Изобретение относится к коммунальному машиностроению, в частности к мусоровозам, используемым в коммунальном хо- зя11стве для сбора и вывоза твердых отходов от домовладений к местам переработки.
Цель изобретения - расширение функ- ис нальных возможностей мусоровоза путем 1|Гчч печения согласованного поворота стрелы манипулятора и его захвата в горизонтальной плоскости относительно загруженного контейнера.
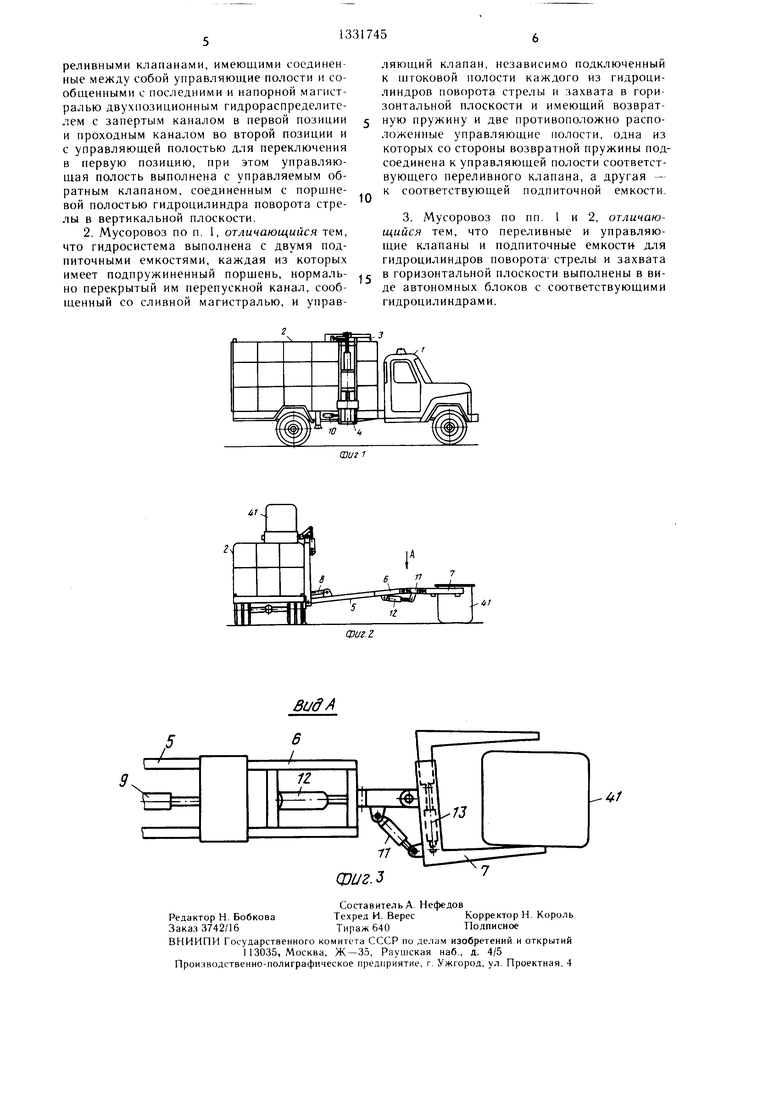
На фиг. 1 схематично изображен мусоровоз, вид сбоку в транспортном положении; на фиг. 2 - то же, вид сзади в ра- fiDiipM положении; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - гидравлическая ема управления манипулятором.
.V ycopOB03 содержит транспортное сред- L TBo 1, кузов 2 с верхним загрузочным окном 3 и шарнирно сочлененный манипулятор 4, который выполнен со стрелкой 5, снабженной телескопической секцией 6, захватом 7 и гидроцилиндрами 8-13, соответственно, для поворота стрелы в вертикальной плоскости, перемешения ее телескопической секции, поворота стрелы в горизонтальной плоскости, поворота захвата в горизонтальной и вертикальной плоскостях и фиксации губок захвата (фиг. 1-3). При этом гидроцилиндры 8-13 соединены с гидрораспределителями 14-19 соответственно (фиг. 4). Трехпозиционные гидрораспределители 14 -19 соединены с напорной магистралью 20 и сливной магистралью 21 гидросистемы.
Между поршневой и штоковой полостями каждого из гидроцилиндров 10 и 11 установлены управляемые переливные клапаны 22, управляющие полости которых соединены между собой и через дополнительный двухпозиционный гидрораспределитель 23 соединены с напорной магистралью гидросистемы. Гидрораспределитель 23 выполнен с проходным каналом в одной позиции и с запертым каналом в другой позиции. Управляющая полость 24 гидрораспределителя 23 для переключения его в позицию с запертым каналом соединена через управ ляемый обратный клапан 25 с поршневой полостью гидроцилиндра 8. Гидрораспределитель 23 оборудован устройством 2& для его фиксации в каждой из позиций.
