Изобретение относится к сельскому хозяйству, в частности к способам автоматического управления тракторным агрегатом или самоходной сельскохозяйственной машиной.
Цель изобретения - повышение эффективности и безопасности вождения путем оптимизации скорости движения агроробота.
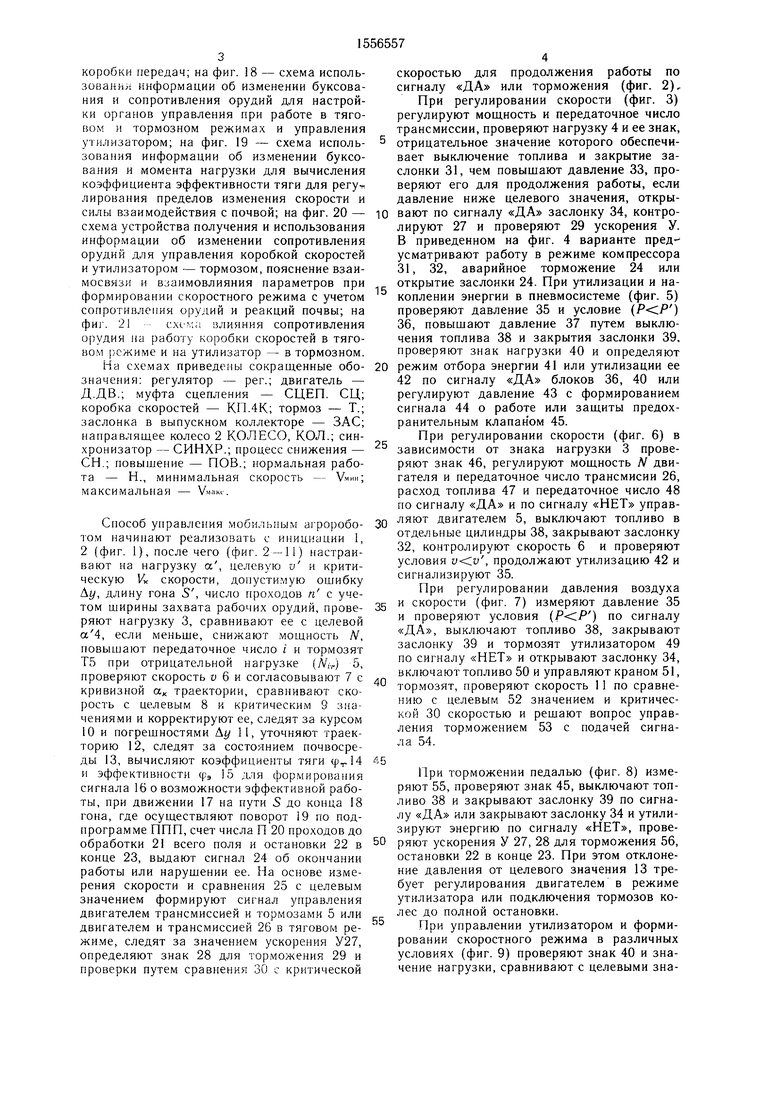
На фиг 1 изображена блок-схема способа управления агррроботом; на фиг. 2 - то же, при регулировании скорости; на фиг. 3 - то же, при регулировании давления воздуха в пневмоприводе при утилизации энергии; на фиг. 4 - то же, в тормозном режиме; на фиг. 5 - то же, при регулировании давления воздуха; на фиг. 6 - то же, при определении режима и знака нагрузки; на фиг. 7 - то же, при выборе режима по давлению воздуха; на фиг. 8 - то же, при нажатии на педаль торможения; на фиг. 9 - то же, при формировании скорости в различных условиях; на фиг. 10 - то же, при регулировании скорости и поворачивающих моментов в зависимости от радиуса поворота; на фиг. 11- процесс согласования параметров режима работы и траектории движения при регулировании скоростей; на фиг. 12 - схема взаимосвязи органов управления; на фиг. 13 - то же, при торможении; на фиг. 14 - то же, при повороте агроробота; на фиг. 15 - то же, при работе синхронизатора коробки скоростей; на фиг. 16 - схема устройства согласования управления двигателем, муфтой сцепления и синхронизатором коробки скоростей; на фиг. 17 - схема согласования работы регулятора, муфты сцепления и синхронизатора
СП
сп
05 СП
ел 4
коробки передач; на фиг. 18 - схема исполь- зованил информации об изменении буксования и сопротивления орудий для настройки органов управления при работе в тяговом и тормозном режимах и управления утилизатором; на фиг. 19 - схема использования информации об изменении буксования и момента нагрузки для вычисления коэффициента эффективности тяги для регулирования пределов изменения скорости и
скоростью для продолжения работы по сигналу «ДА или торможения (фиг. 2), При регулировании скорости (фиг. 3) регулируют мощность и передаточное число трансмиссии, проверяют нагрузку 4 и ее знак, 5 отрицательное значение которого обеспечивает выключение топлива и закрытие заслонки 31, чем повышают давление 33, проверяют его для продолжения работы, если давление ниже целевого значения, открысилы взаимодействия с почвой; на фиг. 20 - ю вают по сигналу «ДА заслонку 34, контро- схема устройства получения и использования лируют 27 и проверяют 29 ускорения У. информации об изменении сопротивления В приведенном на фиг. 4 варианте предусматривают работу в режиме компрессора 31, 32, аварийное торможение 24 или
орудий для управления коробкой скоростей и утилизатором - тормозом, пояснение взаимосвязи и взаимовлияния параметров при формировании скоростного режима с учетом сопротивления орудий и реакций почвы; на фиг. 21cxi : ; влияния сопротивления
орудия на работу коробки скоростей в тяговом режиме и на утилизатор - в тормозном.
