Изобретение относится к взвешиванию и может быть использовано для взвешивания транспортных средств.
Известен способ взвешивания, при котором измеряют вертикальные перемещения грузоприемной платформы и амплитуды рельсовых неровностей на прилегающих участках пути к грузоприемной платформе и на самой платформе, вычисляют частотную характеристику вертикального перемещения грузоприемной платформы и составляют математическую модель вагонов и вертикального перемещения грузоприемной платформы, по которой с учетом амплитуды рельсовых неровностей вычисляют вертикальные перемещения грузоприемной платформы и расчетную частотную характеристику расчетного вертикального перемещения этой платформы. Затем вычисляют квадратичный функционал разности полученных частотных характеристик, минимизируя который определяют действительные значения массы кузова вагона и колесной пары, суммируя которые получают массу вагона.
Однако известный способ имеет следующие недостатки. Практика эксплуатации подвижного состава показывает, что амплитуды рельсовых неровностей имеют ярко выраженный случайный характер. Это приводит к тому, что частотная характеристика системы грузоприемная платформа - рельс становится широкополосной, а минимизация квадратичного функционала разности частотных характеристик требует большого числа вычислений, что увеличивает погрешность при определении нагруженности осей транспортного средства.
Кроме того, получение частотной характеристики экспериментальным путем требует проведения замеров по двум каналам (1 канал - измерение неровностей, 2 канал - измерение перемещений грузоприемной платформы), что в свою очередь также увеличивает погрешность. При этом, с целью исключения динамических составляющих, действующих на грузоприемную платформу со стороны транспортного средства, взвешивание, как правило, производят при низких скоростях движения в достаточно узком их диапазоне. Однако управление транспортным средством при низких скоростях весьма затруднено. Это приводит к тому, что обеспечить равномерное движение транспортного средства по грузоприемной платформе на низких скоростях трудно, а неравномерность движения увеличивает погрешность при взвешивании за счет влияния сил трения в сцепных устройствах.
Целью предложенного способа является снижение погрешности взвешивания и расширение диапазона скоростей при взвешивании транспортных средств в движении.
Это достигается тем, что на грузоприемной платформе и на прилегающих к ней участках пути создают неровности, имеющие одинаковую амплитуду и постоянный период и на этих участках измеряют скорость движения транспортных средств, вычисляют спектральную плотность измеренных вертикальных перемещений грузоприемной платформы, а также спектральную плотность неровностей, которую подают на вход математической модели, с выхода которой получают спектральную плотность расчетного вертикального перемещения грузоприемной платформы. Затем составляют квадратичный функционал разности спектральной плотности измеренного вертикального перемещения и спектральной плотности расчетного вертикального перемещения грузоприемной платформы, который минимизируют и в результате определяют нагруженность осей транспортного средства, суммируя которые определяют массу транспортного средства.
Введение периодических неровностей на участках пути, примыкающих к грузоприемной платформе и на самой платформе, измерение скорости движения транспортного средства, а также определение его массы путем минимизации квадратичного функционала разности спектральных плотностей, полученных расчетным путем по математической модели и по измеренным перемещениям грузоприемной платформы, позволило расширить диапазон скоростей при взвешивании, снизить погрешность взвешивания за счет исключения влияния сил трения в сцепных устройствах и динамических сил, передаваемых на грузоприемную платформу как со стороны рессорного подвешивания транспортных средств, так и со стороны основания пути, на которое уложена эта платформа.
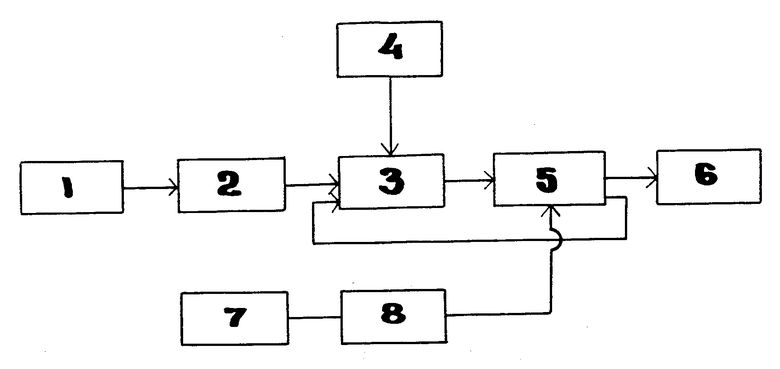
На чертеже представлена блок-схема способа взвешивания транспортных средств в движении.
Она содержит блок 1, в котором хранятся значения амплитуды неровности и ее период; блок 2 преобразования функции неровности в спектральную плотность неровности; блок 3 математического моделирования движения транспортного средства и перемещения грузоприемной платформы, блок 4, в котором хранится измеренная скорость движения транспортного средства; блок 5 - минимизатор квадратичного функционала разности спектральных плотностей; блок 6 - сумматор; блок 7, в котором хранятся перемещения грузоприемной платформы; блок 8 преобразования измеренного перемещения грузоприемной платформы в спектральную плотность перемещения.
Предлагаемый способ взвешивания транспортных средств в движении реализован следующим образом.