К одной из полостей, например штоковой, каждого из гидроцилиндров 10 и 11 подключена через управляющий клапан 27 подпиточная емкость 28, снабженная подпружиненным поршнем 29 и перепускным каналом 30, нормально перекрытым этим поршнем и соединенным со сливной магистралью гидросистемы. Каждый управляющий клапан 27 снабжен возвратной пружиной 31 и двумя противоположно расположенными управляющими полостями 32 и 33. При этом управляющая полость 32, расположенная со стороны возвратной пружины 31, подключена
к управляющей полости управляемого переливного клапана 22, а управляющая полость 33 соединена с подпиточной емкостью 28 соответствующего гидроцилиндра 10
или 11.
Управляемые переливные клапаны 22, управляющие клапаны 27 и подпиточные емкости 28 выполнены в виде единых блоков 34 и 35 с соответствующими г идро,. цилиндрами 10 и 11.
Напорная магистраль 20 гидросистемы соединена с насосом 36, снабженным предохранительным клапаном 37, а сливная магистраль 21 через фильтр 38, оборудованный предохранительным клапаном 39, под5 ключена к масляному баку 40. Управляемый обратный клапан 25 включен в гидролинии управления гидроцилиндром 8 поворота стрелы в вертикальной плоскости. Описанные элементы образуют систему управления процессами разгрузки контейнеров 41
0 с мусором в кузов 2 мусоровоза.
Мусоровоз работает следующим образом.
Оператор, установив мусоровоз в такое
положение, чтобы контейнер 41, загруженный
мусором, находился в рабочей зоне действия
5 манипулятора 4, ручным включением трех- позиционных гидрораспределителей 14-18 приводит в действие гидроцилиндры 8-12 соответственно для поворота стрелы 5 в вертикальной плоскости, перемещения ее телескопической секции 6, поворота стрелы в го0 ризонтальной плоскости и поворота захвата 7 в 1-оризонтальной и вертикальной плоскостях. Благодаря этому манипулятор устанавливается против контейнера с мусором, расположенного на площадке. При этом не требуется точного симметричного расположе5 ния захвата относительно контейнера (фиг. 2 и 3). Затем оператор включает двухпозиционный гидрораспределитель 23, который фиксируется при помощи устройства 26 в позиции с проходным каналом, и рабочая жидкость поступает в управляющие полос ти управляемых переливных клапанов 22, тем самым обеспечивая соединение порц невой и штоковой полостей каждого из гидроцилиндров 10 и 11. Одновременно рабочая жидкость поступает в управляющие пое лости 32 управляющих клапанов 27, открывая их и обеспечивая за счет этого соединение соответствующих полостей каждого из гидроцилиидров 10 и 11 с подпиточной емкостью 28. Далее захватывание конвейера 41 с мусором осуществляется вы0 движением телескопической секции 6 манипулятора посредством гидроцилиндра 9 и фиксацией губок захвата 7 при помощи гидроцилиндра 13. При этом вследствие взаимодействия внутренних поверхностей губок захвата с боковыми стенками контейнера воз5 никают реактивные усилия на штоках гидроцилиндров 10 и 11, вследствие чего стрела 5 манипулятора и его захват 7 свободно поворачиваются в горизонтальной
плоскости относительно неподвижно1Ч) контейнера таким образом, что боковые стенки носледнего оказываются расположенными параллельно внутренним сторонам губкам захвата.