открытие заслонки 24. При утилизации и накоплении энергии в пневмосистеме (фиг. 5)
проверяют давление 35 и условие (Р.Р ) 36, повышают давление 37 путем выключения топлива 38 и закрытия заслонки 39, проверяют знак нагрузки 40 и определяют
На схемах приведены сокращенные обо- 20 режим отбора энергии 41 или утилизации ее значения: регулятор - per.; двигатель - 42 по сигналу «ДА блоков 36, 40 или Д.ДВ.; муфта сцепления - СЦЕП. СЦ; регулируют давление 43 с формированием коробка скоростей - КП.4К; тормоз - Т.; сигнала 44 о работе или защиты предох- заслонка в выпускном коллекторе - ЗАС; направлящее колесо 2 КОЛЕСО, КОЛ.; синхронизатор - СИНХР.; процесс снижения - 25 СН.; повышение - ПОВ.; нормальная работа - Н., минимальная скорость - Учив;
максимальная - Ума
Способ управления мобильным агроробо- 30 том начинают реализовать с инициации 1, 2 (фиг. 1), после чего (фиг. 2 -11) настраивают на нагрузку а , целевую и и критическую 14 скорости, допустимую ошибку At/, длину гона S , число проходов п с учеранительным клапаном 45.
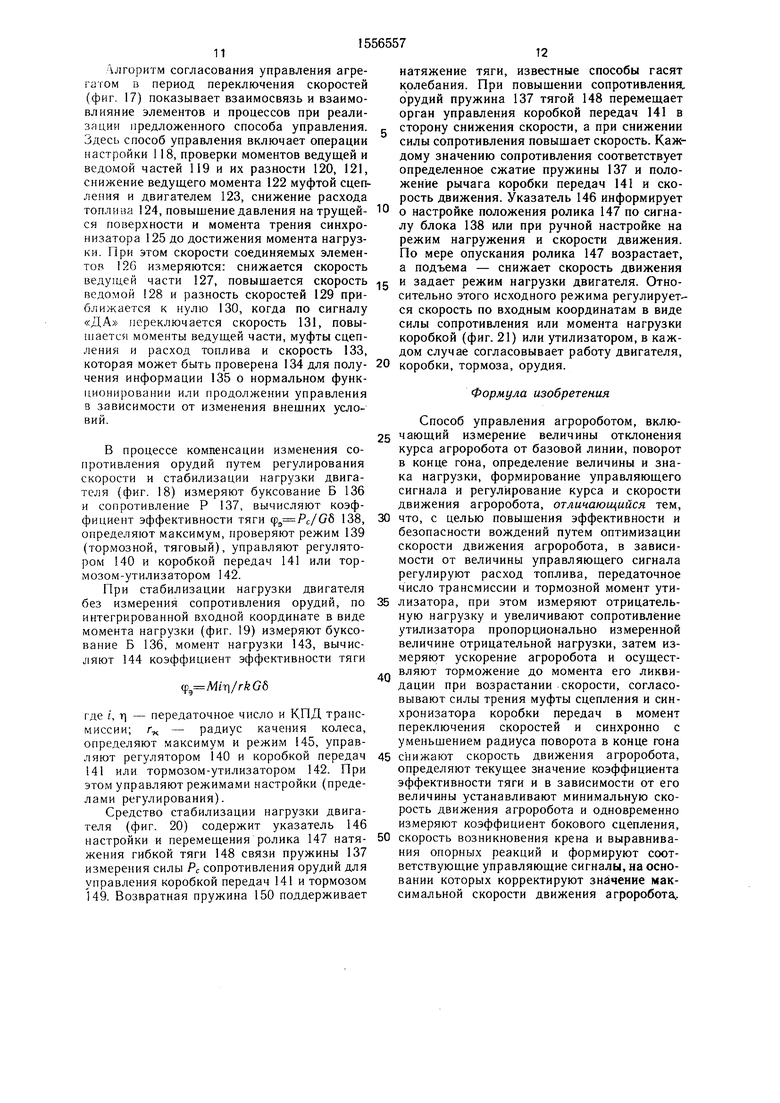
При регулировании скорости (фиг. 6) в зависимости от знака нагрузки 3 проверяют знак 46, регулируют мощность N двигателя и передаточное число трансмисии 26, расход топлива 47 и передаточное число 48 по сигналу «ДА и по сигналу «НЕТ управляют двигателем 5, выключают топливо в отдельные цилиндры 38, закрывают заслонку 32, контролируют скорость 6 и проверяют условия , продолжают утилизацию 42 и сигнализируют 35.
