Изобретение относится к сельскому хозяйству, а конкретнее к способу и устройству управления агрегатом, и машинам для обработки почвы, рыхления грунта и уничтожения сорной растительности.
Известны способ и устройство управления агрегатом с плоскорезами для рыхления почвы и уничтожения сорняков без оборота пласта с максимальным сохранением пожнивных остатков для снижения эрозии почвы. Плоскорезы имеют на раме стойки большое сопротивление и уплотнение почвы, а также трудность прочесывания сорняков и очистки рабочих органов усиливают энергозатраты, а трудность совмещения функций усугубляет этот недостаток. Оценка пути, скорости, площади, распределения и расхода материалов по частоте вращения вносит ошибку из-за буксования, достигающего 17-50%
Наиболее близким прототипом предложенного объекта является агрегат, реализующий способ обработки почвы перемещением рабочих органов относительно энергетического модуля для получения движущей силы.
Трудности противоэррозионной обработки почвы борьбы с сорной растительностью и совмещения операций рыхления, защиты почвы и сбора корневищных сорняков, ограничивают возможности широкого использования в различных условиях. Буксование ведущего колеса затрудняет определение пути, скорости, площади и удельного расхода материала и топлива.
Целью изобретения является устранение упомянутых недостатков и снижение буксования, металлоемкости и тягового класса, облегчение вождения, повышение точности, надежности и ресурса.
Поставленная цель достигается тем, что в качестве регулируемого параметра используют энергопоток к рабочим органам технологического модуля, при этом в качестве источника движущей силы используют толкатель.
