Изобретение относится к устройствам для подъема грузов на ограниченную высоту, применяемым на станциях обслуживания автомобилей, складах, пунктах перегрузки штучных грузов и т.п.
Известны устройства с горизонтальным подъемным столом, опирающимся на рычажный механизм типа ножниц. Эти устройства имеют винтовой, гидравлический или канатный привод. В подъемниках, обеспечивающих достаточно большую высоту подъема, наиболее удобно использовать канатный привод, он легче, технологичнее и дешевле.
Недостатком подъемников с канатным приводом является сложность выведения рычажной системы из нижнего, близкого к "мертвому", положения. Это затрудняет создание подъемников с малой высотой стола в нижнем положении, так как не позволяет приближать рычаги к горизонтальному состоянию или требует установки вертикальной рамы с высотой, превышающей высоту подъема стола, что существенно увеличивает вес сооружения. В то же время уменьшение минимальной высоты подъемного стола является весьма актуальной задачей, особенно для подъемников, предназначенных для обслуживания автомобилей.
Для решения этой задачи применяются различные приемы. Известен подъемник, состоящий из ножничного механизма, несущего платформу. Управление механизмом осуществляется канатно-полиспастной системой, которой конец каната закрепляется на ползуне, перемещающемся по одному из рычагов и имеющем ролик, взаимодействующий со специальной криволинейной направляющей, закрепленной на другом рычаге. Канат огибает блок, расположенный на том же рычаге, что и ползун, и идет на механизм подъема. Таким образом, при натяжении каната он перемещает ползун, который своим роликом расклинивает два рычага, расположенные под малым углом друг к другу, и способствует выходу механизма из положения, близкого к "мертвому".
Рассмотренная система решает поставленную задачу, однако имеет следующие недостатки. Она не дает возможности складывать механизм до полностью горизонтального положения рычагов и требует некоторый начальный угол между ними, отличный от нуля. Другим недостатком является усложнение и, следовательно, снижение надежности и КПД системы из-за ведения ползуна и расклинивающего ролика.
Известен подъемник, содержащий основание, подъемный стол, механизм вертикального перемещения последнего, включающий в себя перекрещивающиеся в виде ножниц рычаги, лебедку и канатную систему, образующую по крайней мере однократный полиспаст, связанный с нижним концом одного из рычагов ножниц, и отклоняющий блок.
В этом подъемнике канат, огибая блоки на рычагах, образует полиспаст, стягивающий концы ножниц, и приходит на лебедку. Еще один отклоняющий блок закреплен на центральном шарнире ножниц. Подъемная сила, обеспечивающая выход механизма из "мертвого" положения, создается за счет опирания центрального отклоняющего блока на канат, когда стол находится в нижнем положении. После того, как стол приподнимается на некоторую высоту, эта сила исчезает и подъем осуществляется за счет усилия полиспаста, стягивающего рычаги.
Достоинством этого решения является возможность сложить рычаги до горизонтального состояния и соответственно обеспечить минимальную высоту стола в нижнем положении.
Однако данное устройство, принципиально решая проблему, требует приложения очень больших усилий для вывода стола из нижнего положения, так как дополнительное усилие на центральном отклоняющем блоке действует на очень малом участке хода стола. Кроме того, малый угол огибания канатом центрального блока приводит к тому, что вертикальная составляющая усилия на этом блоке весьма мала по сравнению с усилием в канате. Таким образом, рассмотренное устройство принципиально работоспособно, но малоэффективно.
Задачей изобретения является обеспечение минимальной высоты подъемного стола в нижнем положении, снижение усилий в приводе и элементы механизма, а следовательно, повышение надежности и экономичности.
Эта задача решается путем установки на основании стойки, с которой соединена одна из ветвей полиспаста, а отклоняющий блок закреплен на столе с возможностью контактирования с упомянутой ветвью при расположении стола ниже места соединения этой ветви со стойкой. Канат, перегибаясь на отклоняющем блоке, создает подъемное усилие, выводящее механизм из "мертвого" положения. При этом высота места соединения каната со стойкой выбирается из условия ограничения максимального усилия в канате при подъеме стола.
