Изобретение относится к автоматическому регулированию и предназначено для улучшения динамических характеристик систем автоматического регулирования.
Известно нелинейное корректирующее устройство, состоящее из запоминающего элемента, линейного безынерционного блока, элемента сравнения, релейного элемента, блока умножения, блока определения модуля, фильтра и нуль-органа [1].
Недостаток данного устройства заключается в зависимости вносимого в систему фазового определения от частоты входного сигнала.
Известно также нелинейное корректирующее устройство, состоящее из усилителя, блока определения модуля, блока умножения, пикового детектора, масштабирующего блока, сумматора, сигнум-реле и нуль-органа [2].
Недостатком данного устройства является высокая нелинейность эквивалентной фазовой характеристики, ограничивающая область применения корректирующего устройства.
Наиболее близким по технической сущности к предлагаемому является нелинейное корректирующее устройство, содержащее усилитель, блок определения модуля, первый и второй алгебраические сумматоры, масштабирующий блок, двуполярный пиковый детектор, формирователь, нуль-орган, управляемый ключ [3].
Входной гармонический сигнал усиливается до необходимости уровня усилителем и подается на суммирующий вход второго сумматора. На вычитающий вход второго сумматора через управляемый ключ подается сигнал с выхода масштабирующего блока, который в m раз изменяет величину выходного сигнала двуполярного пикового детектора (0<m<1), представляющую собой амплитудное значение входного сигнала за текущий знакопостоянный интервал. Работой ключа управляет формирователь в соответствии с абсолютной величиной разности амплитудного и текущего значений входного сигнала устройства. Выходом устройства является выход второго сумматора. Характеристики устройства определяются величиной коэффициента передачи масштабирующего блока.
Недостатком устройства является низкая точность работы в случае, когда величина коэффициента передачи масштабирующего блока отличается от номинальной.
Цель изобретения - повышение точности корректирующего устройства.
Это достигается введением в устройство, содержащее сумматор, суммирующий вход которого соединен с входом устройства через усилитель, а вычитающий - через последовательно соединенные двуполярный пиковый детектор, первый сумматор, блок определения модуля, формирователь и управляемый ключ, причем второй вход двуполярного пикового детектора непосредственно соединен с вычитающим входом первого сумматора, входом устройства и входом нуль-органа, выход которого соединен с вторым входом двуполярного пикового детектора, выход которого соединен с суммирующим входом первого сумматора и входом масштабирующего блока, подключенного выходом к второму входу управляемого ключа, последовательно соединенных однополярного пикового детектора, сумматора, формирователя импульсов и элемента ИЛИ, причем вычитающий вход дополнительного сумматора соединен с выходом блока определения модуля и первым входом однополярного пикового детектора, второй вход которого соединен с вторым входом двуполярного пикового детектора и выходом элемента ИЛИ, первый вход которого соединен с выходом нуль-органа, а второй - с выходом дополнительного формирователя.
Новая цепь элементов формирует на выходе элемента ИЛИ импульс сбора пиковых детекторов в случае, когда разность между текущим и максимальным значением модуля разности входного сигнала и его пиковым значением (выход блока определения модуля) отлична от нуля (сигнал на выходе третьего сумматора), либо при прохождении сигнала на входе устройства через ноль (выход нуль-органа).
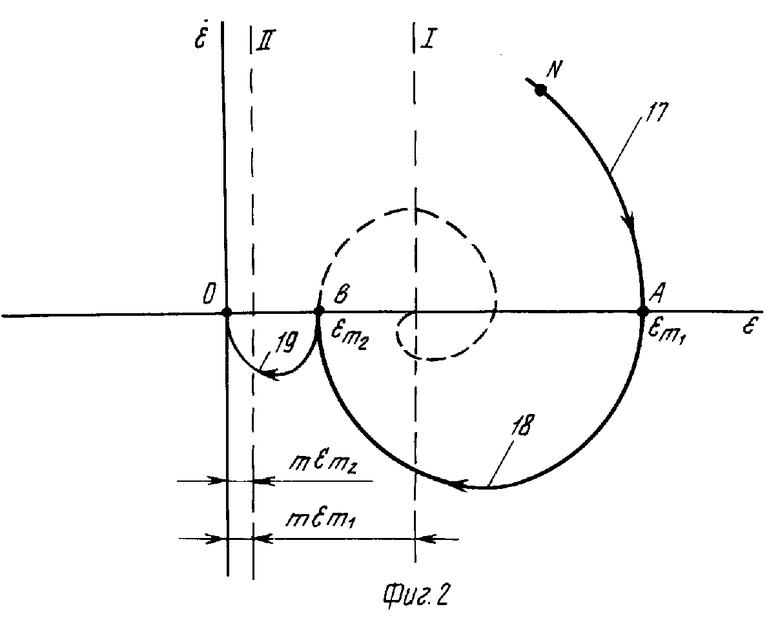
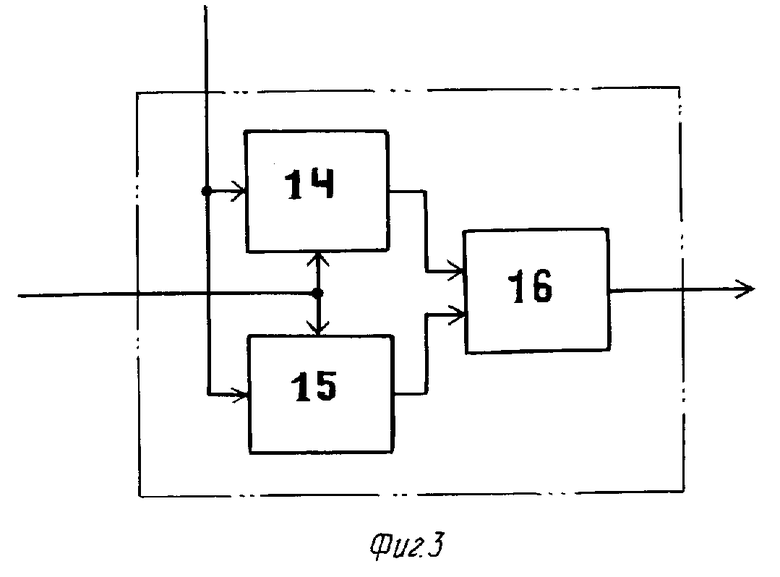
