 и 85. В таком автоматическом режиме подъем груза происходит до тех пор, пока не будет прерван поток рабочей жидкости от насоса распределителем 33 перемещением его по- зиции I вправо. В случае прорыва трубопровода или прекращения подачи цилиндров 28 и 29 размыкателя тормоза рабочая жидкость поступает на слив через распределитель 37, трубопровод 86, распределитель 36, трубопроводы 87 и 85, и грузовой бара- б.чн тормозится.
Для изменения вылета стрелы включают в: работу гидроцилиндры 9 с гибким штоком при помощи гидрораспределителя 31. Переводом его позиций, |, и Б среднее положение производят подъем или опускание стрелы. Рабочая жидкость по трубопроводам 88-91, поступает в соответствующие полости гидроцилиндров 9.
Для ускоренного опускания навесного оборудования типа рыхлитель после подь- ема его на соответствующую высоту распределителем 35 полностью выключают муфты 21 сцепления переводом его позиции I в среднее положение. Рабочая жидкость по трубопроводам 61, 59 и 60 поступает в полости Б гидроцилиндров 22, а из полостей А гидроцилиндров рабочая жидкость по трубопроводами 58, 59 и 56 через распределитель поступает нз слив в 5а;: 53. Рыхлитель совершает слсподное падение. При необходимости барабан может притормаживаться тормозами 27 при помощи гидпоцилиндроа 28, 29 или s комбинации с фракционными муфгами 21, котог-ые мсгут быть полностью не отключены.
Форму з изобретения
1.Грузоподъемное vсвойство, есдер- хащее стрелу установленную на основании с возможностью принудительного поворота s вертикальной плоскости, ч механизм подъема rpv за, включающий в себя запасо- вачный Б обводной блок оголовка стрелы и соединенный с грузозахватным органом гибкий грузовой Элемент и связанный с по- :ле,г м сзоим г бчи« штокам мдрбцм- лиил устансп ючный пл стреле вцоль нее, о т л ч ч а ю i j, с е с f тем, что, с целью улучшения эксплуатационные характеристик, механизм подъема груза включает з себя агорой гидроцилиндр с гибким штоком, смонтированный на стреле параллельно первому, связанный с основанием л расположенный параллельно ocs- поворота стрелы вал, установленные на нем с возможностью сращения и связанные между собой посредством управляемой дисковой фрикционной муфты втулку и грузовой бара- бэн, в который запасован гибкий грузовой элемент, установленные на указанной втулке посредством обгонных муфт шкивы, в которые запасованы гибкие штоки соответствующих гидруцилиндров, и планетарный редуктор, солнечная шестерня которого жестко-связана с одним шкивом, эпицикл - с другим шкивом, водило - с основанием, а сателлиты выполнены двухшестеренчэтыми и их шестерки установлены с возможностью зацепления соответственно с солнечной шестерней и эпициклом.
2.Устройстно по п. 1, о т л и ч а ю щ е е- с я тем, что механизм подъема груза включает в себя до .мнительные гидроцилиндры с гибкими штоками шкивы, втулку и планетарный редуктор, устанорленные по другую сторону от барабана аналогично указанным.
3.Устройс 1 зо пс п, 1, о т л и ч а ю щ е е- с я тем, что передаточное отношение планетарного редуктора равно 1.
Ј Zl
Ггщ
cz...1.
Ј
//
re7
,
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2230020C1 |
| ГИДРОПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2020 |
|
RU2733004C1 |
| Гидропривод грузовой лебедки стрелового крана | 1984 |
|
SU1294760A1 |
| Гидросистема грузоподъемного устройства | 1988 |
|
SU1708753A1 |
| Шахтный гидравлический подъемник | 1989 |
|
SU1654213A1 |
| ГИДРОПРИВОД КРАНА (ВАРИАНТЫ) | 1998 |
|
RU2140388C1 |
| Гидропривод грузовой лебедки стрелового самоходного крана | 1979 |
|
SU867852A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| Подъемное устройство | 1986 |
|
SU1368249A1 |
| Кран грузоподъемный | 2022 |
|
RU2790730C1 |
9AE9691
9АС9691
со г- со
со
о to
1 vf f
s fci.I
ГТ. ° «тIri Pd tH. LL.
MILif л p И
l :гг;, , t ,p; ;J:eJH Ш
i f, «jKr wv i - т i Л1 iМП
i ш-i -r-1if i: i Lik i
ii
j-i чн iii i
-tH lUjr- , I ; uf- ,{ jl
i
Ш
b
79
63
,-«ii
/0
ijfei.V -- ViT r i. IS
.« -i t ,„„-, Д(j ( . ™ j t
1t
H{ .,, хЧ
.да
fH-f
И, i
y. - ff f- --
.IS
вдп
G
:Ж.
4ISJ
6Э
mДП7 F rjiUj J. J i
PJZI A «-i j i r.
J3,
хлдь-и i LTT
«--A. jf - -i i 35
ГЙГя« эйш -
i
-18
32
ttHS
К А 5/22
ш
MP7
lUjr- , I ; uf- ,{ jl
i
Ш
i / i Ч I1
, ) J, ,™-{V« . I I -ч .
ijfei. ViT r i. IS
t ,„„-, Д(j ( . ™ j t
t
{ .,, хЧ
И, i
y. - ff f- --
Hi
|VlJ
i
-18
.„ -.У;.I eo
,3tLl
ЬаЖ h
&
j
UiijT u ifcy
--
| Грузоподъемное устройство | 1987 |
|
SU1523534A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
