Изобретение относится к робототехнике, а именно к захватным устройствам манипуляторов и может быть использовано в различных отраслях машиностроения.
Известна захватная головка, в которой рычаги схвата установлены с возможностью движения от гидроцилиндра во взаимопротивоположных направлениях, корпус гидроцилиндра закреплен на одном из рычагов, который пружиной поджимается к упору в раскрытом положении схвата, при этом в зажатом положении схвата другой рычаг взаимодействует со вторым упором. Недостатком этой головки является то, что при зажиме детали переменного размера происходит ее прижатие к базовым элементам спутника, а отсюда возникновение добавочных напряжений в руке робота и увод руки,
при этом изменяется положение перемещаемой детали после съема со спутника относительно руки. Кроме того, при разжиме пакета деталей, установленных на спутнике, после его переориентации (например кантование на 180°) верхний рычаг схвата остается на пакете деталей и при отводе руки может повредить детали или нарушить их ориентацию.
Известен принятый за прототип двух- захватный механизм, содержащий корпус, в котором размещены свободно перемещаемые соосно подпружиненные между собой втулки с губками, причем одна из втулок выполнена в виде корпуса одностороннего силового цилиндра, шток которого жестко соединен со второй втулкой. Корпус выполнен с торцовым (центральным) упором, к
VJ
ON
Ј ON СО
которому под действием массы втулок, губок и шток-поршня при центрировании захвата по линии центров обслуживающего станка прилегает торцом втулка - силовой цилиндр.
Недостатком этого захватного механизма является нерегулируемость ориентации схвата относительно центров обслуживаемого станка, нерегулируемое изменение ориентации схвата после его переориентации, например на 180°, невозможность зажима деталей переменных размеров с сохранением ориентации указанных деталей относительно центров обслуживаемого станка. При захвате деталей, зажатых в центрах станка, вследствие погрешности