При регулировании давления воздуха
том ширины захвата рабочих орудий, прове- 35 и скорости (фиг. 7) измеряют давление 35
и проверяют условия ( ) по сигналу «ДА, выключают топливо 38, закрывают 39 и тормозят утилизатором 49
40
ряют нагрузку 3, сравнивают ее с целевой а 4, если меньше, снижают мощность N, повышают передаточное число i и тормозят Т5 при отрицательной нагрузке (М,-) 5, проверяют скорость оби согласовывают 7 с кривизной ак траектории, сравнивают скорость с целевым 8 к критическим 9 значениями и корректируют ее, следят за курсом 10 и погрешностями Ду 11, уточняют траекторию 12, следят за состоянием почвосре- ды 13, вычисляют коэффициенты тяги 45 и эффективности ф3 15 для формирования сигнала 16 о возможности эффективной работы, при движении 17 на пути S до конца 18 гона, где осуществляют поворот 19 по подпрограмме ППП, счет числа П 20 проходов до
заслонку ЗУ и тормозят утилизатором по сигналу «НЕТ и открывают заслонку 34, включают топливо 50 и управляют краном 51, тормозят, проверяют скорость 11 по сравнению с целевым 52 значением и критической 30 скоростью и решают вопрос управления торможением 53 с подачей сигнала 54.
При торможении педалью (фиг. 8) измеряют 55, проверяют знак 45, выключают топливо 38 и закрывают заслонку 39 по сигналу «ДА или закрывают заслонку 34 и утилизируют энергию по сигналу «НЕТ, провеобработки 21 всего поля и остановки 22 в 50 ряют ускорения У 27, 28 для торможения 56,
конце 23, выдают сигнал 24 об окончании работы или нарушении ее. На основе измерения скорости и сравнения 25 с целевым значением формируют сигнал управления двигателем трансмиссией и тормозами 5 или двигателем и трансмиссией 26 в тяговом режиме, следят за значением ускорения У27, определяют знак 28 для торможения 29 и проверки путем сравнения 30 с критической
55
остановки 22 в конце 23. При этом отклонение давления от целевого значения 13 требует регулирования двигателем в режиме утилизатора или подключения тормозов колес до полной остановки.
При управлении утилизатором и формировании скоростного режима в различных условиях (фиг. 9) проверяют знак 40 и значение нагрузки, сравнивают с целевыми знаскоростью для продолжения работы по сигналу «ДА или торможения (фиг. 2), При регулировании скорости (фиг. 3) регулируют мощность и передаточное число трансмиссии, проверяют нагрузку 4 и ее знак, отрицательное значение которого обеспечивает выключение топлива и закрытие заслонки 31, чем повышают давление 33, проверяют его для продолжения работы, если давление ниже целевого значения, открывают по сигналу «ДА заслонку 34, контро- лируют 27 и проверяют 29 ускорения У. В приведенном на фиг. 4 варианте предусматривают работу в режиме компрессора 31, 32, аварийное торможение 24 или
открытие заслонки 24. При утилизации и накоплении энергии в пневмосистеме (фиг. 5)
проверяют давление 35 и условие (Р.Р ) 36, повышают давление 37 путем выключения топлива 38 и закрытия заслонки 39, проверяют знак нагрузки 40 и определяют
режим отбора энергии 41 или утилизации ее 42 по сигналу «ДА блоков 36, 40 или регулируют давление 43 с формированием сигнала 44 о работе или защиты предох-
ранительным клапаном 45.
При регулировании скорости (фиг. 6) в зависимости от знака нагрузки 3 проверяют знак 46, регулируют мощность N двигателя и передаточное число трансмисии 26, расход топлива 47 и передаточное число 48 по сигналу «ДА и по сигналу «НЕТ управляют двигателем 5, выключают топливо в отдельные цилиндры 38, закрывают заслонку 32, контролируют скорость 6 и проверяют условия , продолжают утилизацию 42 и сигнализируют 35.
При регулировании давления воздуха
и скорости (фиг. 7) измеряют давление 35
и проверяют условия ( ) по сигналу «ДА, выключают топливо 38, закрывают 39 и тормозят утилизатором 49
заслонку ЗУ и тормозят утилизатором по сигналу «НЕТ и открывают заслонку 34, включают топливо 50 и управляют краном 51, тормозят, проверяют скорость 11 по сравнению с целевым 52 значением и критической 30 скоростью и решают вопрос управления торможением 53 с подачей сигнала 54.
При торможении педалью (фиг. 8) измеряют 55, проверяют знак 45, выключают топливо 38 и закрывают заслонку 39 по сигналу «ДА или закрывают заслонку 34 и утилизируют энергию по сигналу «НЕТ, проверяют ускорения У 27, 28 для торможения 56,
ряют ускорения У 27, 28 для торможения 56,
остановки 22 в конце 23. При этом отклонение давления от целевого значения 13 требует регулирования двигателем в режиме утилизатора или подключения тормозов колес до полной остановки.
При управлении утилизатором и формировании скоростного режима в различных условиях (фиг. 9) проверяют знак 40 и значение нагрузки, сравнивают с целевыми значениями 57, управляют утилизатором 42 ики N, разбаланс опорных реакций А , тормозами 29 или по сигналам сравнения 26крен р, скорость выравнивания ш . двигателем. При нагрузке, соответствующейскоростей Др, радиус поворота R, на груз- целевой 58, работу продолжают, а при сиг-ку М, Рс, коэффициент тяги фг и состояние нале «НЕТ обеспечивают управление двига- 5 контура защиты и безопасности. При этом телем, трансмиссией и тормозами при непре-используют известные регулировочные вин- рывном согласовании 59 формы траекторииты, сопротивления, оборудование и прибо- о,, радиуса поворота R нагрузки а и ско-ры настройки, диагностики, дождемер с кон- рости. При нулевом или ином радиусе 60 итактами. При регулировании скорости с ученормальном давлении 61 обеспечивают согласование скорости, нагрузки и радиуса 62, 10 скорости и траектории 63 радиуса и скорости 64. При ином давлении двигатель переводят в режим 65 компрессора.