В качестве прокладчика маршрута, дорожки для движителей, следа и базовой линии используют рабочий орган, при этом прокладчик следа и энергетический модуль движутся по краям захвата технологического модуля.
Борозду используют в качестве маркерной линии для вождения широкозахватного агрегата. Ведущее колесо работает в режиме свободного качения, датчика действительной скорости, пути, площади и удельного расхода топлива и других материалов на единицу пути и площади.
Энергетический модуль расположен на границе захвата агрегата. Рабочий орган имеет стройку-толкатель в виде почвенного крыла и две режущие грани для поочередной работы. На границе захвата технологического модуля установлен рабочий орган для прокладки дорожки.
Энергетический и технологические модули соединены с возможностью работы движителей в качестве следоуказателя. Граница захвата используется в качестве маркерной линии.
Основой изобретения являются обобщение, совмещение, согласование и обратимость функций энергопотоков, рабочих органов движителей, средств управления и других элементов агрегата, также энергетического и технологического модулей, способ повышения мощности, производительности без повышения металлоемкости и тягового класса, выполнение энергетическим модулем транспортных и технологических процессов-движение по следу крайнего рабочего органа широкозахватного агрегатов в режиме свободного качения.
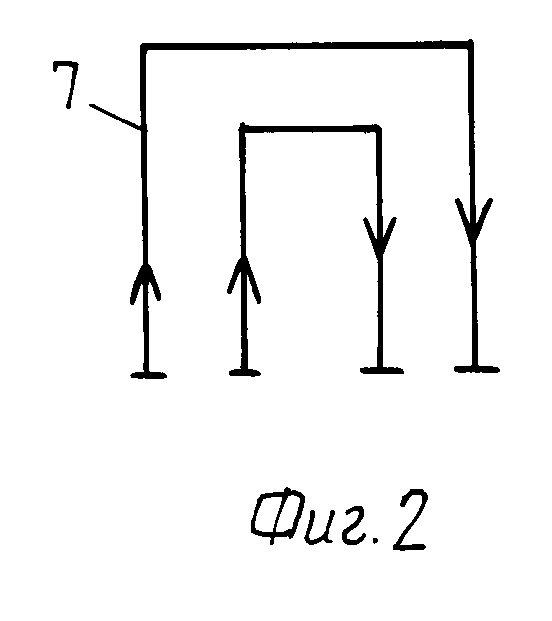
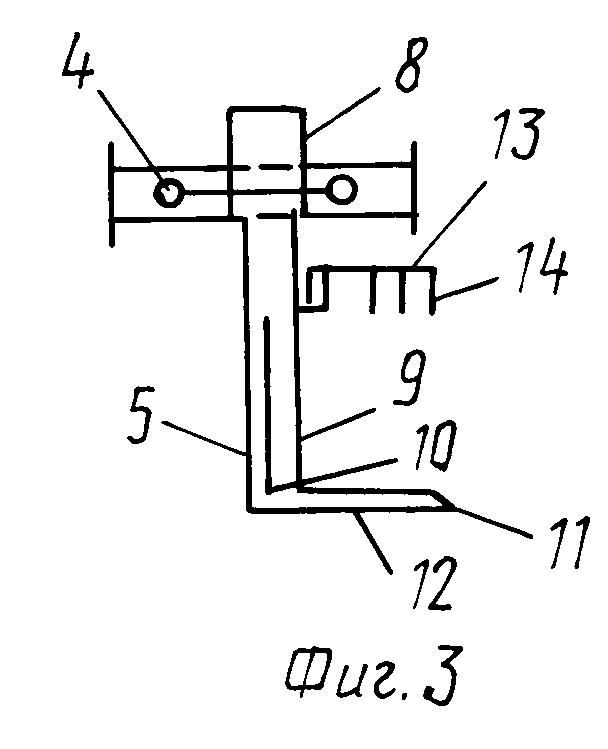
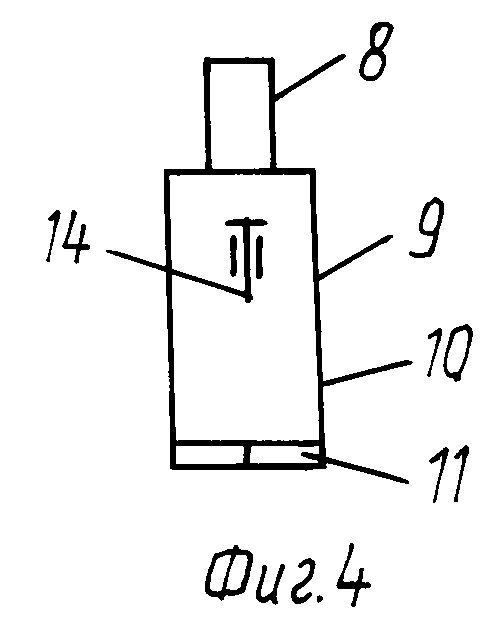
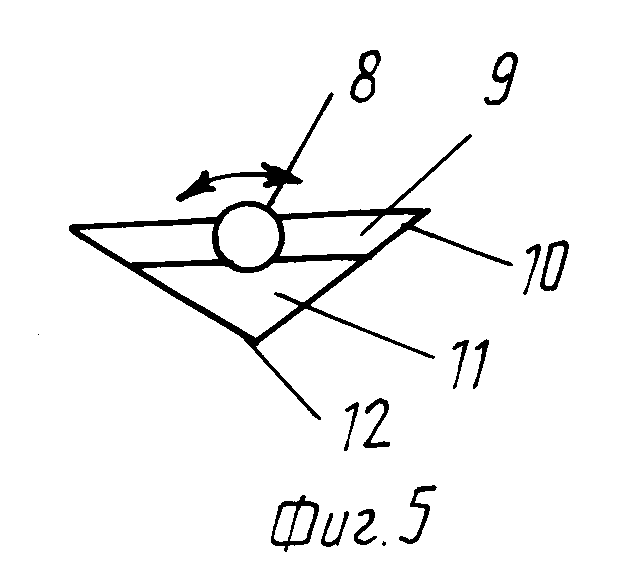
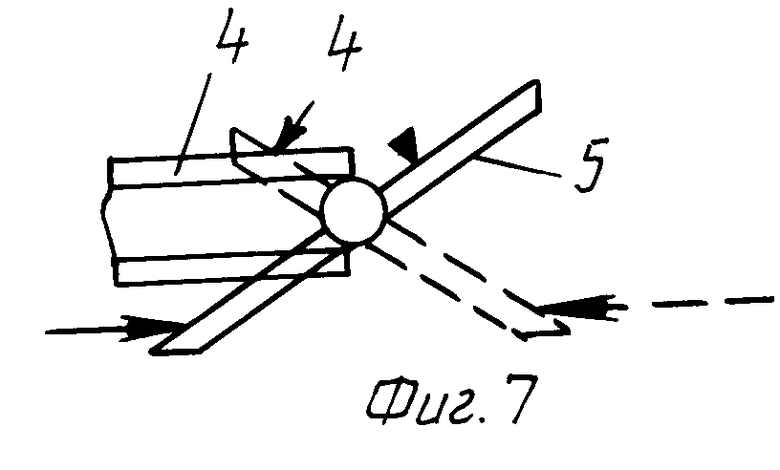
