Изобретение относится к автоматическому управлению подвижным объектом, в частности к устройствам стабилизации судна в заданном направлении при отсутствии хода.
Цель изобретения - повышение точности системы стабилизации курса судна.
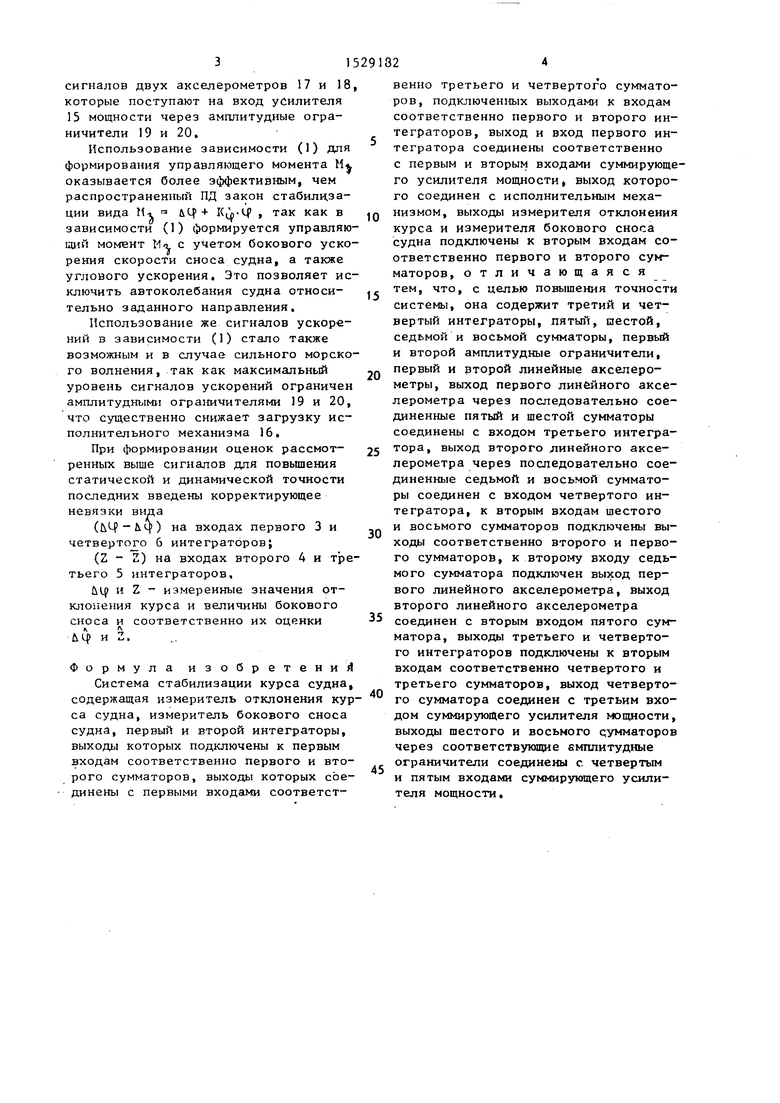
На чертеже представлена функциональная схема предлагаемой системы.
Система содержит измеритель 1 бокового сноса судна, измеритель 2 отклонения курса судна, четыре интегратора 3-6, восемь сумматоров 7-14, суммирующий усилитель 15 мощности, исполнительный механизм 16, два линейных акселерометра 17 и 13, и два амплитудных ограничителя 19 и 20.
Система работает следующим образом.
При отклонении судна по курсу относительно заданного направления на выходе усилителя 15 мощности формируется сигнал
м, ,7+Кц6 -и v , (i)
который поступает на исполнительный механизм 16, и последний создает управляющий момент, воздействующий на судно и приводящий его к прежнему курсу.
Сигнал q оценки отклонения судна по курсу вырабатывается Hd выходе первого интегратора 3 путем двойного интегрирования сигналов ускорений с акселерометров 17 и 13.