На фиг. 1 изображена блок-схема предлагаемого корректирующего устройства; на фиг. 2 - диаграмма, поясняющая работу устройства; на фиг. 3 - блок-схема двуполярного пикового детектора.
Нелинейное корректирующее устройство имеет в своем составе усилитель 1, блок 2 определения модуля, первый и второй алгебраические сумматоры 3 и 4, масштабирующий блок 5, двуполярный пиковый детектор 6, первый формирователь 7, нуль-орган 8, управляемый ключ 9, однополярный пиковый детектор 10, третий сумматор 11, второй формирователь 12 и элемент ИЛИ 13. Выход первого сумматора 3 является выходом устройства, его суммирующий вход соединен с входом устройства через усилитель 1, а вычитающий - через последовательно соединенные двуполярный пиковый детектор 6, сумматор 4, блок 2 определения модуля, первый формирователь 7 и управляемый ключ 9. Вычитающий вход сумматора 4 соединен с входом нуль-органа 8 и входом устройства непосредственно. Второй вход управляемого ключа 9 через масштабирующий блок 5 соединен с выходом двуполярного пикового детектора 6, установочный вход которого соединен с установочным входом однополярного пикового детектора 10 и выходом элемента ИЛИ 13, первый вход которого соединен с выходом нуль-органа 8, а второй - с выходом формирователя 12, управляемого сумматором 11. Входы сумматора 11 соединены с выходом блока 2 определения модуля, суммирующий через пиковый детектор 10, а вычитающий непосредственно.
Двуполярный пиковый детектор 6 реализуется на основе пиковых детекторов положительных значений 14, отрицательных значений 15 имеющих общую цепь сброса, и сумматора 16, включенных по схеме фиг. 3. Входы пиковых детекторов положительного 14 и отрицательного 15 значений соединены и являются входом двуполярного пикового детектора 6, выход сумматора 16, к входам которого подключены выходы пиковых детекторов 14 и 15, является выходом двуполярного пикового детектора 6.
Выходным сигналом двуполярного пикового детектора 6 является максимальное значение входного сигнала за текущий знакопостоянный интервал. Преобразованный масштабирующий блоком 5 (0<m<1, если k - коэффициент передачи блока 1 равен единице) сигнал поступает на второй вход управляемого ключа 9, режим работы которого задает формирователь 7 в соответствии с выходом блока 2 определения модуля, который в свою очередь определяется разностью максимального и текущего значений входного сигнала устройства. При нарастании входного сигнала устройства его максимальное и текущее значения совпадают, на выходе сумматора 4 поддерживается ноль, управляемый ключ 9 разомкнут. После того, как входной сигнал устройства достигнет максимального значения и начнет спадать, разность на выходе сумматора 4 увеличивается, что влечет за собой замыкание ключа 9, и выходная величина устройства уменьшается на εm˙ m. Абсолютное значение разности между текущей и амплитудной величиной входного сигнала устройства сравнивается посредством сумматора 11 с максимальным значением той же разности - выход пикового детектора 10 так, что при монотонном входном сигнале устройства на выходе формирователя 12 поддерживается ноль. Процесс продолжается до смены направления изменения входной величины устройства - абсолютное значение разности на выходе блока 2 определения модуля уменьшается, это обеспечивает ненулевой сигнал на выходе сумматора 11 и влечет сброс пиковых детекторов 6 и 10 от формирователя 12 через элемент ИЛИ 13. При прохождении входного сигнала устройства через ноль также происходит сброс пиковых детекторов от элемента ИЛИ 13, но уже вследствие сигнала от нуль-органа 8, это позволяет обеспечить работоспособность устройства при любых изменениях входного сигнала. Далее процессы повторяются.
