Изобретение относится к электроприводу и может использоваться в станкостроении и робототехнике.
Известен способ, в котором управление соотношением скоростей достигается за счет измерения напряжений, пропорциональных углам поворота электродвигателей, и их фазового сравнения, а скорость вращения двигателей должна быть кратной периодам сигнала, формируемого функциональным преобразователем [1].
Отсутствие контроля за изменением параметров регуляторов электрических машин, за изменением скорости на заданном промежутке движения и функциональным измененем скорости снижает точность. Так, напримеp, изменение скорости ведущего привода приводит к изменению скорости ведомого в заданном соотношении, которое может отличаться от заданного, что может быть вызвано изменением питающих напряжений или изменением коэффициента усиления прямого тракта и т.д.
Известен способ, в котором используются две системы автоматического регулирования: одна цифровая, вторая аналоговая. Каждая из них имеет датчик и они установлены на одном валу. С помощью счетчиков и устройств сравнения анализируется отклонение от заданного значения скорости и через устройство преобразования, после сравнения сигналов с тахогенератора и обработанного с цифрового датчика скорости, вырабатывается сигнал коррекции, который подается на вход ведомого привода [2].
Недостатки способа заключаются в предварительном запуске с целью достижения заданных в цифровой САР величин скоростей; наличии двух датчиков и двух задатчиков напряжения: отсутствии контроля за значением скорости ведомого привода; возможности регулирования скорости только двух электрических машин.
Цель изобретения - повышение точности регулирования положения и скорости взаимосвязанных приводов.
Поставленная цель достигается тем, что на вход ведущего привода задают закон изменения скорости движения исполнительного механизма, измеряют действительное положение исполнительного механизма ведущего привода, вычисляют по функциональной зависимости Y=Кх значение сигнала положения исполнительного механизма ведомого привода и подают вычисленное значение сигнала положения на вход регулятора положения ведомого привода, измеряют текущее значение сигнала скорости U1 исполнительного механизма ведущего привода и вычисляют значение скорости U2=U1˙К исполнительного механизма ведомого привода и разность значения сигналов скоростей исполнительных механизмов ведущего и ведомого приводов, полученную разность сигналов скоростей подают на вход регулятора скорости ведомого привода, формирующего указанное управляющее воздействие на силовой преобразователь, где х - входной сигнал датчика положения ведущего привода, К - заданный коэффициент.
Отличительные особенности и новизна предлагаемого способа заключаются в реализации функционального взаимодействия между ведомой и ведущей координатами, причем каждый предыдущий привод становится ведущим для каждого последующего. Наличие регулятора положения и устройства расчета положения обеспечивает движение во взаимосвязи по траекториям в пространстве координат со стабилизацией скорости относительно ведущей координаты. Обеспечивается расчет скорости и ее коррекция в каждый момент времени во всех точках траектории движения относительно ведущей координаты.
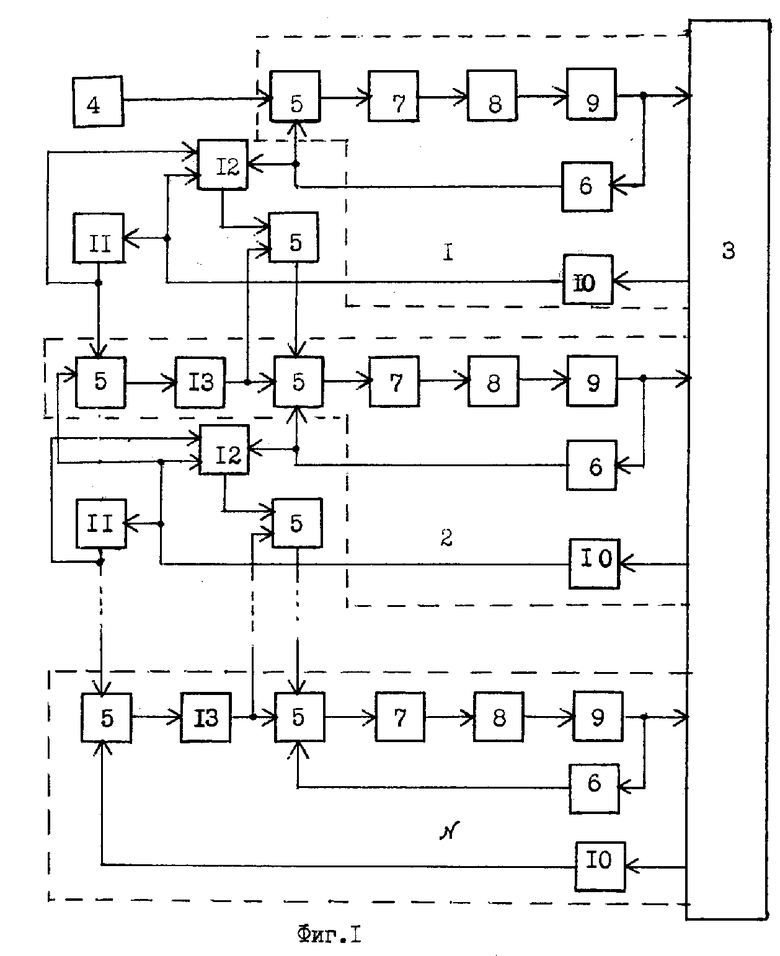
На фиг.1 и 2 изображено устройство, реализующее предлагаемый способ.
