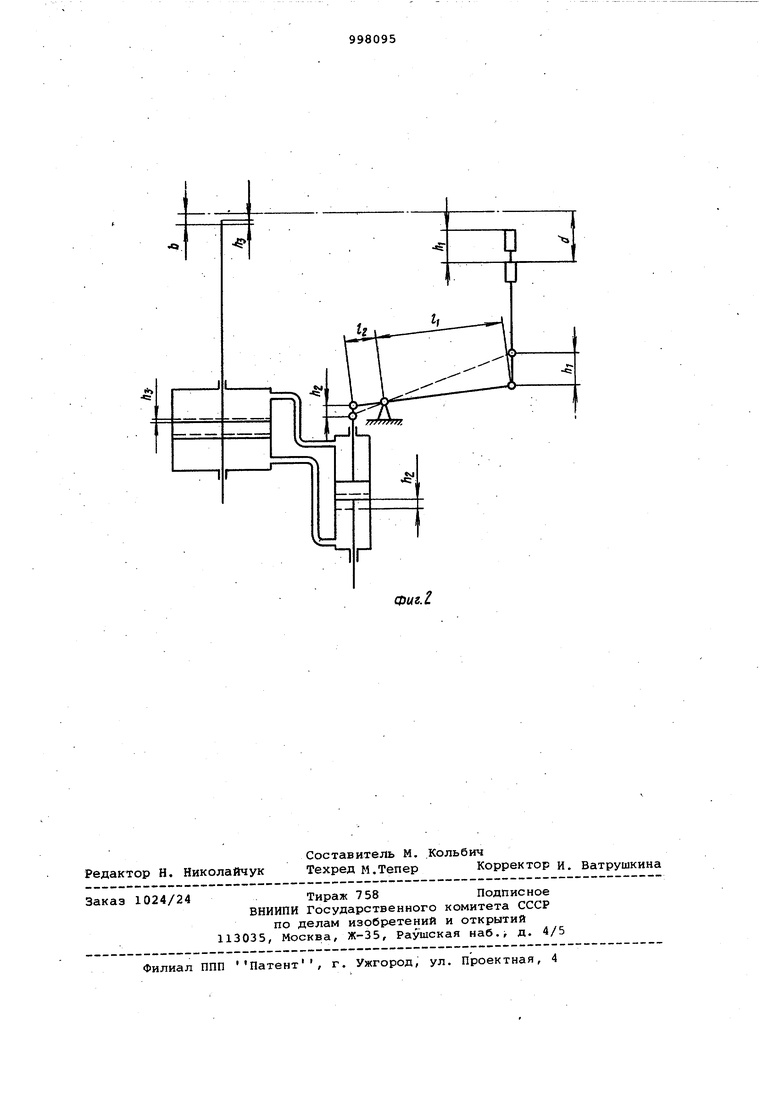
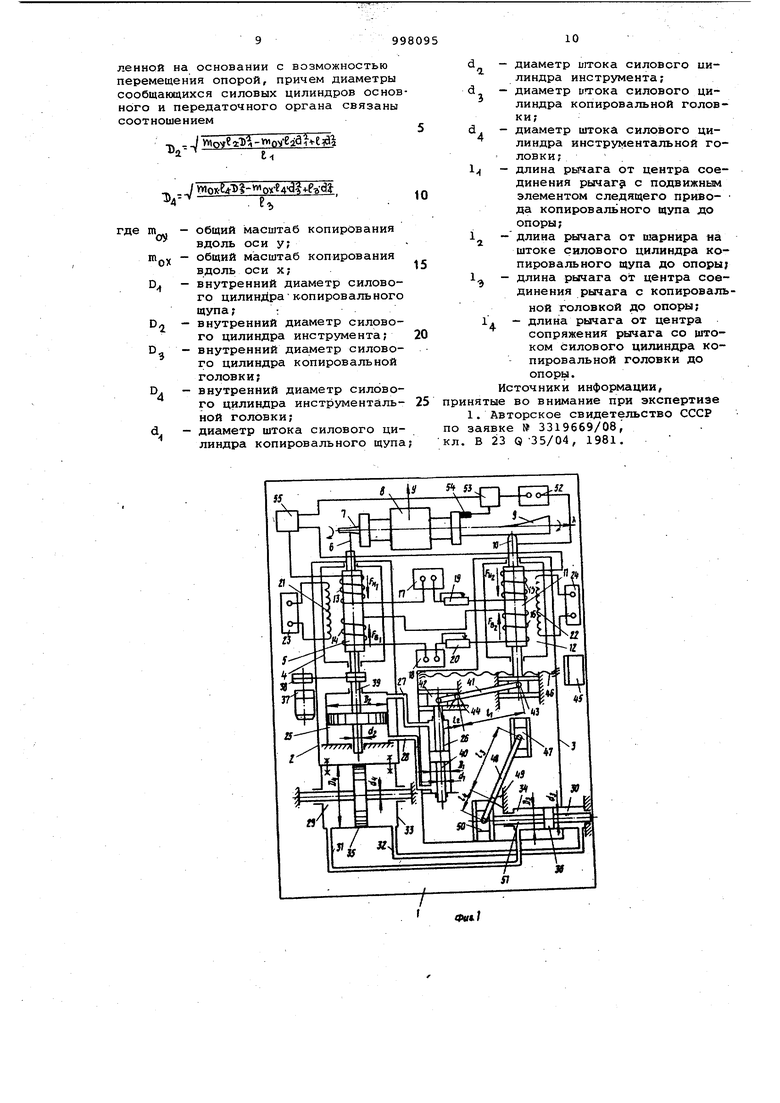
Изобретение относится к станкостроению и может, быть использовано при масштабном копировании детале.й, имеющих сложный профиль поверхности. Известен станок для копировальной обработки, включающий расположенные на основании инструментальныеи копи ровальные головки, снабженные следящим приводом с линейными электрическими двигателями, подвижные элементы которыхвыполнены в виде рабочего ин струмента и копировального иупа и жестко соединены друг с другом при . помощи основного передаточног.о органа, выполненного в виде сообщающихся силовых цилиндров, при этом инструментальная и копировальная головки соединены между собой дополнительным передаточнь м органом, выполненный в виде сообщающихся силовых цилиндров 1 . Недостатком известного станка является дискретный масштаб копирования так как для каждого масштаба обработки необходимо иметь набор цилиндров соответствующих диаметров. Цель изобретения - расширение тех нологических возможностей. С этой целью станок для копироваль ной обработки снабжен рычагами, один из которых предназначен для соединения копировального щупа с подвижным элементом основного передаточного рргана и снабжен опорой, установленной с возможностью перемещения относительно копировальной головки, которая ; жестко соединена с дополнительным передаточньаи органом посредством, в торсго рычага, размещенного на основании и также снабженного установленной на основании с.возможностью.перемещения опорой, причем диаметры сообщающихся . силовых цилиндров ОСНОВ.НОГО и передаточного органа связаны соотношением D -..)e,.D - moyeaaЗ4R.dl . . 1 . К --/ о - - ОУ - М, h . где т. - общий масиггаб копирований вдоль оси у; общий масштаб, копирования вдоль оси XJ внутренний диаметр силового цилиндра копировального щупа;D - внутренний диаметр силового цилиндра инструмента; внутренний диаметр силовог цилиндра копировальной головки;внутренний диаметр силовог цилиндра инструментальной головки; диаметр цтока силового цилиндра копировального щупа диаметр штока силового цилиндра инструмента; диаметр штока силового цилиндра копировальной голов ки; диаметр штока силового цилиндра инструментальной гоЛОВКИ;длина рычага от центра соединения рычага с подвижным элементом следящего привода копировального щупа до опоры; 1 - длина рычага от шарнира на штоке силового цилиндра, ко пировального щупа до опоры 1., - дХлина рычага от центра сое динения рычага с копироваль ной головки до опоры; 1. - длина рычага от центра сопряжения рычага со штоком силового цилиндра копировальной головки до опоры. На фиг. 1 изображена схема станка для копировальной обработки; на фиг. 2 - расчетная схема перемещений копи ровального щупа и инструмента при масштабном