Это решение не усложняет конструкцию механизма, обеспечивает минимальную высоту стола в нижней позиции, так как позволяет опустить рычаги ножниц до горизонтального положения, и ограничивает усилие в канате. При этом высота стойки может быть значительно меньше, чем максимальная высота подъема стола.
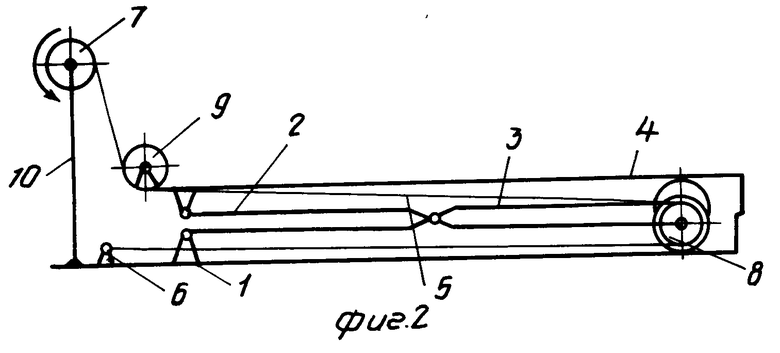
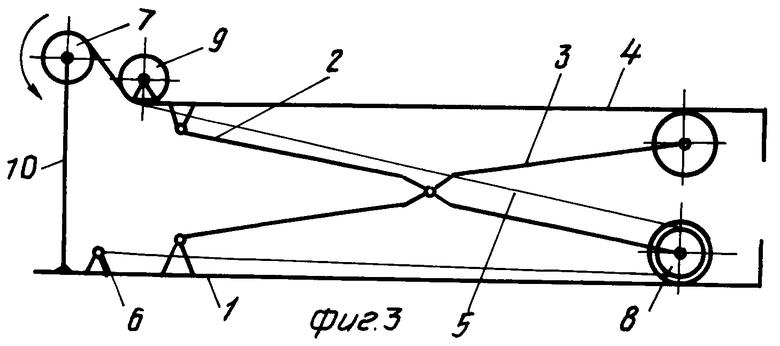
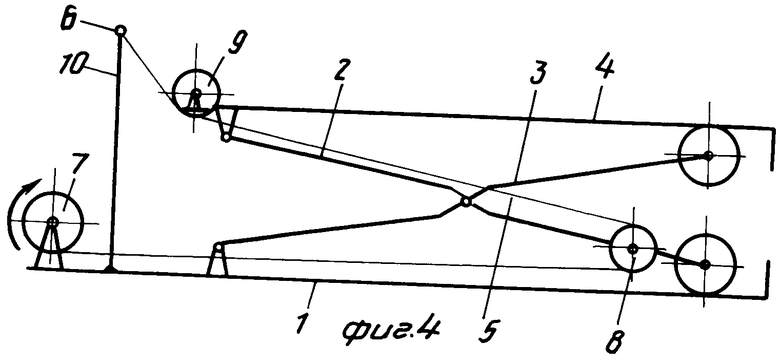
На фиг. 1 показана схема подъемника; на фиг.2, 3 - то же, на разных стадиях подъема стола; на фиг.4 - вариант запасовки каната.
Подъемник содержит основание 1, на котором размещаются скрещенные рычаги 2, 3, образующие "ножницы", соединенные с подъемным столом 4. Канат 5, один из концов которого закреплен на основании в точке 6, а другой связан с лебедкой 7, проходит через блок 8, закрепленный на рычаге 2, образуя полиспаст, взаимодействующий с нижним концом одного из рычагов ножниц. На столе 4 закреплен отклоняющий блок 9, причем он размещен таким образом, что при нижних положениях стола находится в контакте с ветвью каната 5, соединенной со стойкой 10 основания. В зависимости от схемы запасовки каната и конструктивных особенностей подъемника на стойке 10 может быть размещена лебедка 7 (фиг. 2, 4) или точка 6 закрепления конца каната 5 (фиг.3), или блок 9 (фиг.1).
Работает подъемник следующим образом.
