Изобретение относится к машиностроению, а именно к захватные; устройствам промышленных манипуляторов.
Цель изобретения - повышение надежности работы путем закручивания пальцев в винтовую спираль при захвате детали.
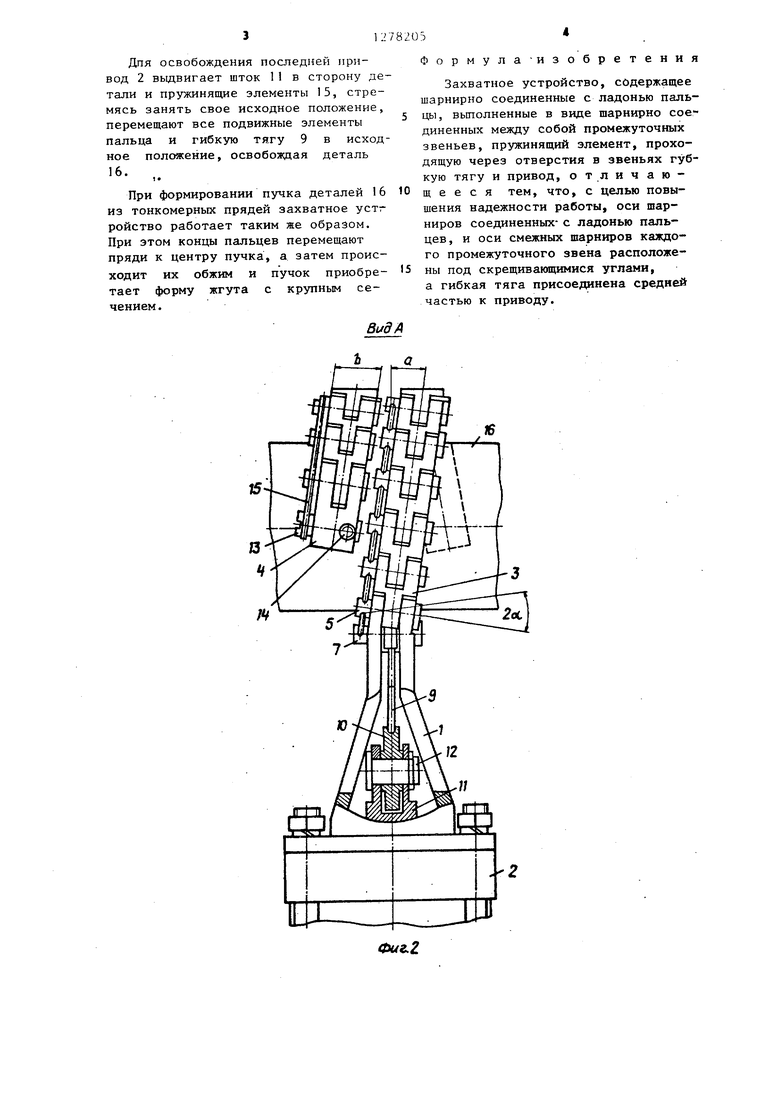
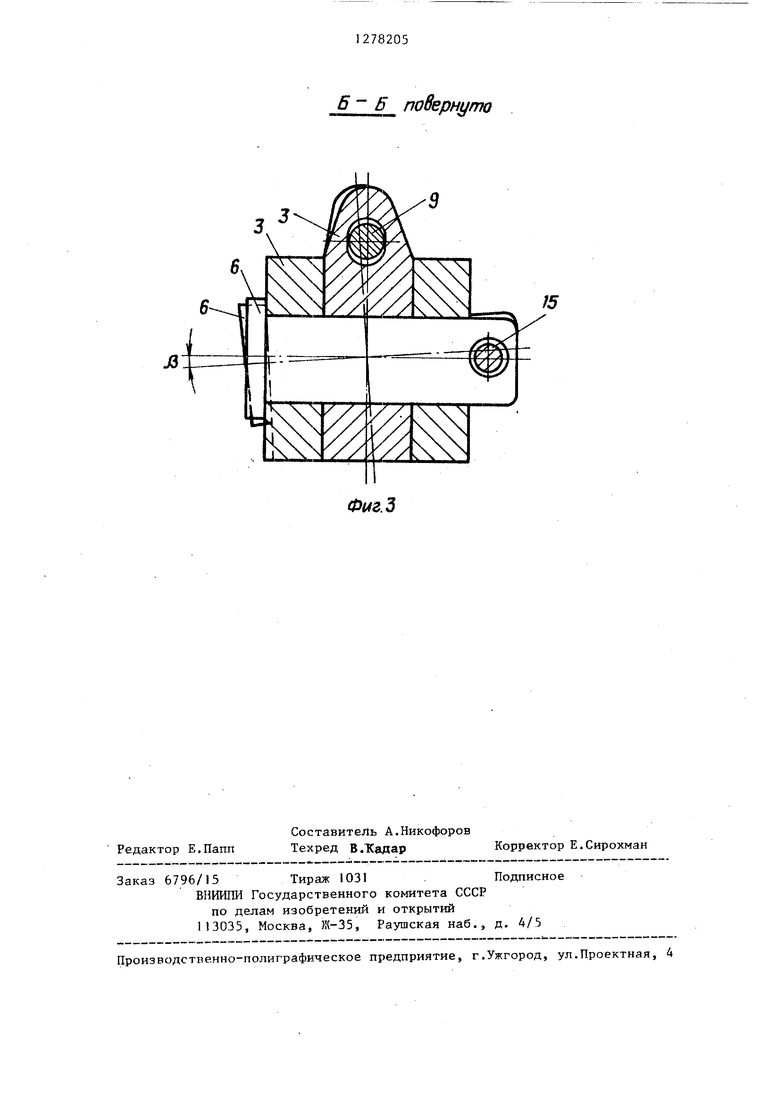
На фиг.1 изображено захватное усройство, общий вид; на фиг.2 - вид А на фиг.1 (левый палец устройства показан в конечном положении); на фиг.З - разрез Б-Б на фиг.1 (за плокостью разреза условно показано толко одно смежное звено).
Захватное устройство, используемое, например, в составе робототехнологического комплекса, осуществляющего формирование тонкомерных прядей в пучки с диаметром, изменяющимся по длине, их обжим, резку и укладку, состоит из ладони 1, к которой крепится привод 2 и шарнирно присоединяются пальцы, выполненные в виде последовательно соединенных про гежуточных звеньев 3 и конечного звена 4. Оси 5 соединения первых звеньев 3 с ладонью 1 скрещиваются под углом 2 оС. Угол ос равен углу налона винтовой линии, пересекающей оси 6, расположенные в промежуточных звеньях 3, При обхватывании минимального расчетного диаметра детали D,
АЛИН