Поэтому скорость 6 измеряют и сравнитом траектории движения агроробот останавливают 76 при наличии одного из условий
, о), , , , 0, по сигналу «ДА проверяют параметры 78
вают с оптимальной 66 и критической 67 15 формируют сигнал 79 о нормальной работе,
по сигналу «НЕТ сравнивают 80 и формируют 81 значения скорости с учетом параметров - аргументов или корректируют настроечные параметры 82. Такой способ удовлетворяет различным способам и радиусам
лируют коэффициент тяги рт 14 и эффектив- 20 поворота. Сигнал 77 подается при отсутствии ности тяги ф, 15, скорости 6, 8, 9 для работы сигнала Ду-0, , когда остановка
связана не с переключением поступательного движения на поворотное для движения в обратном направлении, а с инициацией
для получения информации для торможения 29 или продолжения работы. При регулировании скорости и поворачивающих элементов в зависимости от радиуса поворота R (фиг. 10) проверяют значение 68 и контров режиме утилизатора 42 или тормоза 29, проверяют радиус поворота 59, 60 и осуществляют поворот в зависимости от радиуса
поворачивающими моментами 69, 70, изме- 25 обслуживания и устранением аварийных
ряют и проверяют 71, 72 ведущий момент по сравнению с поворчивающими для торможения или продолжения работы.
В общем виде интерпретации согласования процессов регулирования, скорости, поситуаций. Аналогичное обслуживание требуется при сигнале «ДА на выходе блока 80 для коррекции 82 параметров с той лишь разницей, что возможно продолжение работы при условии компенсации неточностей и отпил 11 LJUUCV -WD utl у Jin L/VJDCiiiri л, i ii, iiv
ворота стабилизации опорных реакций, на- 30 сутствии сигнала. Наличие сигнала о нулевой
разности скоростей при нулевом радиусе поворота исключает сигнал С 77, если кинематика движения агрегата предусматривает такой поворот. При ином значении радиуса поворота условия также требует сигнала
грузки, утилизации энергии, возникновения и устранения крена, торможения, расхода топлива, защиты и безопасности вводят 73 параметры давления Р (фиг. 11) мощность N , разбаланс опорных реакций AG, крена Р , скорости выравнивания оЈ, нагрузки М, Рс, 35 взаимозависимости и взаимовлияния элементов при осуществлении способа управления, как это показано на фиг. 12, 13, 14, 15, согласования работы известных автономных элементов.
На фиг. 12 графической интерпретации способа согласования работы элементов
управления сигнал (команда) управления 83 подается для реализации с покоэффициента эффективности тяги фэ, качества технологического процесса К.ТП, натяжения контура защиты Нг дежденера Д измеряют давление 74 Р, нагрузку Nc, разность опорных реакций AG, крен р, 40 скорость выравнивания рамы шс, разность скоростей бортов Ли, радиус поворота R , нагрузку М, Рс, коэффициент тяги фт и натяжение нити контура защиты Нт, Д, проверяют и формируют сигмощью прямых и обратных связей 84 регулятора 85, двигателя 86, способнонал 75 о необходимости остановки на вы- 45 го работать в режиме утилизатора, муфки N, разбаланс опорных реакций А , крен р, скорость выравнивания ш . скоростей Др, радиус поворота R, на груз- ку М, Рс, коэффициент тяги фг и состояние контура защиты и безопасности. При этом используют известные регулировочные вин- ты, сопротивления, оборудование и прибо- ры настройки, диагностики, дождемер с кон- тактами. При регулировании скорости с учетом траектории движения агроробот останавливают 76 при наличии одного из условий
, о), , , , 0, по сигналу «ДА проверяют параметры 78
формируют сигнал 79 о нормальной работе,
обслуживания и устранением аварийных
ситуаций. Аналогичное обслуживание требуется при сигнале «ДА на выходе блока 80 для коррекции 82 параметров с той лишь разницей, что возможно продолжение работы при условии компенсации неточностей и от
сутствии сигнала. Наличие сигнала о нулевой
сутствии сигнала. Наличие сигнала о нулевой
разности скоростей при нулевом радиусе поворота исключает сигнал С 77, если кинематика движения агрегата предусматривает такой поворот. При ином значении радиуса поворота условия также требует сигнала
взаимозависимости и взаимовлияния элементов при осуществлении способа управления, как это показано на фиг. 12, 13, 14, 15, согласования работы известных автономных элементов.