копировании. СтанЬк для копировальной обработк содержит основание 1, на котором установлены инструментальная 2 и копировальная 3 головки. Инструментальна головка 2 имеет следящий привод 4 в виде линейного электрического двигателя, подвижным элементом которого является якорь 5. На якоре 5 закреплен рабочий инструмент 6. Деталь 7 получает необходимые движения для об работки от привода 8, который сообща ет такие же синхронные движения и ко пиру 9. Копировальный щуп 10 установ лен на подвижном якоре И следящего привода 12, который выполнен в виде линейного электрического двигателя. Якори следящих приводов инструментальной и копировальной головок имеют по две якорные обмотки 13,14 и 15 16. Питание якорных обмоток осуществляется от источников постоянного тока 17 и 18, а регулирование силы тока в их цепи производится настроечными сопротивлениями 19 и 20. Следящие приводы снабжены также обмотками возбуждения 21 и 22, которые подключены к источникам постоянного тока 23 и 24. Якори следящих приводов жестко со единень: между собой передаточным органом в виде сообщающихся силовых цилиндров 25 и 26, полости которых coeдинены трубопроводами 27 и 2В. Инструментальная и копировальная головки, кроме того, жестко соединены между собой передаточным органом в виде двух сообщающихся силовых цилиндров 29 и 30, полости которых соединены трубопроводами 31 и 32, причем подвижным элементом силового цилиндра 29 является корпус 33, а корпус 34 силового цилиндра 30 закреплен на основании 1 станка. Порьчень 35 неподвижно установлен на основании 1 станка, а поршень 36 имеет возможность перемещаться совместно с копировальной головкой 3. Вращение инструменту 6 сообщает отдельный привод 37 через передачу 38, расположенную на штоке 39. Шток 40 силового цилиндра 26 связан с копировальным щупом 10 посредством рычага 41, одна кулиса 42которого связана шарнирно со штоком 40, а вторая кулиса 43 - с подвижным якорем 11 следящего привода 12. Рычаг 41 имеет также подвижную опору 44, которую можно перемещать относительно головки 3. Продольные перемещения вдоль оси у копировальная головка 3 получает от отдельного привода 45 посредством механизма 46 типа винт-гайка, а инструментальная головка 2 движение вдоль оси X получает от кулисы 47, закрепленной на копировальной головке-, через рычаг 48, который имеет подвижную опору 49, закрепленную на основании 1, кулису 50, установленную на штоке 51 силового цилиндра 30, и рабочую жидкость, перекачиваемую из силового цилиндра 30 в цилиндр 29. Всекулисы станка для копировальной обработки шарнирно связаны с соответствующими подвижными элементами станка. Для проведения копировальных работ в станке также предусмотрены источник питания 52, датчик тока 53, токопроводящая щетка 54 и блок управления 