Угол об определяется из условия неперекрытия правого и левого пальцев при обхватывании детали минимального расчетного диаметра D,,H. Оси 6 . Перекрещиваются под углом р , определяемым из условия неперекрытия пальцем самого себя. В ладони 1 на осях 7 установлены отклоняющие . блоки 8. Через отверстия в промежуточных звеньях 3 пропущена гибкая тяга 9, средняя часть которой огибает отклоняющие блоки 8 и блок 10, установленный на конце штока 11 посредством оси 12. Шток входит в со- став привода 2, Оба конца гибкой тяги 9 закрепляются в конечных промежуточных звеньях 4 воротом 13 с последующей фиксацией его винтом 14.
Через отверстия в осях 5-7 каждого пальца пропускается пружинящий элемент 15, зацеп которого фиксируется на конечном звене 4 воротом 13. Таким образом, расположение осей 5 и 7 на ладони 1 и конфигурация пружинящего элемента 15 после фиксации
обоих концов гибкой тяги 9 задают исходную конфигурацию пальцев.
Углы об и р рассчитываются по следующим зависимостям:
b + i
п-D
180
7J-, град;
мин S
10
rt Г. . t у. ft arccos 1 -sini t( I -cos) ,
град.
где b - щирина пальцев, мм;
Л - гарантированный зазор между витками пальцев для компенсации люфтов и неточности изготовления, мм; п - количество звеньев пальца, которые охватывают деталь на угол 360°;
0
5
0
5
5
0
5
D,
мин
минимальный диаметр охватываемой детали, мм.
Захватное устройство работает следующим образом.