На фиг. 1 чертежа изображена схема агрегата для реализации способа и обработки почвы; на фиг. 2 схема траектории движения; на фиг. 3 схема рабочего органа; на фиг. 4 схема рабочего органа, вид на стойку-толкателя; на фиг. 5 схема рабочего органа, вид сверху; на фиг.6 схема возникновения движущих сил стойки-толкателя-почвенного крыла при его перемещении приводом; на фиг. 7 схема реверсивного возвратно-поступательного движения рабочего органа, как показано стрелками.
Способ управления реализуют устройством, содержащим энергетический модуль 1 (фиг. 1) с валом отбора мощности приводом 2 технологического модуля 3 и возвратно-поступательным приводом 4 секций рабочих органов-движителей 5, на границе захвата которых установлен рабочий орган (корпус плуга) 6 следопрокладчик для вождения по фигурной траектории 7 (фиг. 2).
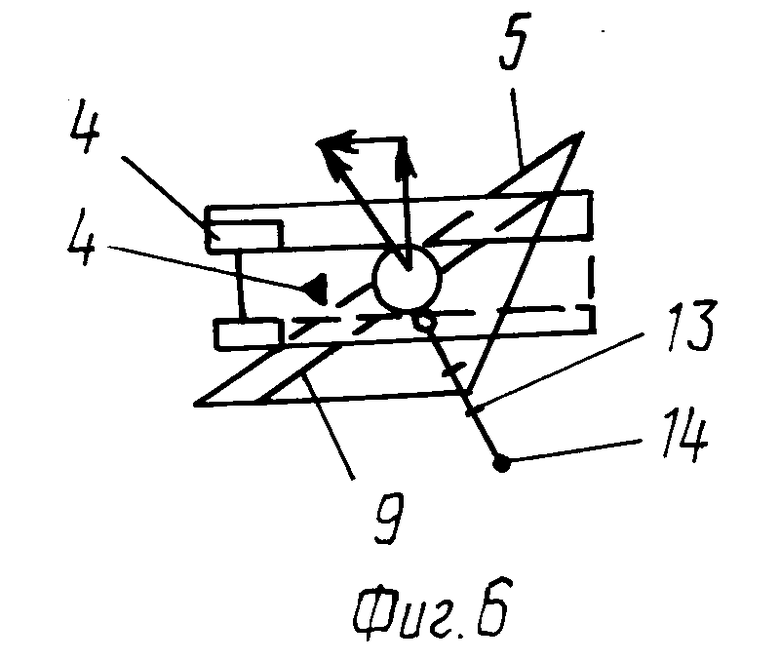
Рабочий орган-движитель 5 имеет ось 8 (фиг. 3, 4, 5) поворота и перемещения, стойку-толкатель 9 с режущими гранями 10 и лемех 11 с режущими гранями 12 для поочередной работы и получения неравновешанной движущей силы при реверсивном перемещении (фиг. 6, 7), а также граблину 13 с зубьями 14.
Энергетический модуль 1 может приводами 2, 4 сообщить рабочим органам 5 возвратно-поступательное движение в противофазе, тянуть корпус 6 для прокладки дорожки, линии полива и движения, а также транспортировать орудие и грузы при соединении с транспортным модулем. Технологический модуль может быть с граблиной для сбора сорняков или без него для сохранения растительности и защиты почвы от эрозии. В каждом случае возможно получение движущей реактивной силы.
