Изобретение относится к машинам для сбора и перевозки твердых бытовых отходов.
Известно рабочее оборудование мусоровоза, содержащее кузов с загрузочным отверстием в верхней части, устройство для загрузки мусора в кузов, включающее в себя стрелу, установленную с возможностью поворота в вертикальной плоскости и несущую на себе рамку, смонтированную с возможностью поворота в той же плоскости относительно стрелы, емкость для мусора, закрепленную на рамке и имеющую верхнюю и нижнюю части.
Недостатком известного устройства является невозможность уборки мусора и загрязнений непосредственно с поверхности дороги, что ограничивает область применения и функциональные возможности мусоровоза.
Прототипом изобретения является рабочее оборудование мусоровоза, имеющего кузова с верхним загрузочным окном, содержащее манипулятор, образованный шарнирно закрепленной на раме транспортного средства поворотной в вертикальной плоскости стрелой, рамкой, шарнирно закрепленной на свободном конце стрелы с возможностью поворота гидроцилиндром в вертикальной плоскости относительно стрелы, и двухчелюстным грейферным захватом, челюсти которого посредством горизонтальных осей закреплены с возможностью поворота в вертикальной плоскости на корпусе, который связан с рамкой, причем плоскость поворота челюстей захвата перпендикулярна вертикальной плоскости поворота стрелы. Грейферный захват обеспечивает подбор мусора из куч непосредственно на дороге с последующим высыпанием в загрузочное окно кузова при подъеме стрелы и переворачивании рамки с грейферным захватом, причем разгрузка этого захвата происходит через его верхнее окно.
Недостаток прототипа состоит в том, что для поворота грейферного захвата относительно стрелы и для поворота челюстей захвата используются раздельные гидроцилиндры управления, к каждому из которых по всей длине манипулятора проложены гидравлические магистрали от гидрораспределителя, смонтированного на кузове мусоровоза. Это существенно повышает материалоемкость и снижает эффективность рабочего оборудования мусоровоза.
Изобретение направлено на решение задачи снижения материалоемкости и повышения эффективности рабочего оборудования мусоровоза путем совмещенного управления поворотом грейферного захвата и раскрытием его челюстей.
Для этого рабочее оборудование мусоровоза, имеющего кузов с верхним загрузочным окном, содержащее манипулятор, образованный шарнирно закрепленной на раме транспортного средства поворотной в вертикальной плоскости стрелой, рамкой, шарнирно закрепленной на свободном конце стрелы с возможностью поворота гидроцилиндром в вертикальной плоскости относительно стрелы, и двухчелюстным грейферным захватом, челюсти которого посредством горизонтальных осей закреплены с возможностью поворота в вертикальной плоскости на корпусе, который связан с рамкой, причем плоскость поворота челюстей захвата перпендикулярна вертикальной плоскости поворота стрелы, согласно изобретению снабжено двуплечим рычагом, шарнирно закрепленным на указанной рамке с возможностью поворота в плоскости, перпендикулярной плоскости поворота челюстей, тягой, одним концом связанной с одним из плеч указанного двуплечего рычага, а другим концом связанной посредством пластины с верхними концами распорных рычагов, которые расположены под углом к вертикальной оси грейферного захвата симметрично относительно друг друга и шарнирно соединены нижними концами с челюстями грейферного захвата, причем другое плечо двуплечего рычага связано с указанным гидроцилиндром, а стрела смонтирована на раме с возможностью поворота в горизонтальной плоскости.
Кроме того, нижние концы распорных рычагов размещены между указанными горизонтальными осями, а челюсти грейферного захвата соединены между собой пружинами растяжения. Рабочее оборудование снабжено закрепленным на рамке ограничительным упором поворота двуплечего рычага. Воздействием гидроцилиндра на двуплечий рычаг обеспечивается поворот челюстей грейферного захвата, который сопровождается растяжением пружин, а затем поворот этого захвата относительно стрелы для перегрузки мусора в кузов мусоровоза.
