(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОВЫМ ПОЛОЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА
Изобретение относится к системам автолштического регулирования, в частности к автопилотам.
Известны системы автоматического управления, содержащие датчик угла, задатчик угла и сервопривод, в которых для управления угловым положением летательно го аппарата применяется электромеханическое интегрирующее устройство, характеризуются громоздкостью, сложностью и малой надежностью схемы.
Предлагаемая система отличается от известных тем, что она содержит устройство формирования команды управления, выполнено из двух параллельно включенных изодромного и инерционного с форсированием звеньев, подсоединенных ко входам суммирующег усилителя, выход которого подключен к серВО1ФИВОДУ, а входы изодромного и инерцнонного звеньев подсоединены к датчику и задатчику углового положения соответственно.
Это позволяет повысить надежность, yJ ростить систему и снизить вес системы управления.
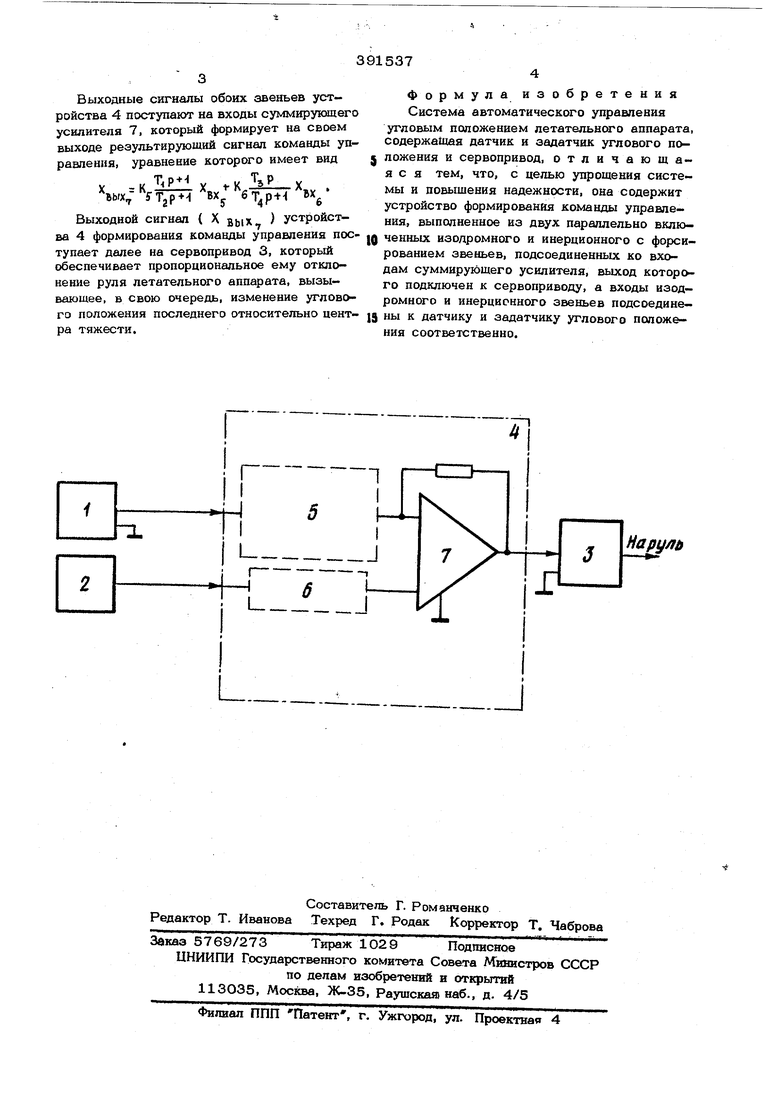
На чертеже представлена принципиальна схема предлагаемой системы управления.
Система содержит задатчик 1 угла, цвт чик 2 текущего значения угла, сервопривод 3, устройство 4 формирования команды управления, инерционное звено 5 с форсированием, изодромное звено 6, суммирующий усилитель 7.
Работа системы управления основана на следующих принципах.
При поступлении релейного сигнала управляющего воздействия с задатчика 1 на вход звена 5 устройства 4 выходной сигнал звена 5 имеет вид
Т,р-И
к X
Одновременно с датчика 2 на вход звена 6 поступает сигнал, пропорциональны текущему угловому положению летательного аппарата.
В соответствии с передаточной функцией звена 6 его выходной сигнал имеет вид
з.
w
ьх
Г,Р6
D Выходные сигналы обоих звеньев устройства 4 поступают на входы суммирующего усилителя 7, который формирует на своем выходе результирующий сигнал команды управления, уравнение которого имеет вид Т р X BxJ 6J вх ъых У TjpH Выходной сигнал ( X вых, ) устройстi., «и.7 ва 4 формирования команды управления пос- jg тупает далее на сервопривод 3, который обеспечивает пропорциональное ему отклонение руля летательного аппарата, вызываюшее, в свою очередь, изменение углового положения последнего относительно цент- (5 ра тяжести, J Формула изобретения Система автоматического управления угловым положением летательного аппарата, содержаи1ая датчик и задатчик углового положения и сервопривод, отличающаяся тем, что, с целью упрощения системы и повышения надежности, она содержит устройство формирования команды управле выполненное из двух параллельно включенных изодромного и инерционного с форсированием звеньев, подсоединенных ко вход м суммирующего усилителя, выход которор подключен к сервоприводу, а входы изодромного и инерционного звеньев подсоединены к датчику и задатчику углового положения соответственно.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2262730C1 |
| АДАПТИВНЫЙ АВТОПИЛОТ УГЛА КРЕНА | 2004 |
|
RU2272747C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289839C1 |
| СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1995 |
|
RU2129971C1 |
| СПОСОБ УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289838C1 |
| ПОМЕХОУСТОЙЧИВАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2737872C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ БОРТОВЫХ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2473107C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПРОДОЛЬНО-БАЛАНСИРОВОЧНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2394263C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
L....
Hapy/tff
