Изобретение относится к системам автоматического управления летательными аппаратами и может быть использовано, в частности, для формирования сигнала управления курсом малогабаритного дистанционно пилотируемого летательного аппарата (МДПЛА).
Известно устройство для автоматического определения направления на север, в котором магнитный чувствительный элемент расположен на стабилизированной в горизонтальной плоскости платформе. Угол отклонения от направления на север в нем определяется, как арктангенс отношения напряжений, подаваемых на моментные датчики с учетом выбранного с помощью логической схемы квадранта. В этом устройстве отсутствует схема устранения магнитных девиаций, что приводит к большим ошибкам в сигнале угла отклонения от заданного курса.
Наиболее близким техническим решением является курсовая система, содержащая два магнитных зонда, установленных на гировертикали с маятниковой коррекцией, генератор, выход которого соединен с обмотками возбуждения магнитных зондов и с входом блока возведения в квадрат, устройство устранения девиации, выполненное в виде двух синхронных детекторов, двух сумматоров, четырех блоков масштабирования сигналов, блока вычитания, трех регулируемых источников постоянного сигнала, источника заданного курса и двух блоков умножения, причем выход блока возведения в квадрат подключен к первым входам синхронных детекторов, вторые входы которых подключены к сигнальным обмоткам соответствующих магнитных зондов, а выходы детекторов - к первым входам первого и второго сумматоров соответственно, при этом второй и третий входы первого сумматора подключены соответственно к выходам первого регулируемого источника постоянного тока и первого блока масштабирования, вход которого подключен к выходу второго блока масштабирования, второй и третий входы второго сумматора подключены соответственно к выводам второго регулируемого источника постоянного сигнала и третьего блока масштабирования, вход которого подключен к выходу четвертого блока масштабирования, выходы первого и второго сумматоров соединены соответственно с входами четвертого и второго блоков масштабирования, выходы которых соответственно через первый и второй блоки умножения подключены к первому и второму входам блока вычитания, при этом выход третьего регулируемого источника постоянного сигнала подключен к третьему входу блока вычитания, а вторые входы блока умножения подключены к соответствующим выходам источника заданного курса.
Известное устройство определяет курс объекта, на котором оно установлено (МДПЛА) по значениям сигналов, пропорциональных синусу и косинусу текущего угла магнитного курса (угла отклонения от направления на север). Однако амплитуда этих сигналов зависит от широты местности, над которой находится объект, так как значение горизонтальной составляющей магнитного поля Земли изменяется от максимальных значений на юге до минимальных на севере. Поскольку объект может в зависимости от ситуации находиться на одних или других широтах, необходимо, чтобы амплитуда сигналов sinΨтекиcosΨтекнаходилась в пределах динамического диапазона блоков масштабирования (исходя из существующей элементной базы). Поэтому амплитуды сигналов sinΨтекиcosΨтек в области средних широт выбираются равными 5 В (что соответствует крутизне 1,4 мв/угл.мин). Следовательно, в южных широтах амплитуда не превысит 10 в (крутизна 2,8 мв/угл.мин), а в северных широтах снижается до 2,5 В (крутизна 0,7 мв/угл.мин).
Таким образом недостатком известного устройства является зависимость крутизны сигналов, определяющих курс, от широты, и следовательно, зависит от широты точность определения магнитного курса, что приводит к существенному ограничению по применению в области высоких широт. В известном устройстве сигналы sinΨтекиcosΨтек непосредственно используются для реализации функции:
sin(Ψзад-Ψтек)=sinΨзадx
xcosΨтек-cosΨзад˙sinΨтек в соответствии с которой осуществляется стабилизация и управление МДПЛА по курсу. Очевидно, что при фиксированной ошибке перемножения в блоках умножения снижение крутизны сигналов текущего курса увеличивает ошибку.
Целью изобретения является повышение точности определения текущего угла магнитного курса и расширение области применения курсовой системы до высоких широт.
Цель достигается тем, что крутизна сигналов, пропорциональных синусу и косинусу текущего угла, нормируется в области от экватора до высоких широт, что позволяет при изменении широты соответствующим образом изменять коэффициенты передачи в каналах синуса и косинуса текущего угла, поддерживая крутизну постоянной.