мощью прямых и обратных связей 84 регулятора 85, двигателя 86, способно











Изобретение относится к сельскому хозяйству, в частности к способам автоматического управления тракторным агрегатом или самоходной сельскохозяйственной машиной. Цель изобретения - повышение эффективности и безопасности вождения путем оптимизации скорости движения агроробота. Сначала измеряют величину отклонения курса агроробота от базовой линии, осуществляют поворот в конце гона, определяют величину и знак нагрузки и формируют скорость движения. Кроме того, в зависимости от величины управляющего сигнала регулируют расход топлива, передаточное число трансмиссии и тормозной момент утилизатора. Сопротивление утилизатора увеличивают пропорционально отрицательной нагрузке. Измеряют ускорение при возрастании скорости. Согласовывают силы трения муфты сцепления и синхронизатора коробки передач в момент переключения скоростей, а в конце гона снижают, в свою очередь, скорость движения агроробота синхронно с уменьшением радиуса поворота. Измеряют текущее значение коэффициента эффективности тяги и в зависимости от его величины устанавливают минимальную скорость движения. Одновременно измеряют коэффициент бокового смещения, ширину колес, скорости возникновения крена и выравнивания опорных реакций, формируют соответствующие управляющие сигналы, с учетом которых устанавливают максимальную скорость движения агроробота. 21 ил.
ходе «ДА, останавливают 76 с подачей сигнала 77 если , (, , , , , или поворачивают при , , проверяют оптимальность параметров 78 для выдачи сигнала 79 о нормальном функционировании с выхода «ДА, сравнивают параметры 80, проверяют, сравнивают и согласовывают параметры и регулируют скорость 81 с учетом различных процессов и факторов, включая коэффи50
ты сцепления 87, коробки передач 88 и тормозов 89 агрегата 90 с обратной связью 91. Согласованность процессов и работы проверяют при работе отдельных органов, например, при воздействии на педаль 92 (фиг. 13) прямые 93 и обратные 94 связи, регулятор 85, заслонка 95, двигатель-утилизатор 86, коробка передач 88 и тормоза 89 останавливают агрегат 90 путем частичной утилизации энергии замедления хода. При
циент бокового сцепления ц,, ширину колеи В, 55воздействии на -механизм поворота 96
боковую силу Ps, торможение Т и качество(фиг. 14) связи 97 направляющего колеса 98,
технологического процесса по сигналу «НЕТ делителя потока энергии 99 между бортами,
и корректируют путем технического обслу-коробки передач 88, регулятора 85, тормоза
живания давление 82 Р, мощность нагруз-89 агрегата 90 и с его колесом 91, 98 за0
ты сцепления 87, коробки передач 88 и тормозов 89 агрегата 90 с обратной связью 91. Согласованность процессов и работы проверяют при работе отдельных органов, например, при воздействии на педаль 92 (фиг. 13) прямые 93 и обратные 94 связи, регулятор 85, заслонка 95, двигатель-утилизатор 86, коробка передач 88 и тормоза 89 останавливают агрегат 90 путем частичной утилизации энергии замедления хода. При
дают траекторию движения полуагроробота применительно к внешним условиям.
Механизм поворота управляет коробкой скоростей в аспекте регулирования скорости поступательного движения, но орган
100управления коробки передач (фиг. 15) не влияет на поворот. Поэтому регулятор 85, двигатель 86, сцепление 87, синхронизатор
101коробки передач 88, тормоз 90 агрегата обеспечивают согласование работы в период переключения скоростей так, чтобы при переключении с разрывом потока мощности разность скоростей соединяемых деталей снижалась до нуля и обеспечивала эффект синхронизации согласованием работы регулятора, двигателя, сцепления, коробки передач и тормоза. Способ предусматривает исключение питания органов управления после согласованного действия в переходном режиме управления энергопотоком.
Взаимосвязь и взаимовлияние процессов при регулировании скорости агроробота, мобильного сельскохозяйственного агрегата можно характеризовать математическим выражениям V RS/Bt RbV/B By,ft/bV я/ ш/Ър яЯю/;р ш Д//О М о К/Р К, (2jiR-Ul)B - P4gR/ G N/(, где R - радиус поворота; S -длина линии поворота; В - ширина колеи; i - время; А К - разность скоростей; р. - коэффициент бокового сцепления, g - ускорение свободного падения, - относительный радиус поворота, со - угловая скорость поворота; р - угол склона или крена неповоротной рамы; ар - угол поворота; i - число поворотов рамы склонохода в период разворота или поворота; К - коэффициент формы линии поворота; ш - скорость выравнивания рамы; М - момент силы; Р - сила давления; Vn - скорость смещения осей; Ш - ширина захвата агрегата; Рч - центробежная сила; G - сила тяжести; N - мощность, фэ - коэффициент эффективности тяги; Р - сила тяги на крюке (крюковая сила); б - буксование.
