- (t-T). Q 1
V - помеха измерения, представляющая собой белый шум, интенсивность кото рого равна R а2;
Z - вектор измерения (сигнал, снимаемый с датчика угла прецессии гироскопа).
Задача оптимального фильтра состоит в
.
.
определении наилучшей оценки дрейфа из мерителя Ј, на основании измерения Z(t).
В соответствии с положениями оптимальной фильтрации Калмана (ОФК) уравнение оптимального фильтра имеет вид
i(t)Fx(t)+K(t)z(t)-Hx(t),(3)
где K(t) - матрица коэффициентов усиления фильтра.
.
10 Р - F Р + PFT - PHTFT HI + GQGT (5)
Для решения уравнений (3) и (5) необходимо значение начальных условий, которые в данном случае имеют вид
15
Х(о).
,Р(о)
б О
О
(
Ј
Анализ уравнения (5) показывает, что в настоящем случае, т.к. система (1) является стационарной, данное дифференциальное уравнение выражается в алгебраическое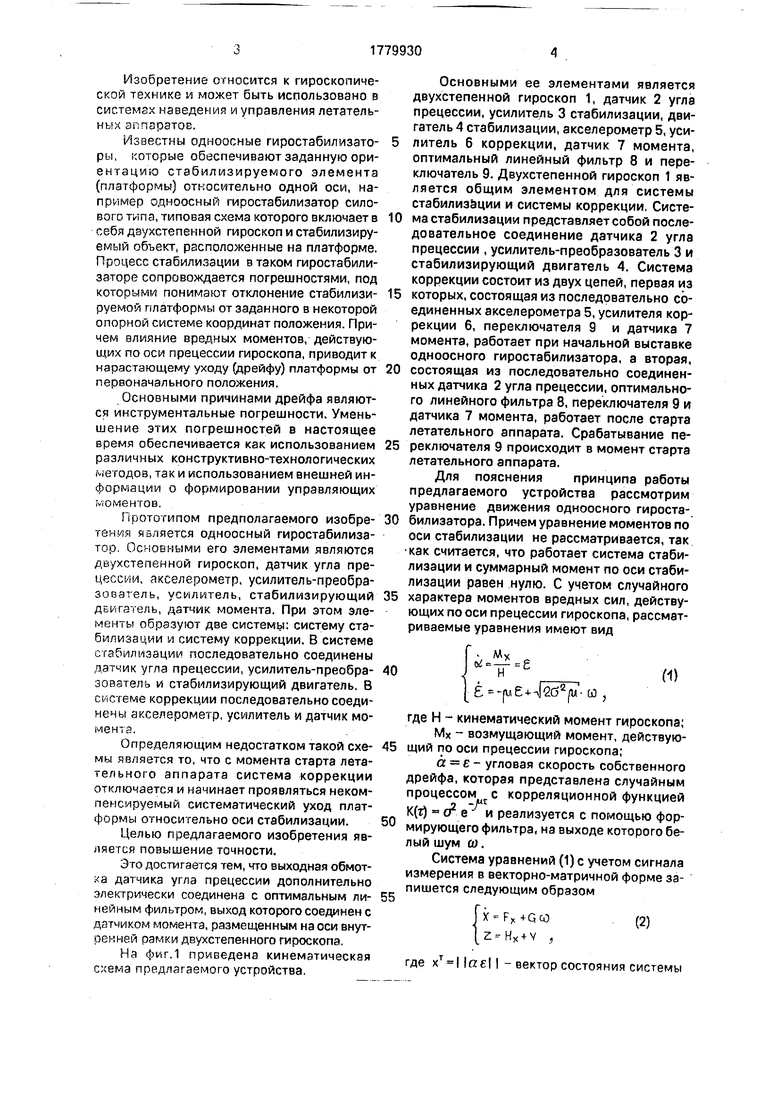


| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| ОДНООСНЫЙ ГИРОСТАБИЛИЗАТОР | 1991 |
|
RU2011171C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ОДНООСНОГО СИЛОВОГО СТАБИЛИЗАТОРА | 1989 |
|
RU2022362C1 |
| АНАЛИТИЧЕСКИЙ ГИРОКОМПАС | 1994 |
|
RU2087864C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| ГИРОАЗИМУТГОРИЗОНТКОМПАС | 2001 |
|
RU2202769C2 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО ПРИРАЩЕНИЯМ УГЛА ПРЕЦЕССИИ ГИРОБЛОКА | 2012 |
|
RU2509289C2 |
Изобретение относится к гироскопической технике и может бычь использовано в системах наведения и управления летательных аппаратов. Цель изобретения - повышение точности стабилизации. Одноосный гиростабилизс1тор содержит двустепенный гироскоп 1 с датчиком 2 угла прецессии и датчиком 7 момента, усилитель 3 стабилизации, двигатель 4 стабилизации, акселерометр 5, усилитель 6 коррекции, оптимальный линейный фильтр 8 и переключатель 9. Оптимальный линейный фильтр 8 включает в себя первый и второй сумматоры, интегратор, первый, второй и третий масштабирующие элементы. В гиро- стабилизаторе осуществляется разгрузка оси прецессии от действия вредных моментов за счет оптимального оценивания линейным фильтром ухода гиростзбилизатора и последующей его компенсации путем выработки управляющих сигналов на датчик момента. 2 ил.