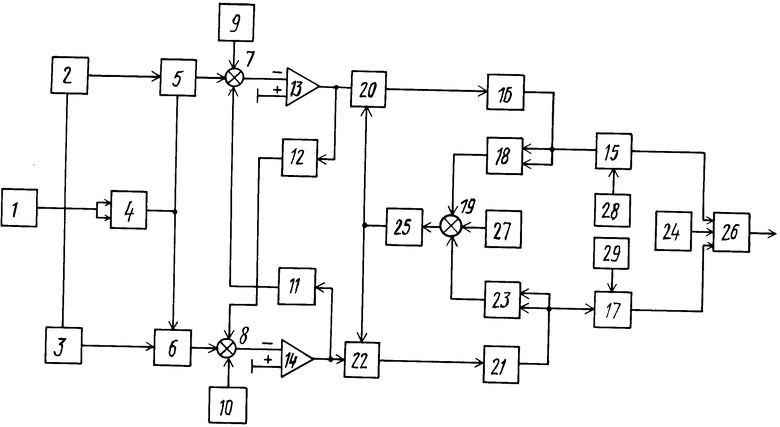
На чертеже представлена блок-схема курсовой системы, где:
1 - генератор;
2, 3 - первый и второй магнитные зонды;
4 - первый блок возведения в квадрат;
5, 6 - первый и второй синхронные детекторы;
7, 8 - первый и второй сумматоры;
9, 10 - первый и второй регулируемые источники постоянного сигнала;
11, 12 - первый и второй блоки масштабирования;
13, 14 - третий и четвертый блоки масштабирования;
15 - первый блок умножения;
16 - пятый блок масштабирования;
17 - второй блок умножения;
18 - второй блок возведения в квадрат;
19 - третий сумматор;
20 - третий блок умножения;
21 - шестой блок масштабирования;
22 - четвертый блок умножения;
23 - третий блок возведения в квадрат;
24 - третий регулируемый источник постоянного сигнала;
25 - интегратор;
26 - блок вычитания;
27 - четвертый регулируемый источник постоянного сигнала;
28 - блок задания косинуса заданного курса;
29 - блок задания синуса заданного курса.
Цель достигается тем, что в курсовую систему, содержащую два магнитных зонда, установленных на стабилизированной в горизонтальной плоскости платформе (гировертикали с маятниковой корреляцией), генератор, выход которого подключен к обмоткам возбуждения магнитных зондов и к входам блока возведения в квадрат, устройство устранения девиации, выполненное в виде двух синхронных детекторов, двух сумматоров, четырех блоков масштабирования сигналов, блоков задания синуса и косинуса заданного курса, трех регулируемых источников постоянного сигнала, блока вычитания и двух блоков умножения, причем выход блока возведения в квадрат подключен к первым входам синхронных детекторов, вторые входы которых соединены с сигнальными обмотками соответствующих магнитных зондов, а выходы детекторов - с первыми входами первого и второго сумматоров соответственно, второй и третий входы первого сумматора подключены к выходам первого регулируемого источника постоянного сигнала и первого блока масштабирования, второй и третий входы второго сумматора подключены к выходам второго регулируемого источника постоянного сигнала и третьего блока масштабирования, вход первого блока масштабирования соединен с выходом второго блока масштабирования сигнала, а вход третьего блока масштабирования - с выходом четвертого блока масштабирования сигнала, выходы первого и второго сумматоров подключены соответственно к входам четвертого и второго блоков масштабирования, выходы первого и второго блоков умножения соединены с первым и вторым входами блока вычитания, выход третьего регулируемого источника постоянного сигнала подключен к третьему входу блока вычитания, а вторые входы первого и второго блоков умножения соединены соответственно с выходами блоков задания косинуса и синуса заданного курса, введены третий и четвертый блоки умножения, пятый и шестой блоки масштабирования сигнала, второй и третий блоки возведения в квадрат, четвертый регулируемый источник постоянного сигнала, третий сумматор и интегратор, на первые входы третьего и четвертого блоков умножения подаются сигналы соответственно с выходов четвертого и второго блоков масштабирования, выход третьего блока умножения подключен к входу пятого блока масштабирования, с выхода которого сигнал подается на первый вход первого блока умножения и на входы второго блока возведения в квадрат, выход второго блока возведения в квадрат соединен с вторым входом третьего сумматора, выход четвертого блока умножения подключен к входу шестого блока масштабирования сигнала, выход которого соединен с первым входом второго блока умножения и входами третьего блока возведения в квадрат, выход третьего блока возведения в квадрат соединен с третьим входом третьего сумматора, на первый вход которого подается сигнал с выхода четвертого регулируемого источника постоянного сигнала, выход третьего сумматора соединен с входом инвертирующего сигнал интегратора, выход интегратора подключен к вторым входам третьего и четвертого блоков умножения.