Устройство для реализации способа работает следующим образом.
Энергетический модуль 1 в виде мощного и легкого трактора или автомобиля посредством привода 2 обеспечивает энергией технологический модуль 3 и приводом 4 сообщает рабочим органам 5 возвратно-поступательное движение и поворачивает вокруг оси 8 для поочередной работы, поверхностей толкателя 9 и режущих граней 10, 12 его и лемеха 11. При этом выполняются технологические операции и создается реактивная движущая сила. Граблина 13 с зубьями 14 собирает сорную растительность на границе захвата. Угол поворота толкателя и скорость перемещения определяются приводом 4 так, чтобы тыльная сторона стойки имела просвет около стенки почвы, получала толкающую силу, направленную вперед.
Агрегат имеет, как правило, две секции рабочих органов, перемещающихся в противофазе при движении энергетического модуля по траектории 7.
При этом поперечные силы уравновешиваются, а неуравновешенная продольная сила служит движущей. Борозду корпуса 6 используют в качестве дорожки для движения, следа для вождения, маркерной линии и линии полива в южной зоне.
Рабочий орган 6 на границе захвата технологического модуля прокладывает дорожку для колес и следовую линию для вождения широкозахватного агрегата.
Энергетический модуль 1 на границе захвата технологического модуля обеспечивает энергоснабжение, движение по дорожке (следу) и управление режимами при движении по следу прокладчика дорожки. Его движители работают в качестве следоуказателей, борозда используется в качестве маркерной линии, а корпус рабочий орган в качестве маркера широкозахватного агрегата. Движущую силу толкателей используют для тяги прокладчика-дорожки-борозды-линий вождения.
Граблина 13 с зубьями 14 рыхлит почву, собирает сорняки на границе захвата. При противоэррозионной обработке почвы граблина 13 снимается.
Ведущее колесо при качении по дну борозды без буксования работает в качестве датчика действительной скорости. При этом радар и процессор для измерения пути не требуется. В качестве регулируемого параметра используют дополнительную движущую силу, при этом ведущее колесо переводят в режим ведомого и свободного качения с возможностью снижения буксования до нуля и равенства теоретической и действительной скоростей.
V=πDП; S=πDП′, W=S•B, gs=G/S; gW=G/W; π=3,14
где D диаметр ведущего колеса;
V, S, W скорость, путь и площадь;
П диаметр и частота вращения колеса;
S, П путь и суммарное число оборотов колеса;
W, B- площадь и ширина захвата агрегата;
gs удельный расход топлива на путь;
G часовой расход топлива;
gw удельный расход топлива на площадь.
При качении по дну борозды без буксования функции ведущего колеса, датчика скорости и пройденного пути можно получить нормировочные показатели. Ровное дно борозды снижает влияние микрорельефа поля и изменение радиуса качения, допускает расширение, совмещение и согласование функций ведущего колеса, средства контроля, измерения скорости, пути, площади и расхода материалов. Это облегчает регулирование режимов работы по такой информации и оценку удельных показателей расхода топлива и материалов на единицу пути, времени, площади, применение электроники. Разгрузка ведущих колес, снижение погрешности информации и буксования без дополнительного датчика и указателя обеспечивает работу оператора и средств автоматического управления, а также создает условия для познавательной, экономической и экологической оценки, снижения уплотнения почвы, потерь энергии, ресурса и урожая, диагностики и рационального использования материалов.
Когда функции ведущего колеса энергетического модуля, датчика действительной скорости, пройденного пути, обработанной площади и удельного расхода топлива, посевного материала на путь и площадь совмещают, буксование, скорость буксования и действительную скорость измеряют без радаров и без расчета этих параметров.