В зависимости от направления этих поворотов вследствие несимметричности внутренних объемов нор1нней и 1нтоковой полостей гидроцилнндров 10 и 11 появляется либо избЬ)1ток, ;1ибо недостаток рабочей жидкости в полостях этих гидроцилиндров, в первом случае избыточная рабочая жидкость поступает через управляю ций клапан 27 в подпиточную емкость 28, сдвигает Г1орн1епь 29 и через перепускной канал 30 поступает в сливную магистраль 21. Во втором случае давление в нолостях соответствующего гидропилиндра 10 или 11 и подни- точной емкости 28 уменьшается и порн1ень 29 под .действием своей пружины перемещается вверх, обеспечивая поступление рабочей жидкости из подпиточной емкости 28 через управляющую полость 32 в полости соответствующего гидроцилиндра 10 или 11 Подъем контейнера 41 с мусором к загрузочному бункеру 3 осуществляется путем ручного включения трехпозиционных гид- рораснределите.чей 14-16, приводящих в действие гидроцилиндры 8-10. При включении гидрораспределителя 14 в позицию, обеспечивающую подачу рабочей жидкости в поршневую полость гидроцилиндра 8 для подъема
стрелы
рабочая жидкость одновременно посту |ает в управляющую полость 24 двухпозиционного гидрораспределителя 23 и переключает его в позицию с запертым каналом. При этом управляемые переливные клапаны 22 под действием своих пружин закрываются, а управляющие клапаны 27 в зависимосги от объема рабочей жидкости в подпиточных емкостях 28 работают в одном из следующих режимов. Если в процессе захватывания контейнера 41 с мусором нри автоматическом согласовании поворотов в горизонтальной плоскости стрелы манипулятора и его захвата в соответствующем гидроцилиндре 10 или 11 имеется избыток рабочей жидкости, то нодпиточная емкость 28 находится в нормальном заряженном состоянии с внугренним давлением, равным подпорному давлению в сливной магистрали 21 и достаточным для преодоления усилия пружины 31 и закрытия управляющего кла- пана 27 при помощи его управляюц;ей полости 33, соединенной с подпиточной емкостью 28. Если в процессе захватывания контейнера 41 с мусором при автоматическом согласовании поворотов в горизонтальной нлоскости стрелы манипулятора и его захвата в соответствующем гидроцилиндре 10 или 1 имеется недостаток рабочей жидкости, то нодпиточная емкость 28 находится в незаряженном состоянии и давление в упрар.чяющей полости 33 управляющего клапана 27 недостаточно для преодо.к ния усилия, создаваемого пружишш 31, а управляющий клапан 27 остается в открытом состоянии.
В процессе выполнения технологических
операций перемещения контейнера 41 с мусором к загрузочному окну 3 при первом включении гидроцилиндра 10 или 11 рабочая жидкоспь из нтоковых полостей этих, гидроцилиндров поступает через управляк)П1ий клапан 27 в подпиточную емкость 28 и перемещает вниз порщепь 29. Зарядка подпиточной емкости 28 продолжается до тех пор, пока давление в ней не уравняется с подпорным давлением в сливной магистрали 21, достаточным для преодоления уси5 ЛИЯ пружины 31 и закрытия управляющего клапана 32 при помощи его управляющей полости 33.
Горизонтальное положение захвата 7 в процессе подъема контейнера с мусором поддерживается путем ручного включения гид0 рораспределителя 18, приводящего в действие гидроцилиндр 12 поворота захвата в вертикальной плоскости. После установки контейнера с мусором в исходном для выгрузки положении оператор ориентирует его
c параллельно стенке кузова 2 путем ручного включения гидрораспределителя 17, приводящего в действие гидроцилиндр 11 поворота захвата 7 в горизонтальной плоскости. Затем ручным включением гидрораспределителя 18 в позицию для поворота захва0 та вверх мусор выгружается из контейнера через загрузочное окно в кузов.
Возврат и установка порожнего контейнера на площадку осуществляется обычным образом путем ручного включения гидрораспределителей 14-16 и 18, приводящих
5 в действие соответственно гидроцилиндры 8-10 и 12, после чего гидроцилиндр 13 освобождает контейнер 41 от захвата 7.
Формула изобретения
01. Мусоровоз, содержащий смонтированный на транспортном средстве кузов с загрузочным отверстием в его крыщке и манипулятор с гидроцилиидрами соответственно для поворота стрелы в вертикальной плоскости, перемещения ее телескопической секции, поворота стрелы в горизонтальной плоскости, поворота захвата в горизонтальной и вертикальной плоскостях и фиксации губок захвата соединенными посредством трехпозиционных гидрораспределителей с напор0 ной и сливной магистралями гидросистемы, отличающийся тем, что, с целью расширения функциональных возможностей мусоровоза путем обеспечения согласованного поворота стрелы манипулятора и его захвата в горизонтальной плоскости относитель5 но загруженного контейнера, гидросистема снабжена подключенными к полостям гидроцилиндров новорота стре,пы и захвата в горизонтальной плоскости управляемыми переливными клапанами, имеющими соединенные между собой управляющие полости и сообщенными с последними и напорной магистралью двухпозиционным гидрораспределителем с запертым каналом в первой позиции и проходным каналом во второй позиции и с управляющей полостью для переключения в первую позицию, при этом управляющая полость выполнена с управляемым обратным клапаном, соединенным с порщне- вой полостью гидроцилиндра поворота стрелы в вертикальной плоскости.