Курсовая система работает следующим образом.
Магнитные зонды 2, 3, расположенные перпендикулярно друг другу, стабилизированы в плоскости горизонта при помощи гировертикали с маятниковой коррекцией и являются чувствительными элементами для определения магнитного курса. Обмотки возбуждения магнитных зондов 2, 3 запитываются переменным напряжением, частотой f от генератора 1, которое также подается на первый блок 4 возведения в квадрат, выполняющий функцию удвоителя частоты. Его выходное напряжение частотой 2f в качестве опорного поступает на соответствующие входы синхронных детекторов 5, 6, настроенных на частоте 2f. Полезные сигналы частотой 2f с сигнальных обмоток магнитных зондов 2, 3 поступают на вторые входы соответствующих синхронных детекторов 5, 6, на выходах которых имеется постоянное напряжение, пропорциональное соответственно синусу и косинусу текущего угла. Синхронные детекторы 5, 6 вместе с сумматорами 7, 8, первым 11, вторым 12, третьим 13 и четвертым 14 блоками масштабирования сигнала, а также первым и вторым регулируемыми источниками 9, 10 постоянного сигнала служат для устранения полукруговой и постоянной девиации в сигналахUϕsinΨтекиUϕcosΨтек, получаемых на выходах соответственно четвертого 14 и второго 12 блоков масштабирования.
В заявленном устройстве в синусном канале сигнал UϕsinΨтек через последовательно соединенные третий блок 20 умножения и пятый блок 16 масштабирования подается на входы второго блока 18 возведения в квадрат, с выхода которого сигнал, пропорциональный sin2Ψтек , поступает на второй вход третьего сумматора 19. В косинусном канале сигнал UϕcosΨтек через четвертый блок 22 умножения и шестой блок 21 масштабирования подается на входы третьего блока 23 возведения в квадрат, с выхода которого сигнал, пропорциональный cos2 Ψтек, подается на третий вход сумматора 19. Обозначают сигнал на выходах пятого блока 16 масштабирования и шестого блока 21 масштабирования соответственно AsinΨтекиAcosΨтек.
В устройстве используется известное тригонометрическое соотношение sin2Ψ+cos2Ψ=1.
Исходя из того, что сумма квадратов всегда положительна, на первый вход сумматора 19 подается постоянное напряжение отрицательной полярности от четвертого регулируемого источника 27 постоянного сигнала, величина которого устанавливается равной А2.
Таким образом на выходе инвертирующего сигнал интегратора 25 устанавливается напряжение, при помощи которого можно автоматически регулировать одновременно коэффициенты передачи синусного и косинусного каналов при изменении внешнего магнитного поля.
Сумматор 19 и интегратор 25 выполнены на одном операционном усилителе, и его выходное напряжение инвертируется по отношению к входу. Таким образом получена замкнутая система автоматического регулирования, астатическая за счет введения интегратора с астатизмом первого порядка. Такая система автоматического регулирования устойчива на основании известных критериев устойчивости.
При изменении курса на одной широте напряжение на выходе интегратора 25 не изменяется, так как постоянна сумма квадратов сигналов AsinΨтекиAcosΨтек, и, следовательно, коэффициент передачи каждого из каналов не изменяется. При изменении внешнего магнитного поля (широты) изменяется и амплитуда сигналов UϕsinΨтекиUϕcosΨтексоответственно, на выходах блоков 14, 12 масштабирования. Пропорционально этому изменению изменяется и сумма квадратов сигналов на втором и третьем входах третьего сумматора 19 и, следовательно, изменяется напряжение Uн на выходе инвертирующего сигнал интегратора 25, что приводит к пропорциональному изменению коэффициентов передачи каналов, так как выходное напряжение интегратора 25 в качестве одного из сомножителей подается на вторые входы третьего и четвертого блоков 20 и 22 умножения. В результате амплитуда сигналов на выходах блоков 16, 21 масштабирования на изменение внешнего магнитного поля от широты не реагирует и остается равной А в диапазоне от экватора до высоких широт.
