Изобретение относится к гироскопической технике и может быть использовано в системах наведения и управления летательных аппаратов.
Известен одноосный гиростабилизатор (ОГС), который обеспечивает заданную ориентацию стабилизируемого элемента (платформы) относительно одной оси [1] .
Типовая схема такого гиростабилизатора включает в себя двухстепенный гироскоп и стабилизируемый объект, расположенные на платформе. С платформой (обычно с помощью редуктора) связана выходная ось стабилизирующего двигателя, предназначенного для приложения к платформе моментов, компенсирующих действие возмущающих моментов относительно оси стабилизации. На оси подвеса гироскопа, называемой осью прецессии, установлен датчик угла прецессии, сигналы с которого поступают на усилитель системы стабилизации. Усиленный и преобразованный сигнал поступает на управляющие обмотки стабилизирующего двигателя. Совокупность датчика угла прецессии, усилителя и стабилизирующего двигателя принято называть системой стабилизации. Такое построение гироскопического прибора позволяет осуществлять стабилизацию платформы и расположенного на ней объекта.
Однако процесс стабилизации сопровождается погрешностями, под которыми понимают отклонение платформы от заданного в некоторой опорной системе координат положения. Причем влияние вредных моментов, действующих по оси прецессии гироскопа, приводит к нарастающему уходу (дрейфу) платформы от первоначального положения.
Известен одноосный гиростабилизатор, основными элементами которого являются двухстепенной гироскоп, датчик угла прецессии, акселерометр, усилитель-преобразователь системы силовой стабилизации, стабилизирующий двигатель, датчик момента [2] . При этом элементы образуют две системы: систему стабилизации и систему коррекции. В системе стабилизации последовательно соединены датчик угла прецессии усилитель силовой стабилизации и стабилизирующий двигатель. В системе коррекции последовательно соединены акселерометр, усилитель-преобразователь и датчик момента.
Определяющим недостатком такой схемы является то, что с момента старта летательного аппарата система коррекции отключается и начинает проявляться некомпенсируемый систематический уход платформы относительно оси стабилизации.
Целью изобретения является повышение точности работы одноосного гиростабилизатора за счет формирования дополнительного компенсирующего момента по оси прецессии.
Цель изобретения достигается тем, что в одноосный гиростабилизатор, содержащий двухстепенный гироскоп с датчиком угла прецессии и датчиком момента, последовательно соединенные усилитель стабилизации и стабилизирующий двигатель, а также последовательно соединенные акселерометр и усилитель-преобразователь, при этом выход датчика угла прецессии соединен со входом усилителя стабилизации, а выход усилителя-преобразователя соединен с датчиком момента, дополнительно введены дифференцирующее звено, нелинейный элемент выделения знака сигнала, усилитель положительного сигнала, усилитель отрицательного сигнала и сумматор, при этом выход датчика угла прецессии дополнительно соединен с входом дифференцирующего звена, выход которого соединен с входом нелинейного элемента выделения знака сигнала, выход нелинейного элемента выделения знака сигнала соединен с входом усилителя положительного сигнала и с входом усилителя отрицательного сигнала, выходы которых соединены с входами сумматора, а вход датчика момента дополнительно соединен с выходом сумматора.
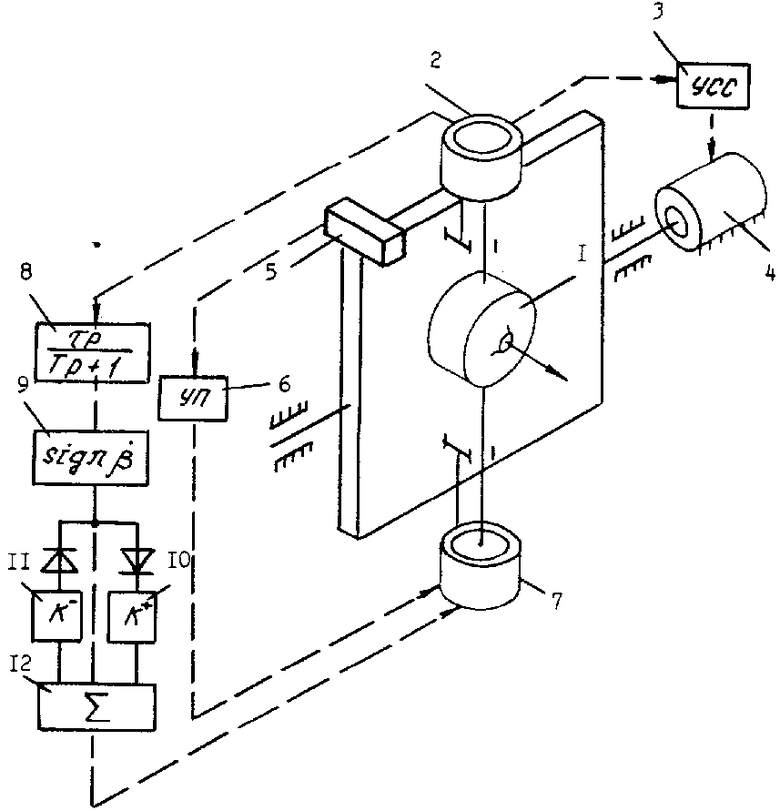
На чертеже показан гиростабилизатор.