базирования детали и схвата неизбежен либо прижим втулок схвата к торцовому упору, либо появление зазора между ними, что приводит либо к напряжениям в руке автооператора и ее уводу, либо к неконтролируемому изменению базировки детали относительно руки в момент переноса, а все вместе - к снижению точности позиционирования автооператора.
Целю изобретения является расширение технологических возможностей и повышение надежности работы, особенно при работе с пакетом деталей переменного размера, подсобранного на спутнике.
Поставленная цель достигается тем, что схват, содержащий установленный в корпусе цилиндр и з&жимные рычаги, дополнительно снабжен узлами фиксации и торможения цилиндра, при этом узел фиксации выполнен в виде расположенной в проточке корпуса схвата пневмокамеры, в которой размещены мембрана и толкатель, взаимодействующий с корпусом цилиндра, а узел торможения - в виде расположенного в замкнутой полости поршня с поперечной расточкой, в которой размещена пружина, на каждом последнем витке которой смонтирован диск, взаимодействующий со стенками корпуса, причем поршень узла торможения имеет возможность взаимодействия с регулируемыми упорами.
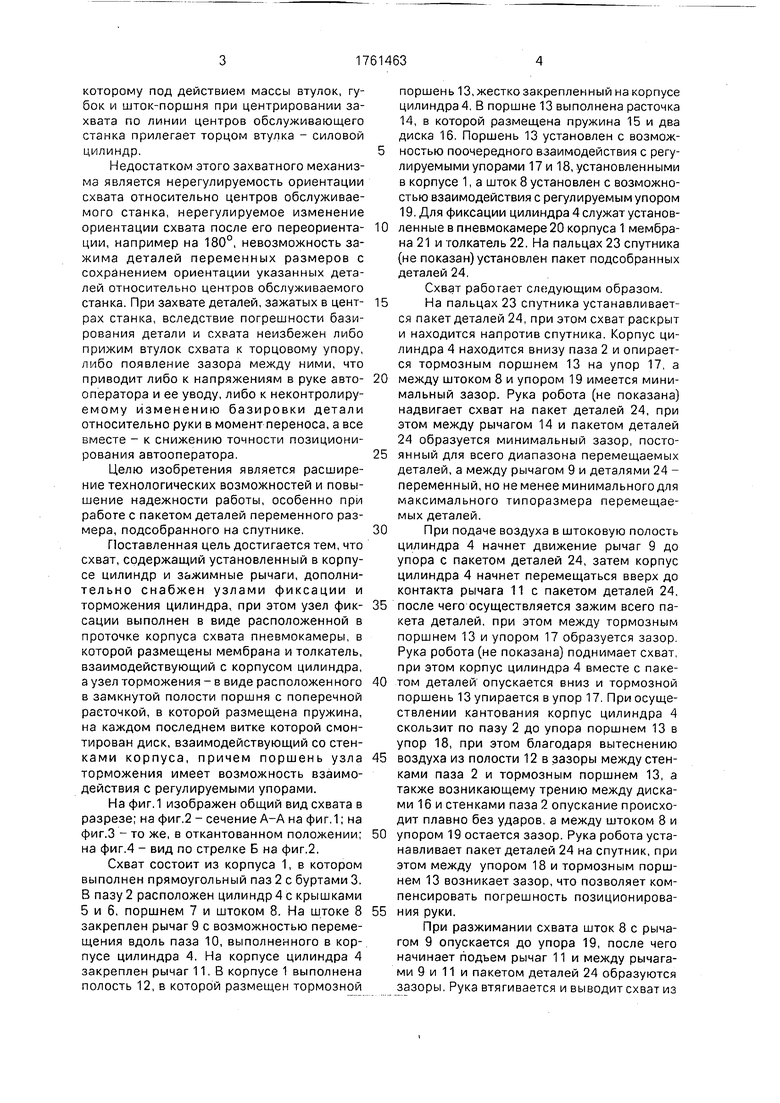
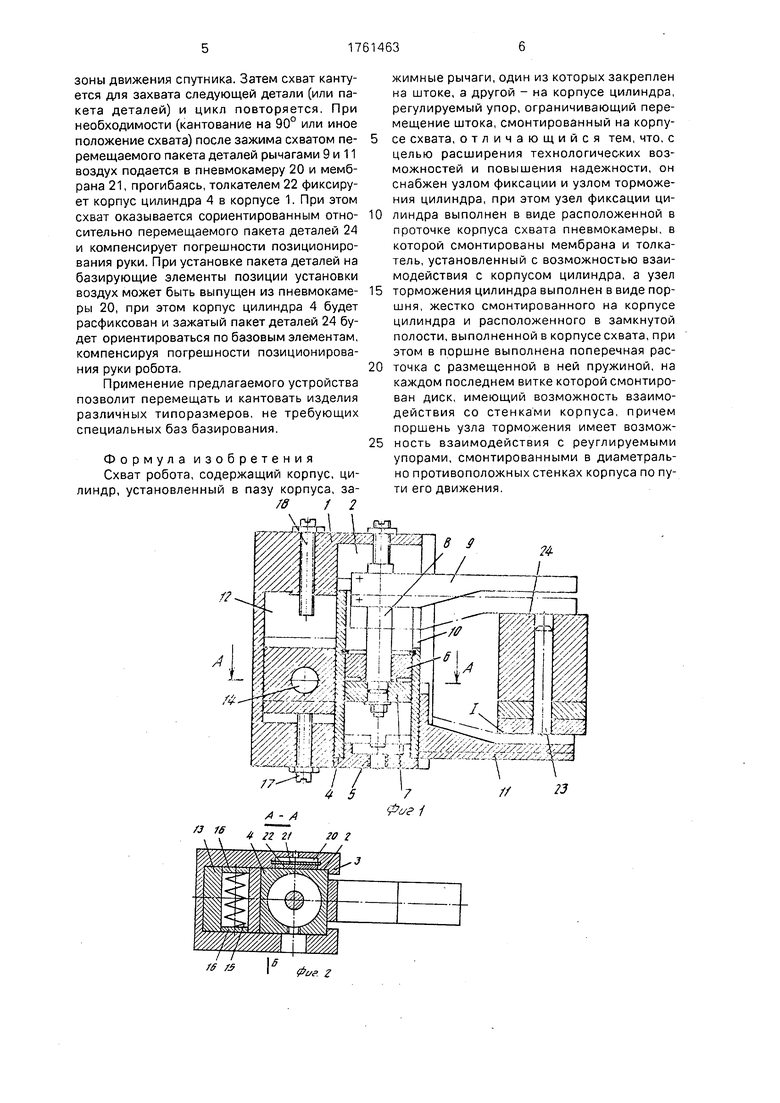
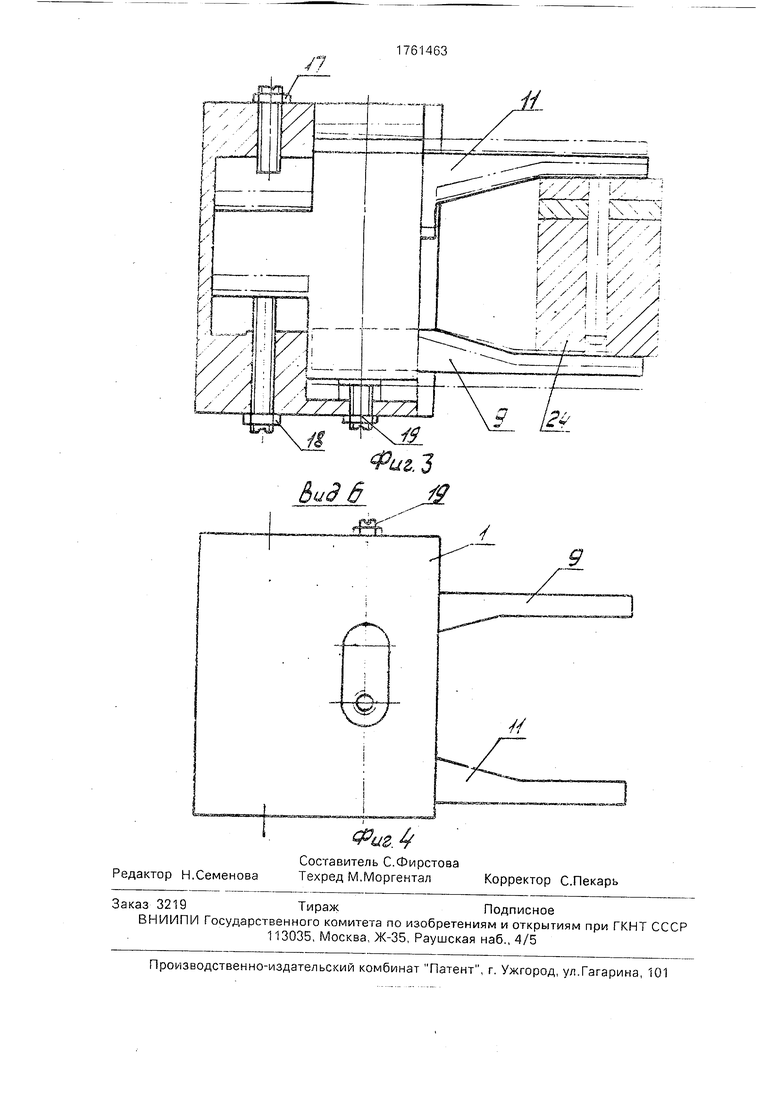
На фиг. 1 изображен общий вид схвата в разрезе; на фиг.2 - сечение А-А на фиг. 1; на фиг.З - то же, в откантованном положении; на фиг.4 - вид по стрелке Б на фиг.2.
Схват состоит из корпуса 1, в котором выполнен прямоугольный паз 2 с буртами 3. В пазу 2 расположен цилиндр 4 с крышками 5 и 6, поршнем 7 и штоком 8. На штоке 8 закреплен рычаг 9 с возможностью перемещения вдоль паза 10, выполненного в корпусе цилиндра 4. На корпусе цилиндра 4 закреплен рычаг 11. В корпусе 1 выполнена полость 12, в которой размещен тормозной