Шток 11 привода 2 перемещает блоком 10 среднюю часть гибкой тяги 9 в направлении от центра зажимаемой детали 16 к приводу 2. Закрепленные концы гибкой тяги 9 перемещают конечные звенья 4 по пространственной траектории, заданной расположением.осей 5-7 при этом деформируется пружинящий элемент 15, который задает расположение проме 1гуточных звеньев 3 в пространстве до тех пор, пока какое- либо из звеньев не упрется в зажимаемую деталь 16. После упора этого звена в деталь 16 перемещение его ограничивается поверхностью самой детали 16, а остальные звенья 3, расположенные в сторону конца пальца, продолжают свое перемещение до упора в деталь 16 или до останова штока I1. Остановка одного из пальцев не ограничивает перемещение звеньев 3 другого пальца и они перемещаются до тех пор, пока не выбирается свободный ход пальца.
После полного обжима детали 16 шток 11 вынужден остановиться, не выбрав свой полный ход. При отсутствии детали 16 в зоне захвата пальцев они приобретают конфигурацию витков винтовой спирали с постоянным шагом, причем упорные выступы промежуточных звеньев 3, выполненные в виде сферы, располагаются на цилиндрической поверхности, определяемой минимальным расчетным диаметром . зажимаемой детали 16.
Дпя освобождения последней привод 2 выдвигает шток 11 в сторону детали и пружинящие элементы 15, стремясь занять свое исходное положение, перемещают все подвижные элементы пальца и гибкую тягу 9 в исходное положение, освобождая деталь
16.
t
При формировании пучка деталей 16 из тонкомерных прядей захватное устг ройство работает таким же образом. При этом концы пальцев перемещают пряди к центру пучка, а затем происходит их обжим и пучок приобре- тает форму жгута с крупным сечением .
Формула-изобретения
Захватное устройство, содержащее шарнирно соединенные с ладонью пальцы, вьшолненные в виде шарнирно соединенных между собой промежуточных звеньев, пружинящий элемент, проходящую через отверстия в звеньях губ- кую тягу и привод, отличающееся тем, что, с целью повышения надежности работы, оси шарниров соединенных- с ладонью пальцев, и оси смежных шарниров каждого промежуточного звена расположены под скрещивающимися углами, а гибкая тяга присоединена средней частью к приводу.
US
Фиг. 2
Б Б повернуто
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1985 |
|
SU1298074A1 |
| Захват манипулятора | 1985 |
|
SU1288057A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2022782C1 |
| Устройство для механической обработки пластмассовых деталей | 1987 |
|
SU1479298A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| ЗАХВАТ | 2014 |
|
RU2570597C1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| ТЕАТРАЛЬНАЯ КУКЛА И КИСТЬ КУКЛЫ | 2006 |
|
RU2349360C2 |
| ИСКУССТВЕННЫЙ ПАЛЕЦ | 2014 |
|
RU2667624C2 |
| Захват | 1986 |
|
SU1397280A1 |
Изобретение относится к области машиностроения, а именно к захватным устройствам промьшшенных манипуляторов. Изобретение позволяет повысить надежность в работе путем закручивания пальцев в винтовую де- тгшь при захвате детали. Захватное устройство содержит ладонь 1, к кото- рой крепится привод 2 и шарнирно соединенные пальцы, выполненные в виде последовательно соединенных промежуточных звеньев 3. Оси 5 соединения первых звеньев 3 с ладонью 1 скрещиваются под углом 2ot. . Оси 6 звеньев 3 скрещиваются под углом р. В ладони 1 на осях 7 установлены отклоняющие блоки 8. Через отверстия в промежуточных звеньях 3 пропущена гибкая тяга 9, средняя часть которой огибает отклоняющие блоки 8 и блок 10, установленный ва конце штока И посредством оси 12. Оба конца гибкой тяги 9 закрепляются в конечных промежуточных звеньях 4 посредством ворота 13 с фиксацией его винтом 14. Пальцы захватьшают деталь 16. 3 ил. (Л
Редактор Е.Папп
Составитель А.Никофоров Техред В.ТСадар
Заказ 6796/15 Тираж 1031 . Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий П3035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Ф14г.З
Корректор Е.Сирохман
| Захват манипулятора | 1978 |
|
SU724337A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