Суть предложения иллюстрируется чертежом, на котором двухстепенный гироскоп 1 является общим элементом для системы стабилизации и системы коррекции. Система стабилизации представляет собой последовательное соединение датчика угла прецессии 2, усилителя стабилизации 3 и стабилизирующего двигателя 4. Система коррекции представляет собой последовательное соединение акселерометра 5, усилителя-преобразователя 6 и датчика момента 7. Параллельно системе коррекции в одноосный гиростабилизатор введена цепь компенсации. Основными ее элементами являются датчик угла прецессии 2, дифференцирующее звено 8, нелинейный элемент выделения знака сигнала 9, усилитель положительного сигнала 10, усилитель отрицательного сигнала 11, сумматор 12 и датчик момента 7. Причем выход датчика угла прецессии 2 дополнительно соединен с входом дифференцирующего звена 8, выход которого соединен с входом нелинейного элемента выделения знака сигнала 9, выход нелинейного элемента выделения знака сигнала 9 соединен с входом усилителя положительного сигнала 10 и с входом усилителя отрицательного сигнала 11, выходы которых соединены с входами сумматора 12, а вход датчика момента 7 дополнительно соединен с выходом сумматора 12. При действии возмущающего момента относительно оси стабилизации возникает прецессионное движение гироскопа относительно оси внутренней рамки и с датчика угла прецессии 2 снимается напряжение. Данное движение гироскопа является причиной возникновения момента сил сухого трения и следовательно дрейфа ОГС относительно оси стабилизации. С целью уменьшения данного дрейфа напряжение, снимаемое с датчика угла прецессии 2, поступает на вход дифференцирующего звена 8, на выходе которого формируется сигнал, пропорциональный скорости прецессии гироскопа. Далее сигнал поступает на нелинейный элемент выделения знака сигнала 9. Последний определяет знак скорости прецессии гироскопа и формирует на основании данной информации сигнал либо на усилитель положительного сигнала 10, если угловая скорость положительна, либо на усилитель отрицательного сигнала 11, если угловая скорость прецессии отрицательна. После усиления сигнал поступает на управляющую обмотку датчика момента 7. Датчик момента 7 прикладывают к оси прецессии ОГС момент, который компенсирует возмущающий момент, действующий по этой же оси гироскопа, что в конечном итоге и уменьшает собственный уход (дрейф) гиростабилизатора.
Для пояснения принципа работы предлагаемого устройства рассмотрим уравнения движения одноосного гиростабилизатора. Причем данные уравнения после старта летательного аппарата (ЛА) (цепь коррекции отключена) имеют вид
A + μx
+ μx + M
+ M = Mx;
= Mx;
B  +
+  - H
- H - Kстβ= Mη , (1) где β,
- Kстβ= Mη , (1) где β,  ,
,  ;
;  ,
,  - углы, угловые скорости и ускорения движения гироскопа относительно оси внутренней и наружной рамок;
- углы, угловые скорости и ускорения движения гироскопа относительно оси внутренней и наружной рамок;
А, В - моменты инерции гироскопа и других подвижных частей относительно осей х и η;
Н - кинетический момент гироскопа;
μх, μη- коэффициенты вязкого трения относительно осей х и η;
Кст - коэффициент передачи цепи стабилизации.
Анализ первого уравнения системы (1) показывает, что в результате действия возмущающих моментов по оси внутренней рамки гиростабилизатора наблюдается некомпенсируемый собственный уход (дрейф) прибора со скоростью =
=  (2)
(2)
Сумма вредных моментов ΣMвозх содержит следующие наиболее характерные слагаемые
ΣMвозх= Mтх+ Mдбх+ Mтпх+ Mпрх , (3) где Mтх - момент сил сухого трения по оси внутренней рамки;
Mдбх - моменты сил дебаланса;
Mтпх - моменты тяжения токоподводов;
Mпрх - прочие возмущающие моменты.
Моменты сил сухого трения - один из наиболее существенных факторов, вызывающих собственные уходы ОГС. Экспериментально установлено, что моменты сил сухого трения не зависят от времени, угловой скорости относительного перемещения, а меняют знак при изменении направления скорости относительного перемещения, причем в общем случае Мтх+ ≠Мтх-. Следует отметить, что значения Мтх+ и Мтх- являются постоянными для данного конкретного прибора и могут быть определены на этапе заводской настройки и выходного контроля.