Множество параметров, ограничивающих скорость, указывает на целесообразность учета различных условий при ее оптимизации. Из этих формул вытекает условие ограничения движения радиусом поворота, шириной колеи, коэффициентом бокового сцепления шин с почвой, скоростями возникновения крена, выравнивания опорных реакций, смещения осей, крутизной склона, формой поворота, мощностью, крюковой силой, угловой скоростью сателлита дифференциала. Зависимость скорости от множества параметров характеризует, что для получения наивыгоднейшего режима обеспечивают выбор закона регулирования скорости в зависимости от знака нагрузки и других неоднозначно влияющих параметров и поиск безопасного и экономичного значения в зависимости от условий и параметров, влияющих на взаимосвязанные процессы: регулирования скорости в тяговом и тормозном режимах, упреждающего регулирования момента нагрузки, торможения, утилизации энергии торможения, стабилизации опорных реакций, поворота и разворота в соответствии с установленной кинематикой движения агрегата, регулирования и стабилизации курса при работе в гоне и движе0 нии на поворотной полосе. В предложенном способе на регулирование момента нагрузки и скорости на процесс управления по упреждающему сигналу накладывается процесс стабилизации нагрузки, снижения
частоты работы регулятора, поиск программы регулирования. Процесс поиска программы регулирования скорости включает измерение и проверку изменения регулируемой величины, управление утилизатором энергии колебания, закрытие заслонки пропорцио0 нально отклонению фактического значения скорости от экономичной или от задаваемой водителем. Для коррекции параметров настройки (подстройки) в начале эксплуатации и получения ж елаемого качества техg нологического процесса предусматривают соответствующие винты, регулировочные и прочие известные устройства и способы. При повороте параметры курса закономерно изменяются. Поэтому вместо ручной настройки разности скоростей можно вклю0 чить программную настройку параметров по заданному радиусу поворота.
В любое время скорость может быть согласована со всеми параметрами траектории, нагрузочного режима, свойствами
5 почвы, реакциями и качеством технологического процесса (фиг. 11) и формулами. В способе осуществляют согласование управления двигателем, коробкой скоростей, муфтой сцепления, тормозами, стабилизатод ром опорных реакций, рабочими орудиями, контуром защиты. Момент времени изменения скорости, моменты от сил трения муфты и синхронизатора согласуют изменением разности крутящих моментов и скоростей соединяемых деталей органом управления до до5 стижения нулевого значения разности скоростей, при которой переключают скорость, после чего согласуются процессы повышения расхода топлива и степени замыкания муфты с учетом жесткости приводов двигателей и системы управления. Измерение пара0 метров, проверка их значений и знака, степень влияния друг на друга, как это показано в графической и математической интерпретации, создают основу действия бортовых микропроцессоров управления и мониторов
g согласования процессов управления различными известными автономными системами и элементами мобильной техники. Это и возможность получить информацию об аварийном значении параметров при формировании
траектории и режима обеспечивают повышение эффективности и безопасности работы. Блоки 3, 6, 10, 13, 17, 20, 21 характеризуют изменение нагрузки скорости, курса, ошибки, свойств почвы, пути, числа проходов и ускорений для формирования сигналов блоками 4, 8, 9, 12, 16, 18, 21, 25, 28 корректирования элементами 5, 26, 29 и согласования 7 (фиг. 1, 2). Скорость снижается утилизатором 31, 32 торможением 22 (фиг. 3). Давление воздуха в системе утилизации поддерживается заслонкой 34, контролируется 35, 36 и корректируется 37, 38, 39 при повышении и регулируется регулятором 43, 44,45 и предохранительным клапаном (фиг. 4 5), утилизируя по сигналу о знаке 40, 42 или отбором мощности 41. Нагрузку 46 (фиг. 6) в тяговом режиме корректируют двигателем и трансмиссией 26, 47, 48 или торможением
5,38, 32, контролируя и проверяя скорость
6,9 утилизатором 42 и информируя об этом 35. Давление проверяется 35, 36 (фиг. 7), повышается 38, 39, утилизируется 49 по сигналу «ДА или заслонкой 34, топливом 50 и краном 51 торможения с проверкой скорости торможением 52, 53, 54. При нажатии на педаль (фиг. 8) обеспечивается регулирование топлива 38, заслонки 39 и тормоза 56. Нагрузка проверяется (фиг. 9) и утилизируется 42 торможением 29, согласуют скорость с курсом, радиусом и нагрузкой 59, 60, 61, 62, 63, 64, 65, после чего проверяется скорость 66, 67. Скорость на повороте (фиг. 10) регулируется с учетом нагрузки 3, 4 свойств почвы 14, 68 для обеспечения радиуса 59, 60 поворачивающими и ведущими моментами 69, 70, 71, 72. Настройка (фиг. 11) на целевое значение параметров 73, измерение 74, проверка 75 для остановки 76, проверка 78 нормальной работы 79 или проверка 80 для согласования скорости 81 с учетом всех факторов или коррекции 82 обеспечивается путем согласования работы органов управления (фиг. 12) скоростным режимом 83 прямыми и обратными связями 84, 91 между регулятором 85, двигателем- утилизатором 86, муфтой сцепления 87, коробкой передач 88 и тормозов 89 агрегата 90. При воздействии на педаль 92 (фиг. 13) прямые 93 и обратные 91, 94 связи регулятора 85, заслонки 95, двигателя-утилизатора 86, коробки передач 88 и тормоза 89 агрегата 90 обеспечивают согласование работы в режиме утилизации энергии замедления. Механизм поворота 96 (фиг. 14) связан 97 с направляющим колесом 98, делителем потока энергии 99, коробкой передач 88, регулятором 5 и тормозом 89 агрегата прямо и обратно 91, а элементы управления взаимосвязаны и взаимодйствуют при выполнении функций и параметрами силового потока (фиг. 12, 13). Это обеспечивает минимизацию ошибок при формировании траектории движения в режиме полуагроробота применительно к внешним условиям и ароробота.