Качение колеса по ровному дну борозды снижает еще влияние микрорельефа поля на курсовую устойчивость, точность определения скорости, пути, площади и удельных расходов топлива и материалов, а также облегчает вождение по борозде. При формировании траектории водитель или автоводитель сравнивает действительную траекторию с целевой. Отсутствие разницы воспринимается как свидетельство нормального движения. При изменении реакций почвы действие одного борта усиливается, а другого уменьшается, причем разность реакций воспринимается как сигнал отклонения (ошибка) и дают команду (сигнал) бортовым движителям устранить его, движители дают рассогласование действий в сторону устранения последствий различия реакций почвы и снижения ошибки до нуля. Выходной сигнал действий бортов обратным знаком подается на вход управления и реализуется без торможения движителей.
При формировании режима работы ведущего колеса-многофункционального датчика действия рабочих органов-толкателей и источников ведущей силы, а также сопротивлений сравнивают, отклонение работы колеса от режима свободного качения воспринимают как разницу и свидетельство отклонения от нормального изменения как сигнал (ошибку) и дают команду (сигнал) рабочим органам устранить его, рабочие органы регулируют соотношение сил движения и торможения (скорость, глубина почвообработки и т.д.). При отсутствии такой возможности оператор должен изменить структуру рабочих органов или расход материала.
При использовании способа и устройства облегчается движение широкозахватного агрегата и вождение без сложных маркеров и следоуказателя, снижается уплотнение почвы, металлоемкость, число проходов по полю, потери энергии, ресурса и урожая, обеспечивается самоочистка рабочих органов при культивации, прочесывание почвы и уничтожение сорной растительности. Совмещение операций снижает число проходов и уплотнение почвы.
Снижение буксования колеса и погрешности измерения скорости, пути, площади, работы и расхода материалов облегчает применение процессоров, оценку техники, технологий и управление.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2086084C1 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| АГРОМАШИНА | 2004 |
|
RU2342821C2 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И АГРОМАШИНА | 2003 |
|
RU2265298C2 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬХОЗМАШИНЫ | 1989 |
|
RU2023359C1 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2222129C2 |
| СПОСОБ ВЫПОЛНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ И АГРЕГАТ ДЛЯ ЗЕМЛЕДЕЛИЯ | 1992 |
|
RU2092001C1 |
Использование: сельскохозяйственное машиностроение, в частности управление агрегатом при обработке почвы. Сущность изобретения: Способ заключается в вождении агрегата по базовой линии, поворота агрегата в конце гона и регилировании скорости движения и нагрузки. При этом рабочие органы перемещают относительно трактора быстрее, чем вперед, образуют просвет между тыльной стороной рабочего органа и почвой, а реакцию почвы направляют на раму, разгружая ходовую часть трактора. Ведущие колеса трактора направляют по дну борозды, являющейся базовой линией. Колеса трактора агрегата используют в качестве маркеров, а борозду в качестве маркерной линии. Устройство содержит механизмы управления энергосредством и технологическим оборудованием и рабочие органы с возвратно-поступательным приводом. Лемех и стойка каждого рабочего органа для обработки почвы установлены поворотно на подвижной оси. 2 с. и 2 з.п. ф-лы, 7 ил.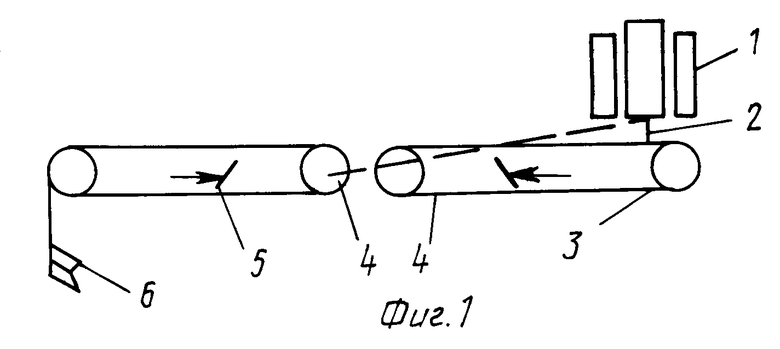
| Справочник по скоростной сельскохозяйственной технике | |||
| - М.: Колос, 1983, с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