поршень 13,жесткозакрепленный на корпусе цилиндра 4. В поршне 13 выполнена расточка 14, в которой размещена пружина 15 и два диска 16. Поршень 13 установлен с возможностью поочередного взаимодействия с регулируемыми упорами 17 и 18, установленными в корпусе 1, а шток 8 установлен с возможностью взаимодействия с регулируемым упором 19. Для фиксации цилиндра 4 служат установ0 ленные в пневмокамере 20 корпуса 1 мембрана 21 и толкатель 22. На пальцах 23 спутника (не показан) установлен пакет подсобранных деталей 24.
Схват работает следующим образом.
5На пальцах 23 спутника устанавливается пакет деталей 24, при этом схват раскрыт и находится напротив спутника. Корпус цилиндра 4 находится внизу паза 2 и опирается тормозным поршнем 13 на упор 17, а
0 между штоком 8 и упором 19 имеется минимальный зазор. Рука робота (не показана) надвигает схват на пакет деталей 24, при этом между рычагом 14 и пакетом деталей 24 образуется минимальный зазор, посто5 янный для всего диапазона перемещаемых деталей, а между рычагом 9 и деталями 24 - переменный, но не менее минимального для максимального типоразмера перемещаемых деталей.
0При подаче воздуха в штоковую полость
цилиндра 4 начнет движение рычаг 9 до упора с пакетом деталей 24, затем корпус цилиндра 4 начнет перемещаться вверх до контакта рычага 11 с пакетом деталей 24,
5 после чего осуществляется зажим всего пакета деталей, при этом между тормозным поршнем 13 и упором 17 образуется зазор Рука робота (не показана) поднимает схват, при этом корпус цилиндра 4 вместе с паке0 том деталей опускается вниз и тормозной поршень 13 упирается в упор 17. При осуществлении кантования корпус цилиндра 4 скользит по пазу 2 до упора поршнем 13 в упор 18, при этом благодаря вытеснению
5 воздуха из полости 12 в зазоры между стенками паза 2 и тормозным поршнем 13, а также возникающему трению между дисками 16 и стенками паза 2 опускание происходит плавно без ударов, а между штоком 8 и
0 упором 19 остается зазор. Рука робота устанавливает пакет деталей 24 на спутник, при этом между упором 18 и тормозным поршнем 13 возникает зазор, что позволяет компенсировать погрешность позиционирова5 ния руки.
