Изобретение относится к сельскому хозяйству, в частности к устройствам автоматического вождения сельскохозяйственных машин.
Известно устройство для автоматического вождения сельскохозяйственной машины по борозде, имеющее щуп с механизмом навески, связанный с гидрораспределителем 1.
Однако данное устройство характеризуется низкой точностью отслеживания борозды и не обеспечивает автоматического разворота- сельскохозяйственной MaujHHbi в конце гона.
Наиболее близким к изобретению является устройство дл автоматического вождения сельскохозяйственной машины, имеющее гидравлическую систему поворота направляющих Ko;iec, с которой шарнирно связан датчик отклонения мащины от направляющей канавки 2.
Недостатком известного устройства является отсутствие возможности автовождения при развороте.
Цель изобретения - обеспечение автоматического разворота сельскохозяйственных мащин в конце направляющей канавки.,
Цель достигается тем, что в устройстве для автоматического вождения сельскохозяйственной машины, содержащем гидравлическую систему поворота направляющих колес, с которой шарнирно связан датчик отклонения мащины от направляющей канавки, имеющий пару копирующих катков, последние установлены последовательно по ходу движения в тележке, вертикальная ось которой расположена на уровне оси движителей и снабжена фиксатором.
На чертеже приведена схема предлагаемого устройства.
Устройство для автоматического вождения сельскохозяйственной машины содержит ведущие колеса 1 с рамой 2, несущей орудие 3, колеса 4, установленные на поворотной оси 5, лопатку 6 на роторе 7 гидромашинь,. червячный сектор 8, золотниковый распределитель 9, насос 10 с баком для рабочей жидкости, червяк 11, телескопическое шлицевое соединение 12 рулевого колеса 13, тягу 14, рычаг 15 и тягу 16 связи с рычагом 17 датчика отклонения, включающего телескопическое звено 18 с упором для тяги или толкания,
сферические шарниры 19 и 20, фиксатор 21, раму 22 для колес 23, направляющие канавки, например лотки 24, для полива сельхозкультур, используемые и в качестве ориентиров для автовождения, упоры 25 для подачи 5 команды на разворот агрегата на одном конце года.
Устройство работает следующим образом.
Поворот колес 1 и рамы 2 относительно
колес 4 и оси 5 в пределах люфта лопатки
0 6 и ротора 7 гидромашины дает сигнал поворота червячного сектора 8, перемещения золотника 4)аспределителя 9 с червяком 11 для относительного поворота осей и исключения сигнала. При ручном управлении колесом 13, а при автовождении - датчиком в усилитель вводится сигнал об изменении курса и отклонении от ориентира посредством тяги 14, рычага 15, тяги 16 и рычага 17. Сигнал вырабатывается рычагом 17 благодаря телескопическому звену 18, толкающему (тянущему) датчик, сферическому шарниру 19 и
0 шарниру 20, блокированному в рамке 22 осей колес 23, за счет копирования колесами 23 лотка 24. Телескопическое звено 18 воспринимает силу сопротивления качению колес 23 по лоткам 24 и обеспечивает откло нение их от орудия.