V
Р,„ „-(UP.
14
Ри-|иРй, 2(цРи
Из последнего выражения с учетом симметричности матрицы Р можно записать
В2
2Р Н2а2 Р™ - IU Р,п
Р, йг
М2 цгаг
(6)
в
2Ppi2- P22+2tf .
Система уравнений (6) позволяет найти значения Р1г и Рц корреляционной матрицы Р, тогда коэффициенты матрицы усиления оптимального линейного фильтра будут равны
К
(7)
На основании результатов (7)уравнение оптимального фильтра (3) можно записать в виде системы двух дифференциальных уравнений первого порядка, связывающих компоненты вектора оценки x(t)
А А 5 Г/Ь k 1
(M-rЈj Ј - р«МтЧ(8)
&
О О
Иааа
Р22Р21 -
О 26 (U
Таким образом на вход оптимального линейного фильтра поступает сигнал, про- порциональкый углу Д а с выхода - сигналы, пропорциональные оценкам а и Ј . Система уравнений (8) позволяет построить структурную схему оптимального фильтра, которая приведена на фиг.2 и состоит из первого 10 и второго 11 сумматоров, интегратора 12, первого 13. второго 14 и третьего 15 масштабирующих элементов,
отображающих соответственно постоянные коэффициенты, равные
,
-lUMV iuVaMBVV
В
HV
;, структурной схеме первый неинвертирующий вход первого сумматора 10 является входом фильтра, а выход первого сумматора 10 через первый масштабирующий элемент 13 соединен с неинвертирующим входом второго сумматора 11, выход которого соединен с интегратором 12, выход которого соединен через второй масштабирующий элемент 14 с инвертирующим
входом второго сумматора 11 и через третий масштабирующий элемент 15 с инвертирующим входом первого сумматора 10 и является выходом фильтра.
Сигнал, пропорциональный оценке е, поступает на управляющие обмотки датчика момента, последний прикладывает к оси прецессии гироскопа компенсирующий момент, который и ликвидирует собственный уход гиростабилизатора относительно оси стабилизации.
Положительный эффект от использования предлагаемого устройства заключается в уменьшении собственного дрейфа гиростабилизатора (практически с точностью до ошибок оценок) благодаря разгрузки оси прецессии гироскопа от действия вредных моментов за счет оптимального оценивания линейным фильтром ухода гиростабилизатора и последующей его компенсацией путем выработки управляющих сигналов на датчик момента.
Формула изобретения
Одноосный гиростабилизатор, содержащий двустеленный гироскоп с датчиком момента и датчиком угла прецессии, выход которого через усилитель стабилизации соединен с двигателем стабилизации, послеBxoh
довательно соединенные акселерометр и усилитель коррекции, отличающийся тем, что, с целью повышения точности, в него дополнительно введены переключатель и оптимальный лийейный фильтр, включающий первый и второй сумматоры, интегратор, первый, второй и третий масштабирующие элементы, при этом выход дат- чика угла прецессии дополнительно
соединен с неинвертирующим входом первого сумматора, выход первого сумматора соединен через первый масштабирующий элемент с неинвертирующим входом второго сумматора, выход которого соединен с
интегратором, выход интегратора соединен через второй масштабирующий элемент с инвертирующим входом второго сумматора, через третий масштабирующий элемент соединен с инвертирующим входом первого
сумматора и соединен с первым входом переключателя, выход усилителя коррекции соединен с вторым входом переключателя, а выход переключателя соединен с входом датчика момента.
flue. 2
| Каргу Л.И | |||
| Измерительные устройства летательных аппаратов, М | |||
| Машиностроение | |||
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| Система механической тяги | 1919 |
|
SU158A1 |