55. Станок для копировальных работ работает следующим образом. Обрабатываемую деталь 7 и копир 9 устанавливают на приводе 8 вдоль оси х и сообщают им синхронное вращение. Копировальный щуп 10 устанавливают на расстоянии а от оси х, а рабочий инструмент 6 на расстоянии в от той же оси специальными механизмами (не показаны), причем соотношение а является величиной масштаба т предстоящей копировальной обработки по оси у. Величины айв выбирают тaкими чтобы был гарантированный радиальный зазор между инструментом и обрабатываемой деталью, и, соответственно, между копировальным щупом и копиром. Затем закрепляют опоры 44 и 49 на копировальной головке и станине станка. Включают привод 8 вращения детали и копира, источники питания 17 и 18, 23 и 24, а также привод 37 вращения инструмента 6 и привод 45 продольной подачи, копировальной головки. При включении источников питания 17 и 18 происходит перемещение инстру мента 6 и копировального щупа 10 вдоль оси у в направлении сближения инструмента с деталью 6 и щупа с копиром 9 под действием электродинамических сил Р.и Р02 возникакнцих при взаимодействии магнитных потоков обмоток возбуждения 21 и 22 с током якорных обмоток 14 и 16. При движении копировального щупа 10 и инструмента 6 перемещаются также штоки 39 и 40, перераспределяется при этом рабочая жидкость в полостях силовых цилиндров 25 и 26. В то же время, при движении копировальной головки 3 перемещается шток 51, перераспределяя при этом рабочую жидкость в силовых цилиндрах 30 и 29. Наличие рабочей жидкости в сообщающихся силовых цилиндрах и кинематическая связь штоков 39 и 40 с якорями следящих пр водов, а также кинематическая связь копировальной головки со штоком 51 позволяют реализовать функциональную зависимость между величиной перемеще ния копировального щупа и инструмента вдоль осей X и у. Функциональная зависимость может быть выведена из следующих соображений. При перемещении копировального щу па 10 под действием силы FB/J. величину Ц (фиг.2) рычаг 41 повернется относительно опоры 44 на некоторый угол, соответственно шток 10 цилиндра 26 переместится н& величину hjj , определяемую из соотношения - -Ь-Е.ЫЕ При перемещении штока 40 рабочая жидкость перераспределится между по лостями гидроцилиндров 26 и 25 при условии, что где V - объем жидкости, вытесненно из полости силового цилинд ра 26; V- - объем жидкости, перешедший в полость силового цилиндр 25. ная конструктивные размеры силоцилиндров, можно записать ..(-) ,,5) V J- V b4TJa-d), h - величина перемещения штока 40; Ьл - величина перемещения втока 39г D - диаметр поршня цилиндра 26;. D - диаметр поршня цилиндра 25} d - диаметр штока Цилиндра 26; d - диаметр илтока цилиндра 25; h - величина перемещения поршня цилиндра 25, . - aOi-аЪ .51) еличина перемещения h поршня сиого цилиндра 25 является одноврено величиной перемещения инструта 6, поэтому масштаб обработки по оси у определяется как тавляя в выражение.