Орган управления 100 (фиг. 15) коробкой передач зависит от механизма поворота и не может повлиять на процесс поворота. Это гарантирует регулирование параметров режима для обеспечения точности выполнения траектории так, чтобы траектория определяла режим и исключила влияние скорости на траекторию, если такой команды нет со стороны человека. Синхронизатор 101 -обеспечивает согласование скоростей соединяемых
0 элементов в период переключения скоростей механической трансмиссии или процесс перехода на новых режим в немеханических передачах.
Вариант выполнения устройства для реализации способа согласования работы регулятора 86 двигателя муфты сцепления 87 (фиг. 16) включает сервомеханизм 102 управления муфтой сцепления 87, распределитель 103 которой связан тягой 104 с распределителем 105 управления исполнительным ци0 линдром 106 для перемещения вилки 107 и каретки 108 синхронизатора 101 для перемещения посредством колец 109 сухарей 110 трения в виде штифтов, входящих в отверстия 111 установленной на валу 112 свободно
5 на втулке 113 шестерни 114 с дорожкой 115 трения. Связь в виде рычага и тяги 84 с регулятором 85 для согласования управления муфтой 87 и двигателем обеспечивает при работе сервомеханизма 102 путем подачи рабочего материала (воздуха или жидкости)
0 распределителем 103. Тяга 104 согласовывает работу с распределителем 105 органа управления 83 или 100 при переключении скорости, для чего в цилиндр 106 подается рабочий материал, и вилка 107 с кареткой 108 перемещаются вправо и влево. Это усилие
5 передается кольцами 109 сухарям 110, которые при входе в отверстия 111 жестко соединяют вал 112 с шестерней 114 через обойму 116 и включают желаемую скорость. Так включаются и другие передачи. Переключение передач осуществляется перемеще0 нием каретки 108 и обоймы 116 в другую сторону, например, к шестерне 117. В период переключения скоростей силы трения сухарей 110 с дорожки 115 трения шестерни обеспечивают эффекты синхронизации. Этот
5 эффект синхронизации повышается тем, что дорожки 115 имеют криволинейную поверхность (в виде впадин и выступов) по кругу радиусом, равным радиусам осей сухарей 110. Сухари ПО и дорожки 115, являясь трущимися поверхностями синхронизатора
0 Ю1, создают пропорциональной силе давления на них момент трения. Этот момент способствует выравниванию скоростей соединяемых элементов (шестерни 114 с обоймой 116, установленной на шлицах вала 112). В нейтральном положении сухари ПО не
5 касаются шестерен 114, 117, а в рабочем соединяется с одной из шестерен. Другие процессы работы синхронизатора 101 аналогичны известным.
алгоритм согласования управления агре- га гом в период переключения скоростей (фиг. 17) показывает взаимосвязь и взаимовлияние элементов и процессов при реализации предложенного способа управления. Здесь способ управления включает операции настройки 118, проверки моментов ведущей и ведомой частей 119 и их разности 120, 121, снижение ведущего момента 122 муфтой сцепления и двигателем 123, снижение расхода
натяжение тяги, известные способы гасят колебания. При повышении сопротивления, орудий пружина 137 тягой 148 перемещает орган управления коробкой передач 141 в сторону снижения скорости, а при снижении силы сопротивления повышает скорость. Каждому значению сопротивления соответствует определенное сжатие пружины 137 и положение рычага коробки передач 141 и скорость движения. Указатель 146 информирует
топлива 124, повышение давления на трущей- 1° о настройке положения ролика 147 по сигна- ся поверхности и момента трения синхро- лу блока 138 или при ручной настройке на низатора 125 до достижения момента нагруз- режим нагружения и скорости движения.
ки. При этом скорости соединяемых элементов 126 измеряются: снижается скорость
По мере опускания ролика 147 возрастает, а подъема - снижает скорость движения
ведущей части 127, повышается скорость 1(- и задает режим нагрузки двигателя. Отноведомой 128 и разность скоростей 129 приближается к нулю 130, когда по сигналу «ДА переключается скорость 131, повышается моменты ведущей части, муфты сцепления и расход топлива и скорость 133,
которая может быть проверена 134 для полу- 20 коробки, тормоза, орудия, чения информации 135 о нормальном функционировании или продолжении управления в зависимости от изменения внешних условий.
сительно этого исходного режима регулируется скорость по входным координатам в виде силы сопротивления или момента нагрузки коробкой (фиг. 21) или утилизатором, в каждом случае согласовывает работу двигателя,
Формула изобретения
Способ управления агророботом, вклю- 25 чающий измерение величины отклонения курса агроробота от базовой линии, поворот в конце гона, определение величины и знака нагрузки, формирование управляющего сигнала и регулирование курса и скорости движения агроробота, отличающийся тем, 30 что, с целью повышения эффективности и безопасности вождений путем оптимизации скорости движения агроробота, в зависимости от величины управляющего сигнала регулируют расход топлива, передаточное число трансмиссии и тормозной момент ути- 35 лизатора, при этом измеряют отрицательную нагрузку и увеличивают сопротивление утилизатора пропорционально измеренной величине отрицательной нагрузки, затем измеряют ускорение агроробота и осуществляют торможение до момента его ликвидации при возрастании скорости, согласовывают силы трения муфты сцепления и синхронизатора коробки передач в момент переключения скоростей и синхронно с уменьшением радиуса поворота в конце гона
В процессе компенсации изменения сопротивления орудий путем регулирования скорости и стабилизации нагрузки двигателя (фиг. 18) измеряют буксование Б 136 и сопротивление Р 137, вычисляют коэффициент эффективности тяги фэ /эс/0б 138, определяют максимум, проверяют режим 139 (тормозной, тяговый), управляют регулятором 140 и коробкой передач 141 или тормозом-утилизатором 142.