Устройство состоит из N приводов. Первый привод 1 представлен схемой регулятора скорости, остальные 2,...,N - следящие по положению приводы. Все приводы связаны с исполнительными механизмами объекта 3, в качестве которого могут выступать многокоординатный станок, робот-манипулятор, прокатный стан, копировальный станок и т.д. Первый привод состоит из первого сумматора 5, первого регулятора 7 скорости, первого силового преобразователя 8, первого двигателя 9 с встроенным или пристроенным тахогенератором 6. Приводы 2, ...,N соответственно состоят из последовательно включенных вторых сумматоров 5, регулятора 13 положения, третьих сумматоров 5, вторых регуляторов 7 скорости, силовых преобразователей 8, двигателей 9 и тахогенераторов 6. Связь между приводами осуществляется с использованием блока 11 вычисления положения, блока 13 вычисления скорости и четвертого сумматора 5. Каждый из приводов оснащен датчиком 10 положения соответственно.
Взаимосвязанное движение исполнительных механизмов в представленной схеме осуществляется следующим образом.
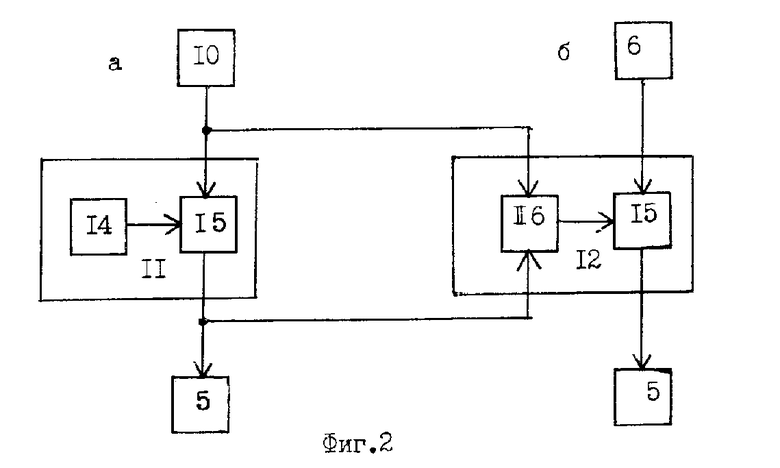
В исходном состоянии на всех входах приводов сигнал управления отсутствует и связанные с ними исполнительные механизмы объекта 3 неподвижны. На вход первого привода 1 с задатчика 4 подается сигнал задания скорости, который может изменяться во времени по любому закону. В качестве задатчика скорости может использоваться любой функциональный генератор. Сигнал с задатчика 4 поступает на вход сумматора 5, на второй вход которого подается сигнал с тахогенератора 6. Полученная разность сигналов подается на регулятор скорости 7, а с него на силовой пpеобразователь 8, выход которого подключен к двигателю 9. Двигатель начинает отрабатывать воздействие и исполнительный механизм соответствующей координаты объекта управления приводится в движение. При этом начинает вращаться датчик положения, механически связанный с исполнительным механизмом. Сигнал с датчика 10 положения подается на вход блока 11 вычисления положения и на первый вход блока 12 вычисления скорости, на второй вход блока вычисления скорости подается с тахогенератора 6, а на третий - с выхода блока 11 вычисления положения. Выход блока 12 вычисления скорости соединен с первым входом четвертого сумматора 5. Связь между приводами осуществляется по линейному закону и на вход привода 2 подается сигнал, вычисленный по формуле Y=Кх, а реализация этого блока представлена на фиг.2а. Блок вычисления положения содержит блок 14 уставки коэффициента и первого блока 15 перемножения. В блоке перемножения вычисляется произведение текущего значения с датчика положения первой координаты и постоянного значения, величина которого определяет тангенс угла наклона воспроизводимого движения. Выход блока вычисления положения связан с регулятором 13 положения через второй сумматор 5. На второй вход второго сумматора 5 подается сигнал с второго датчика 10 положения этой же координаты и одновременно сигнал с датчика положения поступает на второй блок 11 вычисления положения. Полученная разность сигналов с второго сумматора 5 поступает на вход регулятора положения, а с его выхода сигнал поступает на второй вход четвертого сумматора 5 и на вход третьего сумматора 5. В блоке 12 вычисляется значение соотношения скоростей по следующему соотношению:
U2=U1˙K , , где К=tgarctgy/х или К=y/х. Блок вычисления скорости ведомой координаты реализуется по схеме, представленной на рис.2б, и состоит из делителя 16 и второго блока 15 умножения. В блоке деления определяется соотношение координат, получаемых с датчика положения ведущей координаты и вычисленного положения в блоке 11. Полученное частное умножается на значение текущей скорости первой (ведущей) координаты.