Сигнал (jf оценки скорости изменения курса вырабатывается путем однократного интегрирования тех же сигналов на выходе четвертого интегратора 6.
Сигнал i оценки скорости бокового сноса вырабатывается третьим интегратором 5 путем интегрирования сигналов ускорений с акселерометров 17 и 18,
Сигналы со и V, ограниченные по амплитуде, - yrjTOBoe и линейное ускорения - снимаются как разность и сумма
С/)
сигналов двух акселерометров 17 и 18, которые поступают на вход усилителя 15 мощности через амплитудные ограничители 19 и 20.
Использование зависимости (1) для формирования управляющего момента М оказывается более эффективным, чем распространенный ПД закон стабилизации вида 11, ЛЦ + Кцр М так как в зависимости (1) формируется управляющий момент W-t с учетом бокового ускорения скорости сноса судна, а также углового ускорения. Это позволяет исключить автоколебания судна относительно заданного направления.
Использование же сигналов ускорений в зависимости (1) стало также возможным и в случав сильного морского волнения, так как максимальный уровень сигналов ускорений ограничен амплитудными ограничителями 19 и 20, что существенно снижает загрузку исполнительного механизма 16.
При формировании оценок рассмотренных выше сигналов для повьппения статической и динамической точности последних введены корректирующее невязки вида
() на входах первого 3 и четвертого 6 интеграторов;
(Z - Z) на входах второго 4 и третьего 5 интеграторов,
йц и Z - измеренные значения от- кпоиения курса и величины бокового сноса и соответственно их оценки
ДЦ И Z.
Формула изобретений Система стабилизации курса судна, содержащая измеритель отклонения курса судна, измеритель бокового сноса судна, первый и второй интеграторы, выходы которых подключены к первым входам соответственно первого и второго сумматоров, выходы которых соединены с первыми входами соответст
венно третьего и четвертого сумматоров, подключен1шх выходами к входам соответственно первого и второго интеграторов, выход и вход первого интегратора соединены соответственно с первым и вторым входами суммирующего усилителя мощности, выход которого соединен с исполнительным механизмом, выходы измерителя отклонения
курса и измерителя бокового сноса судна подключены к вторым входам соответственно первого и второго сумматоров, отличающаяся тем, что, с целью повышения точности системы, она содержит третий и четвертый интеграторы, пятый, шестой, седьмой и восьмой сумматоры, первый и второй амплитудные ограничители, первый и второй линейные акселерометры, выход первого линейного акселерометра через последовательно соединенные пятый и шестой сумматоры соединены с входом третьего интегратора, выход второго линейного акселерометра через последовательно соединенные седьмой и восьмой сумматоры соединен с входом четвертого интегратора, к вторым входам шестого и восьмого сумматоров подключены выходы соответственно второго и первого сумматоров, к второ1«гу входу седьмого сумматора подключен выход первого линейного акселерометра, выход второго линейного акселерометра соединен с вторым входом пятого сумматора, выходы третьего и четвертого интеграторов подключены к вторым входам соответственно четвертого и третьего сумматоров, выход четвертого сумматора соединен с третьим входом суммирующего усилителя мощности, выходы шестого и восьмого сумматоров через соответствующие амплитудные ограничители соединены с четвертым и пятым входами суммирующего усилителя мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система динамического позиционирования судном | 1989 |
|
SU1615678A1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2007 |
|
RU2332642C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2020417C1 |
| Измеритель углов ориентации подвижного объекта | 1991 |
|
SU1793228A1 |

Изобретение касается управления движением морскими судами. Система позволяет повысить точность стабилизации курса судна, что достигается введением двух линейных акселерометров, двух амплитудных ограничителей и двух интеграторов. Это позволило ввести в закон управления ограниченные по амплитуде сигналы оценок поперечных и угловых ускорений и оценку поперечной скорости судна. 1 ил.
| Авторулевой | 1973 |
|
SU460534A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР № 1321270, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