При стабилизации нагрузки двигателя без измерения сопротивления орудий, по интегрированной входной координате в виде момента нагрузки (фиг. 19) измеряют буксование Б 136, момент нагрузки 143, вычисляют 144 коэффициент эффективности тяги
р Mir}/rkG8
Способ управления агророботом, вклю- 25 чающий измерение величины отклонения курса агроробота от базовой линии, поворот в конце гона, определение величины и знака нагрузки, формирование управляющего сигнала и регулирование курса и скорости движения агроробота, отличающийся тем, 30 что, с целью повышения эффективности и безопасности вождений путем оптимизации скорости движения агроробота, в зависимости от величины управляющего сигнала регулируют расход топлива, передаточное число трансмиссии и тормозной момент ути- 35 лизатора, при этом измеряют отрицательную нагрузку и увеличивают сопротивление утилизатора пропорционально измеренной величине отрицательной нагрузки, затем измеряют ускорение агроробота и осуществляют торможение до момента его ликвидации при возрастании скорости, согласовывают силы трения муфты сцепления и синхронизатора коробки передач в момент переключения скоростей и синхронно с уменьшением радиуса поворота в конце гона
где /, т - передаточное число и КПД трансмиссии; гк - радиус качения колеса, определяют максимум и режим 145, управляют регулятором 140 и коробкой передач 45 снижают скорость движения агроробота, 141 или тормозом-утилизатором 142. При определяют текущее значение коэффициента
эффективности тяги и в зависимости от его
этом управляют режимами настройки (пределами регулирования).
Средство стабилизации нагрузки двигателя (фиг. 20) содержит указатель 146 настройки и перемещения ролика 147 натяжения гибкой тяги 148 связи пружины 137 измерения силы Рс сопротивления орудий для управления коробкой передач 141 и тормозом 149. Возвратная пружина 150 поддерживает
величины устанавливают минимальную скорость движения агроробота и одновременно измеряют коэффициент бокового сцепления, 50 скорость возникновения крена и выравнивания опорных реакций и формируют соответствующие управляющие сигналы, на основании которых корректируют значение максимальной скорости движения агроробота,.
натяжение тяги, известные способы гасят колебания. При повышении сопротивления, орудий пружина 137 тягой 148 перемещает орган управления коробкой передач 141 в сторону снижения скорости, а при снижении силы сопротивления повышает скорость. Каждому значению сопротивления соответствует определенное сжатие пружины 137 и положение рычага коробки передач 141 и скорость движения. Указатель 146 информирует
о настройке положения ролика 147 по сигна- лу блока 138 или при ручной настройке на режим нагружения и скорости движения.
о настройке положения ролика 147 по сигна- лу блока 138 или при ручной настройке на режим нагружения и скорости движения.
По мере опускания ролика 147 возрастает, а подъема - снижает скорость движения
и задает режим нагрузки двигателя. Отнокоробки, тормоза, орудия,
сительно этого исходного режима регулируется скорость по входным координатам в виде силы сопротивления или момента нагрузки коробкой (фиг. 21) или утилизатором, в каждом случае согласовывает работу двигателя,
рмоза, орудия,
Формула изобретения
коробки, тормоза, орудия,
Способ управления агророботом, вклю- чающий измерение величины отклонения курса агроробота от базовой линии, поворот в конце гона, определение величины и знака нагрузки, формирование управляющего сигнала и регулирование курса и скорости движения агроробота, отличающийся тем, что, с целью повышения эффективности и безопасности вождений путем оптимизации скорости движения агроробота, в зависимости от величины управляющего сигнала регулируют расход топлива, передаточное число трансмиссии и тормозной момент ути- лизатора, при этом измеряют отрицательную нагрузку и увеличивают сопротивление утилизатора пропорционально измеренной величине отрицательной нагрузки, затем измеряют ускорение агроробота и осуществляют торможение до момента его ликвидации при возрастании скорости, согласовывают силы трения муфты сцепления и синхронизатора коробки передач в момент переключения скоростей и синхронно с уменьшением радиуса поворота в конце гона
снижают скорость движения агроробота, определяют текущее значение коэффициента
величины устанавливают минимальную скорость движения агроробота и одновременно измеряют коэффициент бокового сцепления, скорость возникновения крена и выравнивания опорных реакций и формируют соответствующие управляющие сигналы, на основании которых корректируют значение максимальной скорости движения агроробота,.
w
tpue.1
м/зн
CZED
г гп&
шзм
(7)
Z9S9SSI
С )
LSntf
/ i /
СГ)
ffzntf
/999SSI
U/3#
zgggs9i
Фиг. 10
Фиг. 12
Фиг. 13
Фиг. 14
103 /04
ferim/
Лтт 7
Фиг.М
105
Фиг. 16
Фиг. 17
Фиг. 18
фиг. 19
т т
/
//////// Фиг. 20
Лг
Лл1.
V Т
о-
| Способ управления мобильным агророботом | 1986 |
|
SU1393334A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