Таким образом введение в курсовую систему блоков 20, 22 умножения, блоков 16, 21 масштабирования сигналов, блоков 18, 23 возведения в квадрат, регулируемого источника 27 постоянного сигнала, сумматора 19 и инвертирующего сигнал интегратора 25 позволяет увеличить точность определения текущего угла магнитного курса на тех широтах, на которых в известной системе крутизна была ниже, а также расширяет область применения курсовой системы до высоких широт.
В заявляемой курсовой системе снижается также ошибка в сигнале sin(Ψзад-Ψтек), предназначенном для стабилизации и управлении МДПЛА по азимуту.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для подготовки яхтсменов | 1987 |
|
SU1515184A1 |
| Устройство для виброиспытаний | 1986 |
|
SU1366897A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2193754C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИИ БОРТОВОГО НАВЕДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2136034C1 |
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ СТОЯНОЧНОГО КУРСА ГИДРОСАМОЛЕТА НА ПОВЕРХНОСТИ МОРЯ | 1990 |
|
SU1835933A1 |
| ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 1995 |
|
RU2087866C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| Измеритель местоположения бурового судна | 1983 |
|
SU1134928A1 |
Изобретение относится к автоматическому управлению летательными аппаратами, в частности к системам формирования сигнала управления курсом малогабаритного дистанционно пилотируемого летательного аппарата (МДПЛА). Целью изобретения является увеличение точности определения магнитного курса и расширение области применения курсовой системы до высоких широт. В систему дополнительно вводят последовательно соединенные четвертый регулируемый источник постоянного сигнала, третий сумматор и интергратор, последовательно соединенные третий блок умножения, пятый блок масштабирования и второй блок возведения в квадрат, последовательно соединенные четвертый блок умножения, шестой блок масштабирования и третий блок возведения в квадрат. 1 ил.
КУРСОВАЯ СИСТЕМА, содержащая два магнитных зонда, установленных на гировертикали с маятниковой коррекцией, генератор, выход которого соединен с обмотками возбуждения магнитных зондов, блок возведения в квадрат, вход которого соединен с выходом генератора, устройство устранения девиации, выполненное в виде первого и второго синхронных детекторов, первого и второго сумматоров, первого, второго, третьего и четвертого блоков масштабирования, первого, второго и третьего регулируемых источников постоянного сигнала, блока вычитания, первого и второго блоков умножения, блока задания синуса заданного курса и блока задания косинуса заданного курса, при этом выход блока возведения в квадрат соединен соответственно с первыми входами первого и второго синхронных детекторов, вторые входы которых соединены соответственно с магнитными зондами, а выходы первого и второго синхронных детекторов соединены соответственно с первыми входами первого и второго сумматоров, второй и третий входы первого сумматора соединены соответственно с выходами первого регулируемого источника постоянного сигнала и первого блока масштабирования, второй и третий входы второго сумматора соединены соответственно с выходами второго регулируемого источника постоянного сигнала и выходом третьего блока масштабирования, вход которого соединен с выходом четвертого блока масштабирования, выходы первого и второго сумматоров соединены соответственно с входами четвертого и второго блоков масштабирования, выходы первого и второго блоков умножения соединены соответственно с первым и вторым входами блока вычитания, третий вход которого соединен с выходом третьего регулируемого источника постоянного сигнала, вторые входы первого и второго блоков умножения соединены соответственно с выходами блока задания косинуса заданного курса и блока задания синуса заданного курса, отличающаяся тем, что, с целью увеличения точности определения магнитного курса и расширения области применения курсовой системы до высоких широт, в нее дополнительно введены последовательно соединенные четвертый регулируемый источник постоянного сигнала, третий сумматор и интегратор, последовательно соединенные третий блок умножения, пятый блок масштабирования и второй блок возведения в квадрат, выход которого соединен с вторым входом третьего сумматора, последовательно соединенные четвертый блок умножения, шестой блок масштабирования и третий блок возведения в квадрат, выход которого соединен с третьим входом третьего сумматора, выход интегратора соединен соответственно с вторыми входами третьего и четвертого блоков умножения, выходы пятого и шестого блоков масштабирования соединены соответственно с входами первого и второго блоков умножения, выходы четвертого и второго блоков масштабирования соединены соответственно с первыми входами третьего и четвертого блоков умножения.
| Авторское свидетельство СССР N 230461, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