Рассмотрим динамику работы одноосного гиростабилизатора после старта ЛА. При появлении случайного по своей природе возмущающего момента по оси стабилизации возникает прецессионное движение гироскопа относительно оси внутренней рамки и тем самым возникает момент сил сухого трения, который и вызывает основную составляющую дрейфа ОГС. Но после старта ЛА сигнал с датчика угла прецессии поступает на звено с передаточной функцией вида
W(p) =  , τ≫ T и тем самым на его выходе имеет сигнал, пропорциональный скорости прецессии гироскопа
, τ≫ T и тем самым на его выходе имеет сигнал, пропорциональный скорости прецессии гироскопа  . Затем сигнал поступает на звено, которое реализует уравнение сигнатуры угловой скорости и формирует напряжение единичной амплитуды положительной полярности, если угловая скорость прецессии положительна и наоборот - напряжение единичной амплитуды отрицательной полярности, если
. Затем сигнал поступает на звено, которое реализует уравнение сигнатуры угловой скорости и формирует напряжение единичной амплитуды положительной полярности, если угловая скорость прецессии положительна и наоборот - напряжение единичной амплитуды отрицательной полярности, если  <0. Данное напряжение поступает на усилитель с коэффициентом усиления, равным
<0. Данное напряжение поступает на усилитель с коэффициентом усиления, равным
K , где Мтх+(-) - амплитудное значение момента трения при
, где Мтх+(-) - амплитудное значение момента трения при  >(<)0, которое определяется в заводских условиях;
>(<)0, которое определяется в заводских условиях;
Кдм - коэффициент передачи датчика момента ОГС.
Коэффициент усиления Кус+(-) рассчитывается и устанавливается на заводе в процессе настройки и испытания прибора. Далее сигнал через сумматор поступает на управляющие обмотки датчика момента и последний создает относительно оси внутренней рамки компенсационный момент, равный по величине и противоположный по направлению моменту сил сухого трения. Тем самым составляющая собственного ухода гиростабилизатора, обусловленная моментами сил сухого трения, будет в значительной части скомпенсирована.
Положительный эффект заключается в уменьшении собственного ухода (дрейфа) одноосного гиростабилизатора благодаря разгрузке оси прецессии гироскопа от действия вредных моментов за счет определения знака скорости прецессии гироскопа и формирования на основе этой информации момента компенсации. (56) 1. Назаров Б. И. Силовые гиростабилизаторы. Развитие механики гироскопических и инерциальных систем. М. : Наука, 1973, с. 183-216.
2. Каргу Л. И. Измерительные устройства летательных аппаратов. М. : Машиностроение, 1988, с. 256.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ОДНООСНОГО СИЛОВОГО СТАБИЛИЗАТОРА | 1989 |
|
RU2022362C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| Гироскопический стабилизатор с контуром управления усилием в опорах гироблока | 2022 |
|
RU2789307C1 |
| Одноосный гиростабилизатор | 1990 |
|
SU1779930A1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2016 |
|
RU2630526C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
Изобретение относится к гироскопической технике и может быть использовано в системах наведения и управления летательных аппаратов. Целью изобретения является повышение точности стабилизации платформы гиростабилизатора за счет формирования дополнительного компенсирующего момента по оси прецессии, который разгружает данную ось от вредных моментов. Для формирования дополнительного компенсирующего момента сигнальная обмотка датчика угла прецессии дополнительно электрически соединена с входом схемы, которая определяет знак скорости прецессии гироскопа и формирует на основе данной информации управляющие сигналы на датчик момента. 1 ил.
ОДНООСНЫЙ ГИРОСТАБИЛИЗАТОР, содержащий двухстепенный гидроскоп с датчиком угла прецессии и датчиком момента, последовательно соединенные усилитель стабилизации и стабилизирующий двигатель, а также последовательно соединенные акселерометр и усилитель-преобразователь, при этом выход датчика угла прецессии соединен с входом усилителя стабилизации, а выход усилителя-преобразователя соединен с датчиком момента, отличающийся тем, что в него дополнительно введены дифференцирующее звено, нелинейный элемент выделения знака сигнала, усилитель положительного сигнала, усилитель отрицательного сигнала и сумматор, при этом выход датчика угла прецессии дополнительно соединен с входом дифференцирующего звена, выход которого соединен с входом нелинейного элемента выделения знака сигнала, выход нелинейного элемента выделения знака сигнала соединен с входом усилителя положительного сигнала и с входом усилителя отрицательного сигнала, выходы которых соединены с входами сумматора, а вход датчика момента дополнительно соединен с выходом сумматора.