В четвертом сумматоре 5 вычисляется разность скоростей с регулятора 13 положения и вычисленного значения скорости в блоке 12 вычисления скорости. Полученная разность сигналов в виде корректирующего сигнала поступает на вход третьего сумматора 5, на третий вход которого поступает сигнал с датчика скорости этой же координаты и далее на вход второго регулятора 7 скорости, а затем через второй силовой преобразователь 8 на второй двигатель 9, приводя в движение исполнительный механизм второй координаты объекта 3.
Аналогично работают следующие координаты. Окончание процесса управления обеспечивается отключением задатчика по истечении, например, заданного интервала времени, который формируется в самом задатчике.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДАМИ ПОДАЧ ДВУХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ РАВНОЗНАЧНЫХ ВЕДУЩИХ КООРДИНАТ ЗУБОДОЛБЕЖНОГО СТАНКА | 1991 |
|
RU2025257C1 |
| Следящий привод | 1977 |
|
SU857924A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
| Регулятор давления жидкости | 1988 |
|
SU1536359A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления электроприводом промышленного робота | 1985 |
|
SU1265691A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Система поддержания заданного соотношения скоростей | 1983 |
|
SU1136291A1 |
Использование: в электроприводах станкостроения и робототехники. Сущность изобретения заключается в том, что обеспечивается повышение точности управления взаимосвязанными приводами. Задают закон изменения скорости движения исполнительного механизма, измеряют действительное положение и текущую скорость ведущего привода на основе функциональной зависимости между ведомо и ведущей координатами объекта управления, рассчитывают текущее положение ведомой координаты и сигнал управления подают на вход регулятора положения, рассчитывают текущее значение скорости ведомой координаты, вычисляют соотношение скоростей ведущей и ведомой координат и сигнал разности скоростей, полученную разность подают на вход регулятора скорости ведомой координаты. 2 ил.
СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ВЗАИМОСВЯЗАННЫХ ПРИВОДОВ, при котором измеряют напряжение, пропорциональные углам поворота валов исполнительных двигателей, и формируют управляющее воздействие на силовой преобразователь ведомого двигателя, отличающийся тем, что, с целью повышения точности, на вход ведущего привода задают закон изменения скорости движения исполнительного механизма, измеряют действительное положение исполнительного механизма ведущего привода, вычисляют по функциональной зависимости Y=Kx значение сигнала положения исполнительного механизма ведомого привода и подают вычисленное значение сигнала положения на вход регулятора положения ведомого привода, измеряют текущее значение сигнала скорости U1 исполнительного механизма ведущего привода и вычисляют значение скорости U2=U1 · K исполнительного механизма ведомого привода и разность значения сигналов скоростей исполнительных механизмов ведущего и ведомого приводов, полученную разность сигналов скоростей подают на вход регулятора скорости ведомого привода, формирующего указанное управляющее воздействие на силовой преобразователь, где x - входной сигнал датчика положения ведущего привода, K - заданный коэффициент.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ШЛИЦЕВОЕ СОЕДИНЕНИЕ | 0 |
|
SU238294A1 |