2. Мусоровоз по п. 1, отличающийся тем, что гидросистема выполнена с двумя под- питочными емкостями, каждая из которых имеет подпружиненный порщень, нормально перекрытый им перепускной канал, сообщенный со сливной магистралью, и управ0
5
ляющии клапан, независимо подключенный к щтоковой полости каждого из гидроцилиндров поворота стрелы и захвата в горизонтальной плоскости и имеющий возвратную пружину и две противоположно расположенные управляющие полости, одна из которых со стороны возвратной пружины подсоединена к управляющей полости соответствующего переливного клапана, а другая - к соответствующей подпиточной емкости.
3. Мусоровоз по пп. 1 и 2, отличающийся тем, что переливные и управляющие клапаны и подпиточные емкости для гидроцилиндров поворота- стрелы и захвата в горизонтальной плоскости выполнены в виде автономных блоков с соответствующими гидроцилиндрами.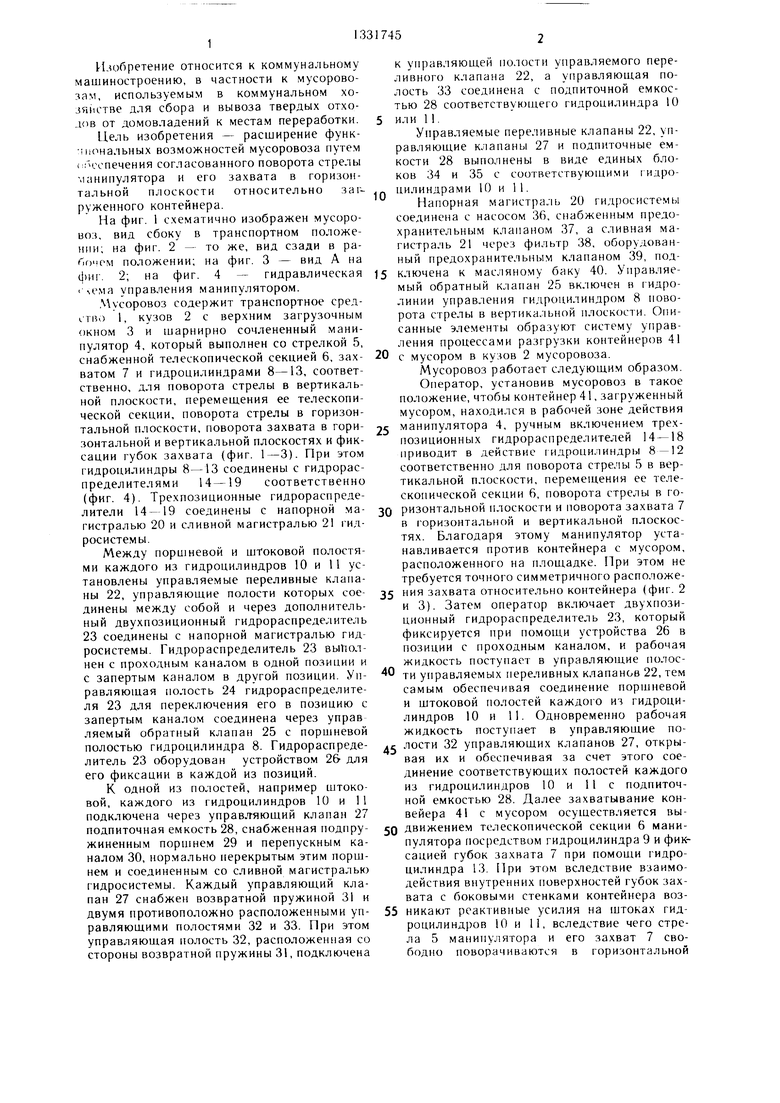

| название | год | авторы | номер документа |
|---|---|---|---|
| Мусоровоз | 1986 |
|
SU1359221A1 |
| Устройство для загрузки мусоровозов | 1986 |
|
SU1337321A1 |
| Устройство для разгрузки контейнеров в кузов мусоровоза | 1986 |
|
SU1381038A1 |
| Загрузочное устройство мусоровоза | 1985 |
|
SU1323471A1 |
| Мусоровоз | 1982 |
|
SU1071534A1 |
| Мусоровоз | 1988 |
|
SU1703580A1 |
| Мусоровоз | 1985 |
|
SU1351842A1 |
| Мусоровоз | 1985 |
|
SU1247316A1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| МУСОРОВОЗ КУЗОВНОЙ ЗАКРЫТОГО ТИПА | 2004 |
|
RU2278067C1 |