Рассмотрим работу корректирующего устройства на фазовой плоскости (фиг. 2) на примере системы второго порядка с передаточной функцией
W(p) =  .
.
Пусть для исходной системы справедливо соотношение 4KT>1, в этом случае фазовая траектория имеет вид скручивающейся спирали. Начальные условия заданы на плоскости точкой N. Если величина коэффициента передачи масштабирующего блока 5 m меньше номинальной, движение происходит по кривой 17 (фиг. 2), сигнал на выходе сумматора 4 равен нулю, в точке A при смене знака скорости текущее и максимальное значения входного сигнала (выход сумматора 4) различны, и по сигналу формирователя 7 замыкается управляемый ключ 9 - вертикальная ось на фазовом портрете системы скачком смещается на величину m εm1 в положение I, движение происходит по кривой 18. До попадания траектории в точку B значение разности между текущим и максимальным значениями входного сигнала (сумматор 4) увеличивается и на выходе сумматора 10 поддерживается ноль. При попадании в точку B абсолютные максимальное и текущее значения разности становятся различны и по сигналу формирователя 8 происходит сброс пиковых детекторов 6 и 11. Пиковый детектор 6 сохраняет новое амплитудное значение входного сигнала, и вертикальная ось скачком перемещается в положение II, а движение продолжается по траектории 19. Это позволяет устранить постоянную составляющую ошибки в системе.
Таким образом, введение дополнительной управляющей цепи позволяет существенно увеличить точность при обеспечении в исходной системе апериодического переходного процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1989 |
|
SU1695260A1 |
| Нелинейное корректирующее устройство | 1988 |
|
SU1576881A2 |
| Нелинейное корректирующееуСТРОйСТВО | 1979 |
|
SU840790A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1120276A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| Корректирующее устройство | 1985 |
|
SU1278805A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
Изобретение относится к автоматическому регулированию и предназначено для улучшения динамических характеристик систем автоматического регулирования. Целью является повышение точности нелинейного корректирующего устройства. Устройство содержит усилитель 1, блок 2 определения модуля , два алгебраических сумматора 3,4, масштабирующий блок 5, двуполярный 6 и однополярный 10 пиковые детекторы, сумматор 11, два формирователя импульсов 7, 12, нуль-орган 8, управляемый ключ 9, элемент ИЛИ 13. 3 ил.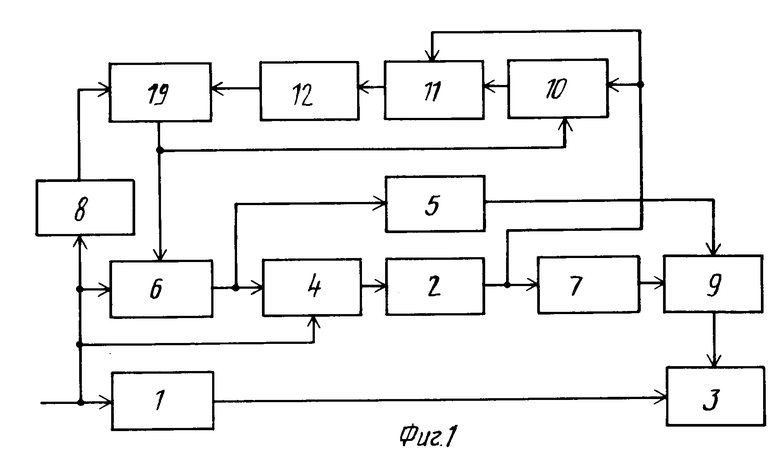
НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО, содержащее усилитель, вход которого является входом устройства и соединен с входом нулевого органа, вычитающим входом первого алгебраического сумматора и с информационным входом двуполярного пикового детектора, выход которого соединен с входом масштабирующего блока и суммирующим входом первого алгебраического сумматора, выход которого соединен с последовательно соединенными блоком определения модуля и первым формирователем, выход которого соединен с управляющим входом управляемого ключа, информационный вход которого соединен с выходом мастабирующего блока, выход - с вычитающим входом второго алгебраического сумматора, суммирующий вход которого соединен с выходом усилителя, а выход является выходом устройства, отличающееся тем, что, с целью повышения точности устройства, в него введены последовательно соединенные однополярный пиковый детектор, третий алгебраический сумматор, второй формирователь и элемент ИЛИ, второй вход которого соединен с выходом нуль-органа, выход - с сбросовыми входами пиковых детекторов, а выход блока определения модуля соединен с входом однополярного пикового детектора и вычитающим входом третьего алгебраического сумматора.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1695260A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