В исходном состоянии стол 4 подъемника находится в нижнем положении (фиг. 2), канат 5 огибает блоки 8 и 9. При включении лебедки 7 канат 5 натягивается и создает вертикальную составляющую усилия на блоке 9, которая обеспечивает выход рычажной системы из горизонтального положения. По мере подъема стола (фиг.3) возрастает подъемная сила от горизонтальной составляющей усилия, создаваемого канатами на блоке 8. При подъеме стола 4 на высоту соединения каната 5 со стойкой 10 блок 9 выходит из контакта с канатом 5 (фиг. 1). Дальнейший подъем происходит за счет стягивания канатной системой нижних концов рычагов 2 и 3.
Опускание стола происходит в обратной последовательности. При этом на соответствующей высоте блок 9 входит в контакт с натянутой между блоком 8 и лебедкой 7 ветвью каната 5 и обеспечивает плавное опускание стола 4.
Из приведенного описания видно, что конструкция подъемника достаточно проста и надежна. Малая высота стойки обеспечивает снижение собственного веса. При рациональном проектировании усилие в канате не превышает веса поднимаемого груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъема или перемещения тела с сохранением его изначального положения относительно горизонта или заданной поверхности | 2023 |
|
RU2814695C1 |
| ПОДЪЕМНИК | 2011 |
|
RU2463242C1 |
| Строительный подъемник | 1981 |
|
SU977350A1 |
| Канатный строительный подъемник для длинномерных грузов | 1981 |
|
SU1002222A1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2393986C2 |
| Грузоподъёмный механизм (варианты) | 2023 |
|
RU2809870C1 |
| Подъемник | 1986 |
|
SU1472625A1 |
| Канатный строительный подъемник для длинномерных грузов | 1983 |
|
SU1127833A1 |
| Грузоподъемное устройство | 1985 |
|
SU1355604A1 |
| Способ экспериментального определения жесткости канатного подвеса для кранов мостового типа | 2022 |
|
RU2803775C1 |
Использование: подъем грузов, например автомобилей при обслуживании. Сущность изобретения: устройство содержит основание 1 со стойкой 10, стол 4, установленный на рычажной системе 2, 3 типа ножниц, и канатную систему с блоками 8 и 9 и лебедкой 7. Блок 9 размещен на столе 4 таким образом, что на начальной стадии подъема он находится в контакте с ветвью каната 5, взаимодействующей со стойкой 10, чем обеспечивает выход рычажной системы 2, 3 из горизонтального состояния. 4 ил.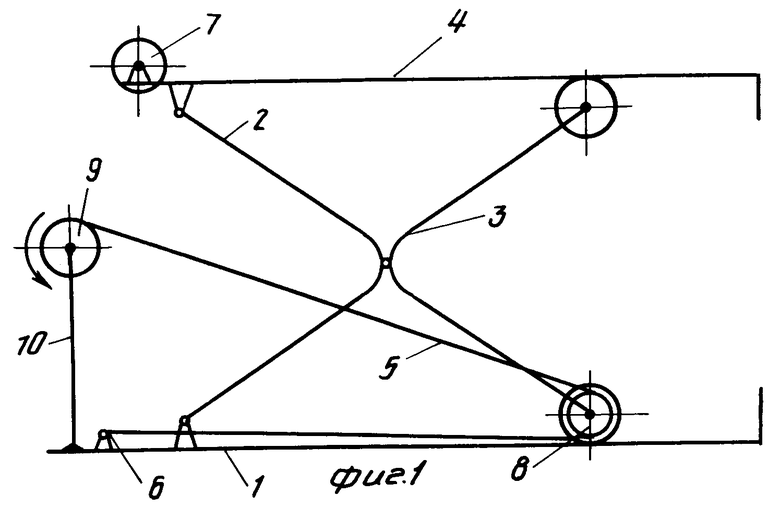
ПОДЪЕМНИК, содержащий основание, подъемный стол и механизм вертикального перемещения последнего, включающий в себя перекрещивающиеся в виде ножниц рычаги, лебедку и канатную систему, образующую по крайней мере однократный полиспаст, связанный с нижним концом одного из рычагов ножниц, и отклоняющий блок, отличающийся тем, что на основании установлена стойка, с которой соединена одна из ветвей полиспаста, а отклоняющий блок закреплен на столе с возможностью контактирования с упомянутой ветвью при расположении стола ниже места соединения этой ветви со стойкой.
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