При разжимании схвата шток 8 с рычагом 9 опускается до упора 19, после чего начинает подъем рычаг 11 и между рычагами 9 и 11 и пакетом деталей 24 образуются зазоры. Рука втягивается и выводит схват из
зоны движения спутника. Затем схват кантуется для захвата следующей детали (или пакета деталей) и цикл повторяется При необходимости (кантование на 90° или иное положение схвата) после зажима схватом перемещаемого пакета деталей рычагами 9 и 11 воздух подается в пневмокамеру 20 и мембрана 21, прогибаясь, толкателем 22 фиксирует корпус цилиндра 4 в корпусе 1 При этом схват оказывается сориентированным относительно перемещаемого пакета деталей 24 и компенсирует погрешности позиционирования руки. При установке пакета деталей на базирующие элементы позиции установки воздух может быть выпущен из пневмокаме- ры 20, при этом корпус цилиндра 4 будет расфиксован и зажатый пакет деталей 24 будет ориентироваться по базовым элементам компенсируя погрешности позиционирования руки робота
Применение предлагаемого устройства позволит перемещать и кантовать изделия различных типоразмеров не требующих специальных баз базирования
Формула изобретения Схват робота, содержащий корпус, цилиндр, установленный в пазу корпуса, за0
5
0
5
жимные рычаги, один из которых закреплен на штоке, а другой - на корпусе цилиндра регулируемый упор, ограничивающий перемещение штока смонтированный на корпусе схвата, отличающийся тем что с целью расширения технологических возможностей и повышения надежности, он снабжен узлом фиксации и узлом торможения цилиндра, при этом узел фиксации цилиндра выполнен в виде расположенной в проточке корпуса схвата пневмокамеры в которой смонтированы мембрана и толкатель установленный с возможностью взаимодействия с корпусом цилиндра а узел торможения цилиндра выполнен в виде поршня жестко смонтированного на корпусе цилиндра и расположенного в замкнутой полости, выполненной в корпусе схвата, при этом в поршне выполнена поперечная расточка с размещенной в ней пружиной на каждом последнем витке которой смонтирован диск имеющий возможность взаимодействия со стенками корпуса причем поршень узла торможения имеет возможность взаимодействия с реуглируемыми упорами, смонтированными в диаметрально противоположных стенках корпуса по пути его движения
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Устройство для перегрузки конусов электронно-лучевых трубок с транспортера печи отжига | 1990 |
|
SU1839168A1 |
| Захватное устройство | 1991 |
|
SU1816688A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Устройство для шаговой подачи стопы заготовок | 1984 |
|
SU1194544A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Захватное устройство | 1984 |
|
SU1288046A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
Использование: в робототехнике, в захватных устройствах манипуляторов. Сущность изобретения: схват содержит корпус 1, цилиндр 4, установленный в пазу 2 корпуса, зажимные рычаги, один из которых 9 закреплен на штоке 8, а другой на корпусе цилиндра 4. При кантовании схвата на 180°, для обеспечения плавного перемещения пневмоцилиндра 4 с зажимными рычагами несущими пакет деталей, относительно корпуса схвата, в корпусе 1 выполнена полость 12, в которой установлен узел торможения цилиндра. Он выполнен в виде поршня, жестко смонтированного на корпусе цилиндра. В поршне выполнена поперечная расточка 14, в которой установлена пружина и два диска. За счет трения между дисками и стенками паза 2 обеспечивается плавность хода. При кантовании схвата на 90° для ориентации пневмоцилинидра, в корпусе установлен узел фиксации. Он выполнен в виде пневмокамеры, в которой смонтированы мембрана и толкатель. При подаче воздуха в пневмокамеру, мембрана прогибается и толкателем фиксирует корпус цилиндра. 4 ил. со с
4 ,
-
го г
/ /
Фие Z
2413
-- .,.-я--i -
wy
Составитель С Фирстова
Техред М МоргенталКорректор С.Пекарь
Редактор Н.Семенова
Заказ 3219ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035 Москва Ж-35 Раушская наб , 4/5
/
//
cfiae
| Автооператор | 1986 |
|
SU1379055A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