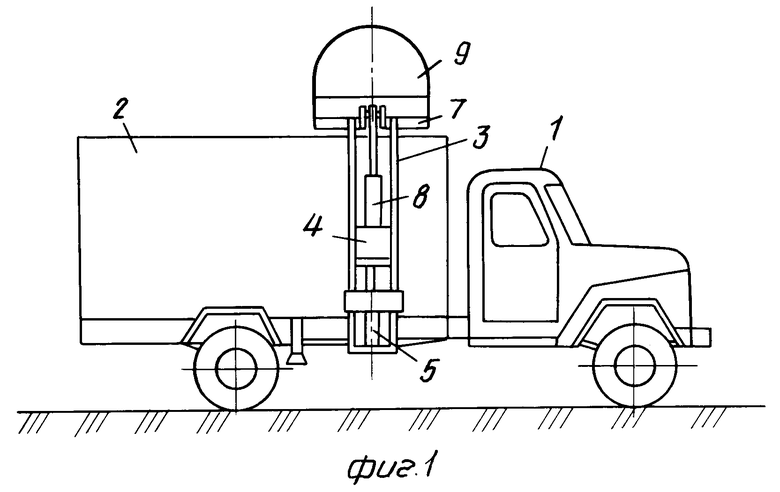
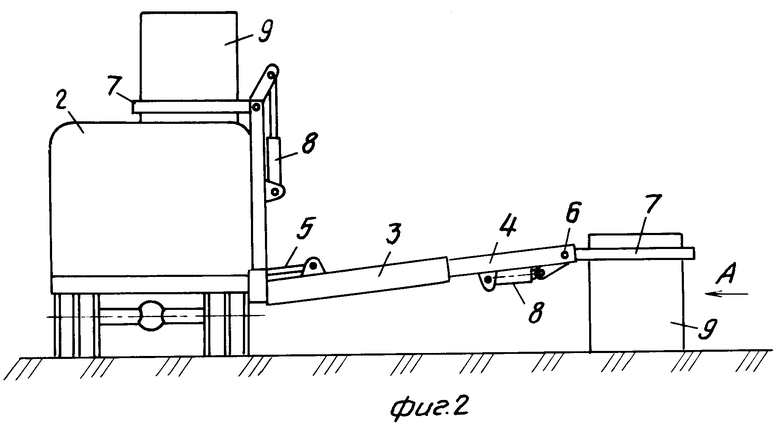
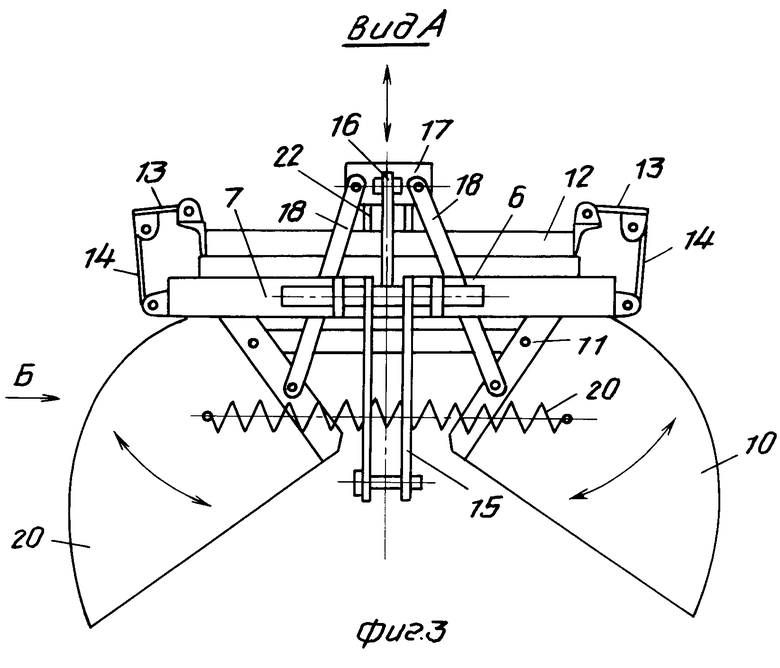
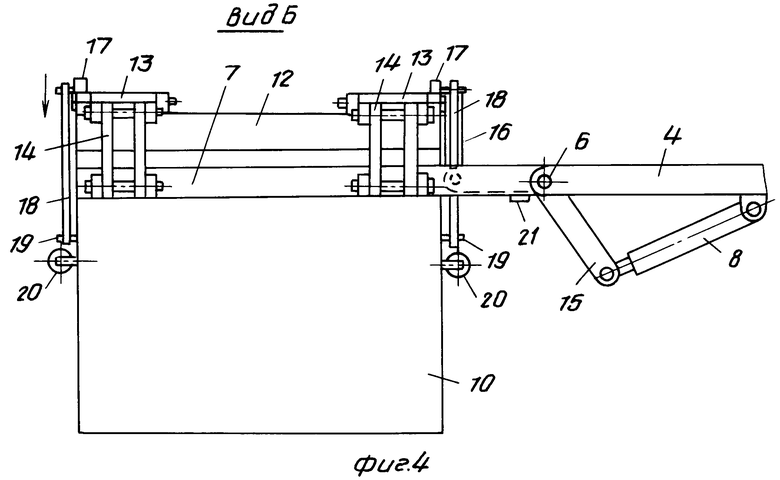
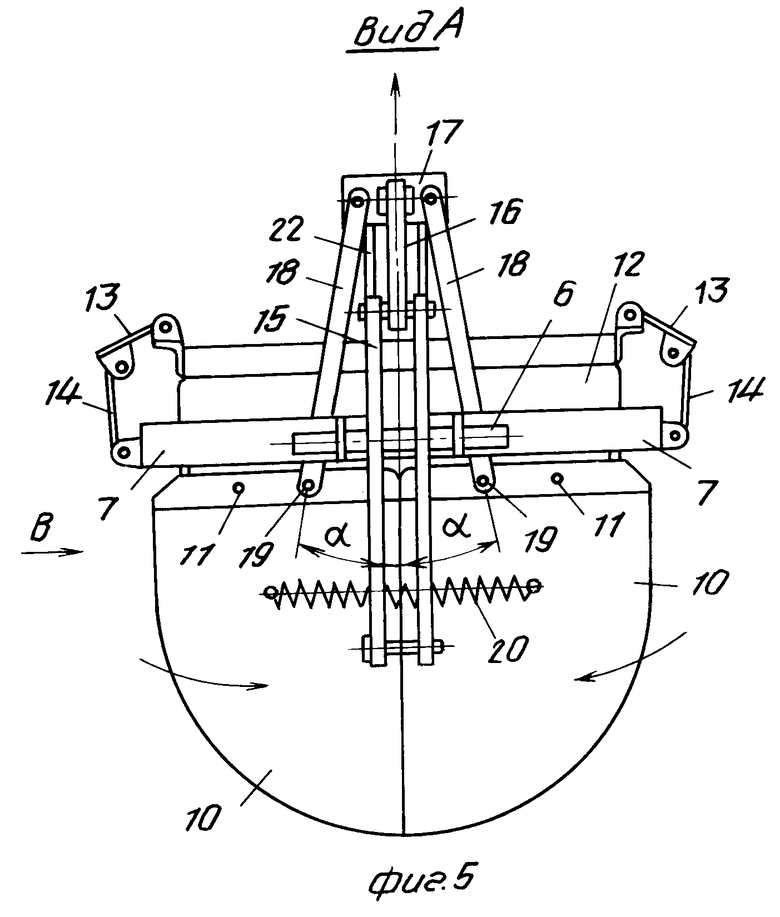
На фиг. 1 схематично показан мусоровоз, вид сбоку; на фиг. 2 - мусоровоз, вид сзади, с рабочим оборудованием при подборе грейферным захватом мусора на дороге и в транспортном положении; на фиг. 3 - вид по стрелке А на фиг. 2 (грейферный захват с раскрытыми челюстями); на фиг. 4 - вид по стрелке Б на фиг. 3; на фиг. 5 - вид по стрелке А на фиг. 2 (грейферный захват с закрытыми челюстями); на фиг. 6 - вид по стрелке В на фиг. 5.
Рабочее оборудование мусоровоза смонтировано на транспортном средстве 1, имеющем кузов 2 с установленной внутри разгрузочной плитой /не показана/ и верхним загрузочным окном в передней части. На кузове 2 сбоку смонтирован с возможностью поворота в горизонтальной плоскости загрузочный манипулятор, содержащий стрелу 3 с телескопической выдвижной секцией 4 и гидроцилиндром 5, обеспечивающим возможность поворота стрелы в вертикальной плоскости. На свободном конце стрелы 3 посредством шарнира 6 смонтирована рамка 7 с возможностью поворота гидроцилиндром 8 в вертикальной плоскости относительно стрелы 3. Рамка 7 снабжена грейферным захватом 9, который выполнен в виде двух челюстей 10, закрепленных посредством горизонтальных осей 11 с возможностью поворота в вертикальной плоскости на О-образном корпусе 12, который установлен с возможностью перемещения внутри рамки 7 и соединен с ней посредством шарнирно сочлененных рычагов 13 и 14.