-(8) из выраже(3) h и h из выражения (7) , пом: .. 1а-егШ- а) eiVia.) прощая выражение (9), можно запи- ii. (МгЙМ. Ег () Из уравнения - (10) можно определить исимость между величинами диаметпоршней силовых цилиндров копиальной и инструментальной головки: w.oyeгЧ),(з)a)v i o -Mi- ov a -Mz-eidi; (12) е Т --У1По гаТ 1- оУ Й Ь 1 3 а i ,(i 3) ) - (гЗ)-- оуеаД - -Ш 1 Соответственно для перемещений по X D -V ))-то -едка -ГЩ П5) 4 е,, в станке для копировальной обраббтпринимается, как правило, d-,--di-6-.,-34j тому решение задачи .несколько упается . Формулу (10) можно также записать: V
де m., - общий масштаб копирования
ov вдоль оси;
масштаб копирования вдоль
m
vp оси Y) получаемый при помощи
рьочага 41, m
il la
VP
масштаб копирования вдоль
mj,o,оси у, получаемый при помощи силовых цилиндров 26 и
D4 -d
25, т
m Ъ -Щ
Как правило, в станке для копировальной обработки есть величина постоянная,а главное регулирование масштаба копирования производят изменением плеч рычага.
Перемещение вдоль оси у инструмента б и копировального щупа 10 происходит до тех пор, пока- инструмент не углубитая в обрабатьоваемую деталь настолько/ что сила резания, противодействующая силам F и Fp,./станет
Э .
равная сумме сил
Ъл Й1
Величина суммы сил Fg, и Fgj. определяет .глубину резания, с которой пр исходит обработка по всей поверхности детали. . .
По мере снятия припуска с обрабатываемой детали происходит перемещение инструмента и копир.овального Щупа вдоль оси у до соприкосновения последнего с копиром 9. В этот момент происходит, замыкание электрической цепи источник- питания 52 - датчик тока-53 - щетка 54 - копир 9 - .копировальный щуп 10 - источник питания 52, и датчик тока 53посылает сигнал на блок управления 55. При наличии сигнала на блоке управления 55 замыкается цепь источник питания 17 - сопротивление 19 - обмотка 3,5 - блок управления 55 - обмотка 13 - .источник питания 17 и возникают электродинамические силы F|m и Гцз: которые направлены противоположно Fp и F0/i , а сумма их по величине больше суммы сил F. и
FP-f
ч. .
FH + Fg + F&i .
Поэтому происходит отвод копировального щупа-10 от копира 9, а инструмента б от детали 7 и разрыв электрической цепи в месте контакта копировального щупа 10 и копира 9, что вызывает, в свою очередь, исчезновение сил F, и и якори следящих приводов вновь движутся вперед вплоть до контакта копировального щупа с копиром, а инструмента - с обрабатываемой деталью.
Происходит ощупывание копира 9 щупом 10, а рабочий инструмент 6 повторяет все перемещение копировального щупа 10 в соответствуквдем масштабе, в автоколебательном режиме.