Измеренные значения амплитуд неровностей (блок 1) в блоке 2 преобразуются в спектральную плотность неровности, которая подается на вход математической модели (блок 3). На этот же вход подается измеренное значение скорости движения транспортного средства (блок 4), а выхода математической модели получают спектральную плотность расчетного вертикального перемещения грузоприемной платформы.
В блоке 7 хранятся измеренные перемещения грузоприемной платформы, которые в блоке 8 преобразуются в соответствующую спектральную плотность измеренных перемещений. Спектральные плотности с выходов блоков 3 и 8 подают на вход минимизатора (блок 5), в котором ищется минимум невязки 1 квадратичного функционала разности
I= S(ω-Sр(ω)
S(ω-Sр(ω) где S( ω) - спектральная плотность измеренного перемещения грузоприемной платформы;
где S( ω) - спектральная плотность измеренного перемещения грузоприемной платформы;
Sp( ω) - спектральная плотность расчетного перемещения грузоприемной платформы.
При этом, поскольку скорость транспортного средства известна (блок 4), измеренную и расчетную спектральные плотности перемещений грузоприемной платформы приводят к одной скорости, что позволяет выполнять взвешивание практически на любой скорости. Получаемые в ходе расчетов значения сил трения в сцепных устройствах и динамических сил, передаваемые на грузоприемную платформу со стороны рессорного подвешивания транспортного средства и основания под грузоприемной платформой, исключаются путем обычного алгебраического вычитания в блоке 6.
Использование предлагаемого способа взвешивания транспортных средств в движении обеспечивает снижение погрешности взвешивания за счет исключения динамических сил и сил трения в сцепных устройствах, а также расширение диапазона скоростей взвешивания за счет создания искусственных неровностей на прилегающих участках пути и на грузоприемной платформе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2020 |
|
RU2745481C1 |
| Способ оценки динамической жёсткости рельсового пути и устройство для его реализации | 2019 |
|
RU2731163C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| Способ взвешивания автомобилей в движении и устройство для его осуществления | 1983 |
|
SU1276916A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ И ПАРАМЕТРОВ МЕХАНИЗМОВ ИХ ОЧАГОВ В УСЛОВИЯХ СИЛЬНЫХ СЕЙСМИЧЕСКИХ ПОМЕХ (ВАРИАНТЫ) | 2012 |
|
RU2494418C1 |
| Способ определения координат радиоизлучающего объекта в рабочей зоне многопозиционного пассивного радиотехнического комплекса и устройство для его осуществления | 2020 |
|
RU2757197C1 |
| СИСТЕМА, УСТРОЙСТВО И СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА, ПОГРУЗОЧНОГО УСТРОЙСТВА И ГРУЗА ПРИ РАБОТЕ ПОГРУЗОЧНОГО УСТРОЙСТВА | 2012 |
|
RU2623295C2 |
| Способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (эвм) и измерительных устройств,смонтированых в путеизмерительном вагоне | 1976 |
|
SU618476A1 |
| ДИНАМИЧЕСКИЙ МОНИТОРИНГ МОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745984C1 |
Использование: изобретение относится к области взвешивания и может быть использовано для взвешивания транспортных средств в движении. Сущность изобретения: при взвешивании транспортных средств на грузоприемной платформе и на прилегающих к ней участках пути создают неровности, имеющие одинаковую амплитуду и постоянный период, и на этих участках измеряют скорость движения транспортных средств,вычисляют спектральную плотность измеренных вертикальных перемещений грузоприемной платформы, а также спектральную плотность неровностей, которую подают на вход математической модели. С выхода последней получают спектральную плотность расчетного вертикального перемещения грузоприемной платформы, затем составляют квадратичный функционал разности спектральной плотности измеренного вертикального перемещения и спектральной плотности расчетного вертикального перемещения грузоприемной платформы, который минимизируют и в результате определяют нагруженность осей транспортного средства, суммируя которые определяют массу транспортного средства. 1 ил.
СПОСОБ ВЗВЕШИВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ В ДВИЖЕНИИ, заключающийся в том, что измеряют вертикальные перемещения грузоприемной платформы и амплитуды неровностей на прилегающих участках пути к грузоприемной платформе и на самой платформе, вычисляют частотную характеристику вертикального перемещения грузоприемной платформы и составляют математическую модель движения транспортного средства и перемещения грузоприемной платформы, отличающийся тем, что на грузоприемной платформе и на прилегающих к ней участках пути создают неровности, имеющие одинаковую амплитуду и постоянный период, и на этих участках измеряют скорость движения транспортных средств, вычисляют спектральную плотность вертикальных перемещений грузоприемной платформы, а также спектральную плотность неровностей, которую подают на вход математической модели, с выхода которой получают спектральную плотность расчетного вертикального перемещения грузоприемной платформы, затем составляют квадратичный функционал разности спектральной плотности измеренного вертикального перемещения и спектральной плотности расчетного вертикального перемещения грузоприемной платформы, который минимизируют и определяют нагруженности осей транспортного средства, суммируя которые определяют массу транспортного средства.
| Весы для взвешивания транспортных средств в движении | 1978 |
|
SU932270A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