Установленный на конце стрелы гидроцилиндр 8 соединен с одним из концов двуплечего рычага 15, смонтированного на шарнире 6 перпендикулярно плоскости поворота челюстей 10. Другой конец рычага 15 через промежуточную тягу 16 связан с пластиной 17, которая соединена с челюстями 10 при помощи распорных рычагов 18, шарнирно смонтированных под углом α к вертикальной оси грейферного захвата и симметрично друг другу /фиг. 5/. Распорные рычаги 18 прикреплены к челюстям 10 шарнирами 19, которые расположены между осями 11 крепления челюстей 10 к корпусу 12. Челюсти 10 соединены между собой пружиной 20 растяжения. На рамке 7 жестко закреплен ограничительный упор 21 поворота двуплечего рычага 15. Каждая пластина 17 жестко соединена со штоками 22, которые установлены с возможностью перемещения в отверстиях корпуса 12.
Загрузка мусора в кузов мусоровоза осуществляется следующим образом. Поворотом стрелы 3 и рамки 7 вниз грейферный захват 9 опускают на кучу мусора или загрязнений, находящихся на поверхности дороги. Поворот вниз рамки 7 относительно стрелы 3 производится втягиванием штока гидроцилиндра 8, при этом двуплечий рычаг 15 поворачивается вокруг шарнира 6 до контакта с ограничительным упором 21 и перемещает посредством тяги 16 пластины 17 на штоках 22 вниз. В результате распорные рычаги 18 раскрывают челюсти 10 грейферного захвата 9, растягивая пружину 20 /фиг. 3 и 4/. Ускоренное срабатывание гидроцилиндра 8 по сравнению с гидроцилиндром 5 поворота стрелы 3 в вертикальной плоскости обеспечивает раскрытие челюстей 10 до опускания грейферного захвата 9 на кучу мусора. Кромки челюстей 10 опираются на поверхность дороги.
Затем переключают гидроцилиндр 8 на выталкивание штока, что обеспечивает сначала закрытие челюстей 10 грейферного захвата 9, а затем поворот вверх рамки 7 с грейферным захватом, поскольку подъем вверх рамки 7 требует большего усилия, чем смыкание челюстей 10. Кроме того, закрытию челюстей 10 способствуют растянутые пружины 20. Для закрытия челюстей 10 двуплечий рычаг 15 поворачивается гидроцилиндром 8 вверх и через тягу 16 перемещает вверх пластины 17, которые распорными рычагами 18 поворачивают челюсти 10 навстречу друг другу, захватывая ими кучу мусора. В процессе закрытия челюстей 10 их кромки скользят по поверхности дороги, а положение рамки 7 остается горизонтальным, поэтому происходит плоскопараллельное перемещение вверх корпуса 12 на шарнирно сочлененных рычагах 13 и 14 вместе с челюстями 10 относительно рамки 7, компенсирующие изменение высоты шарниров относительно поверхности дороги.
Дальнейшее выталкивание штока гидроцилиндра 8 после поворота двуплечего рычага 15, контактирующего нижней частью с ограничительным упором 21, обеспечивает поворот вверх рамки 7 и одновременно с поворотом вверх стрелы 3 перемещение грейферного захвата 9 к верхнему загрузочному окну в передней части кузова 2 мусоровоза /фиг. 1 и 2/. При этом грейферный захват 9 с корпусом 12 опускается вниз относительно рамки 7 на шарнирно сочлененных рычагах 13 и 14. Разгрузка мусора в кузов 2 из грейферного захвата 9 производится переворотом последнего с высыпанием мусора под действием собственной тяжести через открытое верхнее окно грейферного захвата. При таком перевороте грейферный захват 9 вместе с корпусом 12 вновь перемещается на шарнирно сочлененных рычагах 13 и 14 в сторону рамки 7, в данном случае сверху вниз, ударяясь о верхнюю часть кузова 2 и обеспечивая тем самым дополнительное динамическое усилие, способствующее высыпанию мусора из грейферного захвата 9 в кузов. После высыпания мусора в кузов 2 грейферный захват 9 остается на крыше кузова, а стрела 3 - в вертикальном транспортном положении.