В процессе обработки происходит также непрерывное перемещение копиро
Бальной головки 3 вдоль оси х приводом 45, в результате чего с той же скоростью перемещается и кулиса 47. При перемещении кулисы 47 рычаг 48 поворачивается относительно неподвижной опсгг.ры 49, перемещая при этом кулису 50., а вместе с ней и шток 51 гидроцилиндра 30. Происходит перераспределение объемов рабочей жидкости между полостями силовых цилиндров 30 и 29, а так как 33 цилиндра 25закреплен на инструментальной годовке то происходит ее перемещение вдоль оси X в соответствующем масштабе.
В станке для копировальной обработки, как правило, геометрические размеры рычагов и силовых цилиндров передаточных органов выбираются из условия:
15-,, ,;
е;.е,,; ,
поэтому масштаб копирования по оси у получается равным, масштабу копирования по оси X..
При необходимости можно также получить различный масштаб копирования по осям к и у.
На станке легкЬ реализовать масштаб копирования 100 и более раз, что необходимо .при изготовлении микродеталей размером 1 мм и менее.
Станок прост в изготовлении и эксплуатации..
: Формула изобретения
Станок для копировальной обработки содержащий расположенные на основании инструментальнью и копировальные головки, снабженные следящим приводом с линейн дми электрическими двигателями-, подвижные элементы которых выполнены в виде рабочего инструмента и копировального щупа и жестко соединены друг с другом при помощи основного передаточного органа, выполненного в виде сообщающихся -силовых цилиндров, при этом инструментальная и копировальная головки соединены между собой дополнительным передаточным органом., выполненным в виде сообщалвдихся силовых цилиндров, о т личающийся тем, что, с цель расширения технологических возможностей, станок снабжен рычагами, один из которых предназначен для соединения копировального щупа с подвижным элементом основного передаточного органа и снабжен опорой, установпенной с возможностью перемещения относительно копировальной головки, которая жестко соединена с дополнительным передаточным органом посредством второго рычага, размещенного на основании, а также снабженного установленной на основании с возможностью перемещения опорой, причем диаметры сообщающихся силовых цилиндров основ ного и передаточного органа связаны соотношением T. - J ) ./ viox-e4T)- ovUd 4-e -d V где т, - общий масштаб копирования вдоль оси у; общий масштаб копирования вдоль оси X; внутренний диаметр силового цилиндракопироваль ного щупа; : внутренний диаметр силового цилиндра инструмента; внутренний диаметр силового цилиндра копировальной головки; внутренний диаметр силового цилиндра инструментальной головки; диаметр штока силового ци линдра копировального щупа - диаметр иггока силового иилиндра инструмента; - диаметр иггока силового цилиндра копировальной головки; , - диаметр штока силового цилиндра инструментальной головки; - длина рычага от центра соединения рычаг с подвижным элементом следящего приво- да копировального щупа до опоры; j, - длина рычага от шарнира на штоке силового цилиндра копировального щупа до опоры; - - длина рычага от центра соединения рычага с копировальной головкой до опоры; 1. - длина рычага от центра сопряжения рычага со штоком силового цилиндра копировальной головки до опоры. Источники информации, ятые во внимание при экспертизе . Авторское свидетельство СССР аявке 3319669/08, В 23 5 -35/04, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| Копировальный станок | 1981 |
|
SU997999A1 |
| Станок для копировальной обработки | 1985 |
|
SU1255391A2 |
| Гидравлическое следящее устройство к токарно-копировальным станкам для обработки некруглых поверхностей по объемным копирам | 1953 |
|
SU99594A1 |
| Копировальный станок | 1979 |
|
SU795898A1 |
| Станок для копировальной обработки | 1981 |
|
SU1134348A1 |
| Копировальный станок | 1980 |
|
SU1009719A1 |
| Многошпиндельный гравировальный копировально-фрезерный станок | 1953 |
|
SU116956A2 |
| КОПИРОВАЛЬНОЕ УСТРОЙСТВО13О? | 1972 |
|
SU349568A1 |
| Станок для обработки концов труб | 1986 |
|
SU1404202A1 |
| СПОСОБ КОПИРОВАЛЬНОЙ ОБРАБОТКИ, КОПИРОВАЛЬНЫЙ ТОКАРНО-ФРЕЗЕРНЫЙ СТАНОК "КТФ-1 МЕК" | 2007 |
|
RU2368484C2 |