Изобретение относится к коммунальному машиностроению. Цель изобретения - расширение функциональных возможностей мусоровоза. Мусоровоз содержит транспортное средство с кузовом и манипулятором с гидроцилиндрами 8-13 соответственно для поворота стрелы в вертикальной плоскости, перемещения ее телескопической секции, поворота стрелы в горизонтальной плоскости, поворота захвата в горизонтальной и вертикальной плоскостях и фиксации губок захвата. Для согласованного поворота стрелы и его захвата в горизонтальной плоскости относительно загруженного контейнера включается двухпозиционный гидрораспределитель 23 с фиксацией в позиции с проходным каналом. При этом переливные клапаны 22 обеспечивают соединение поршневой и штоковой полостей гидроцилиндров 10 и 11, а управляющие клапаны 27 - соединение соответствующих полостей каждого из гидроцилиндров 10 и 11 с подпиточной емкостью 28. При проектировании губок захвата со стенками контейнера появляется либо избыток, либо недостаток рабочей жидкости в полостях гидроцилиндров 10 и 11. В первом случае жесткость поступает через клапан 27 в емкость 28, сдвигая поршень 29, и через перепускной канал 30 поступает в сливную магистраль. Во втором случае поршень 29 под действием своей пружины перемещается вверх для поступления рабочей жидкости в полости соответствующего гидроцилиндра 10 и 11.2 з.п. ф-лы, 4 ил. (Л Л со СА5 О1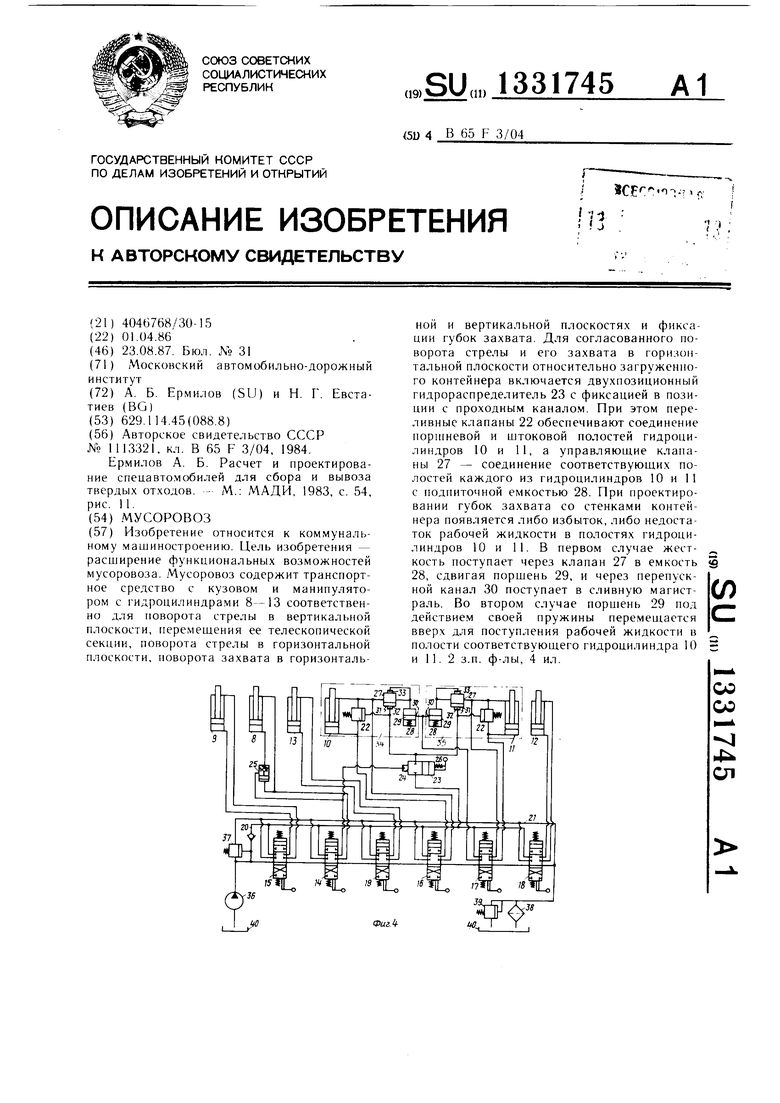
й1
ВидА
фиг.з
Редактор Н. Бобкова Заказ 3742/16
Составитель А Нефедов
Техред И. ВересКорректор Н. Король
Тираж 640Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
l 13035, Москва, , Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Мусоровоз | 1983 |
|
SU1113321A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Ермилов А | |||
| Б | |||
| Расчет и проектирование спецавто.мобилей для сбора и вывоза твердых отходов | |||
| - М.: МАДИ, 1983, с | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