Преимущество изобретения состоит в том, что совмещенное управление операциями поворота грейферного захвата в вертикальной плоскости и раскрытия его челюстей при помощи одного гидроцилиндра упрощает систему управления, существенно снижает материалоемкость конструкции в результате исключения из нее дополнительного гидроцилиндра с трубопроводами и шлангами значительной длины для подвода к нему жидкости при использовании дополнительного двуплечего рычага, пластин и распорных рычагов, обладающих малой массой, а также повышает в целом эффективность и быстродействие рабочего оборудования мусоровоза при загрузке мусора в кузов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мусоровоз | 1987 |
|
SU1404418A1 |
| Мусоровоз | 1990 |
|
SU1736861A1 |
| МУСОРОВОЗ | 2008 |
|
RU2388677C1 |
| МУСОРОВОЗ | 2008 |
|
RU2381163C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И УДЕРЖАНИЯ КОНТЕЙНЕРА | 2014 |
|
RU2569631C1 |
| Мусоровоз | 1980 |
|
SU905152A1 |
| Мусоровоз | 1980 |
|
SU874500A1 |
| Мусоровоз | 1986 |
|
SU1331745A1 |
| Мусоровоз | 1980 |
|
SU905151A1 |
| Манипулятор | 1985 |
|
SU1271802A1 |
Использование: для сбора и перевозки твердых бытовых отходов. Сущность: рабочее оборудование содержит манипулятор, образованный шарнирно закрепленной на раме транспортного средства поворотной в вертикальной и горизонтальной плоскостях стрелой, рамкой 7, шарнирно закрепленной на свободном конце стрелы с возможностью поворота гидроцилиндром 8 в вертикальной плоскости относительно стрелы, и двухчелюстным грейферным захватом, челюсти 10 которого посредством горизонтальных осей закреплены с возможностью поворота в вертикальной плоскости на корпусе 12, который связан с рамкой 7. Плоскость поворота челюстей захвата перпендикулярна вертикальной плоскости поворота стрелы. На рамке 7 шарнирно закреплен двуплечий рычаг 15 с возможностью поворота в плоскости, перпендикулярной плоскости поворота челюстей 10. Тяга 16 одним концом связана с одним из плеч двуплечего рычага 15, а другим концом связана посредством пластины 17 с верхними концами распорных рычагов 18, которые расположены под углом к вертикальной оси грейферного захвата симметрично относительно друг друга и шарнирно соединены нижними концами с челюстями 10. Другое плечо рычага 15 связано с гидроцилиндром 8. 2 з.п.ф-лы, 6 ил.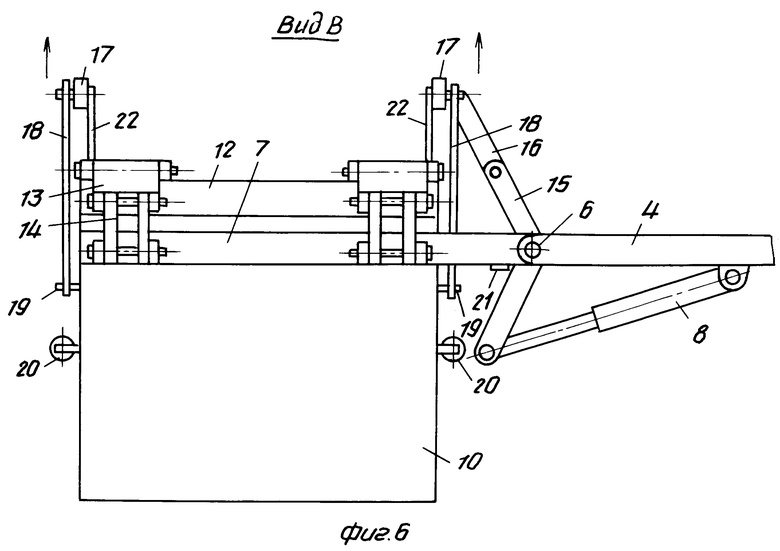
| Мусоровоз | 1990 |
|
SU1736861A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