При отклонении агрегата вправо колеса 4 и ось 5 поворачиваются влево и устраняют сигнал, а при отклонении влево наоборот. Этот принцип вождения соблюдается и при развороте. Колеса 23 датчика на конце лотQ ков 24 контактируют упором 25 и силой их взаимодействия вытягивается фиксатор 21, прекращается блокировка вертикального шарнира 20, дается сигнал в распределитель 9 для поворота оси. В период поворота рычаг 17, телескопическое звено 18,
5 шарниры 19 и 20 работают в качестве датчика кривизны линии и радиуса поворота. Уменьшение радиуса приводит к повороту оси 5 от центра поворота, а увеличение наоборот. После разворота и отхода колес 23 от упора 25 шарнир 20 блокируется фиксатором 21, и осуществляется копирование лотков (базовой линии) на прямых и дуговых участках до следующего упора и конца поля. Высокое качество и постоянство траекторий обеспечивается благодаря слежению колесами датчика за базовыми линиями в
виде лотков одновременно по углу (курсу) и отклонению агрегата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2086084C1 |
| СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023360C1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1980 |
|
SU950212A1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| Копирующее устройство срезающего аппарата капустоуборочной машины | 1979 |
|
SU982574A1 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА УНИВЕРСАЛА | 2014 |
|
RU2577746C2 |
| Устройство для автоматического направления движения самоходной сельскохозяйственной машины | 1980 |
|
SU948308A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ, содержащее О Г) /т 2S 2 232221 20 гидравлическую систему поворота направляющих колес, с которой шарнирно связан датчик отклонения машины от направляющей канавки, имеющий пару копирующих катков, отличающееся тем, что, с целью обеспечения автоматического разворота сельскохозяйственной мащины в конце направляющей канавки, катки датчика отклонения установлены последовательно по ходу движения в тележке, вертикальная ось которой расположена на уровне оси движителей и снабжена фиксатором. О) 4: Ю сх 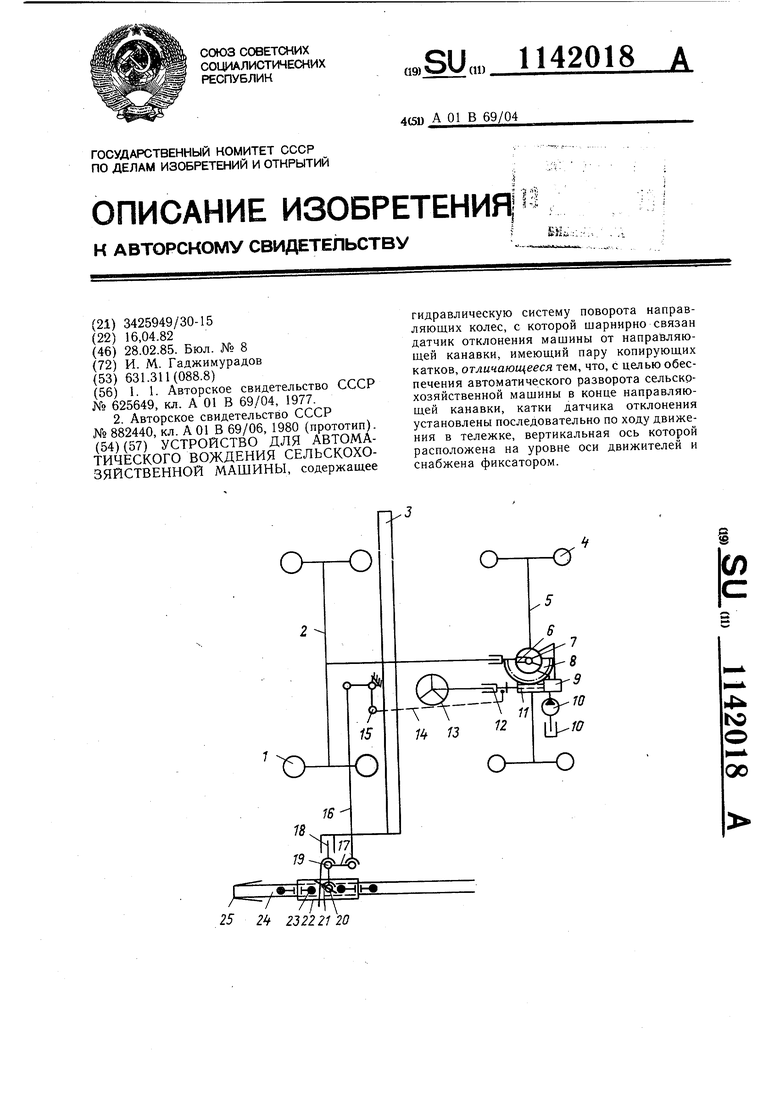
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 625649, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1980 |
|
SU882440A1 |
