Предлагаемое изобретение относится к области судостроения в частности к системам управления движением судна.
Известны системы динамического позиционирования судна (А. С. СССР 1615678) стабилизирующие положение наводного либо подводного судна в пространстве. Известно также устройство управления движением судна (А.С. СССР 979204), принятое нами в качестве прототипа, содержащее задатчик курса, датчик курса, датчик угловой скорости, датчик положения пера руля, сумматор и усилитель.
Устройство управляет рулевым приводом, который в свою очередь поддерживает заданное направление движения судна. Для повышения точности стабилизации судна на заданном курсе устройство содержит интегратор, который смешает руль при появлении возмущающего момента. Однако блок интегрирования решает эту задачу только при инфранизкочастотных изменениях возмущающего момента. Низкое быстродействие интегрирующего блока объясняется тем, что допустимая величина коэффициента передачи обычно в тысячи раз меньше, чем при сигнале курса. Незначительное увеличение крутизны сигнала интервала приводит к потере устойчивости замкнутой системы "судно - рулевой привод - устройство управления".
В целом ряде случаев использования рассмотренных выше систем и устройств при появлении возмущений приводит к необходимости перехода на ручное управление.
Кроме того, существующие системы автоматического управления (стабилизации) инерционными объектами, каковыми являются морские суда, часто не позволяют использовать всю эффективность исполнительных органов (рулей), так как максимальное отклонение рулей в замкнутой системе автоматического управления можно получить только при недопустимых отклонениях курса корабля от заданных значений.
Целью предлагаемого изобретения является использование всей эффективности исполнительных органов при МАЛЫХ ошибках стабилизации судна, т.е. повышение качества управления.
В предлагаемом устройстве рассмотренные недостатки устранены благодаря введения в устройство задатчика смещения руля и блока программ.
В целом ряде случаев момент появления возмущающего воздействия заранее известен и поэтому необходимое управляющее воздействие можно заранее запрограммировать и ввести в нужный момент времени так же, как исключить его, после того как возмущающее воздействие исчезнет.
В устройстве это достигается программным блоком, который получает сигнал о появлении возмущения и выдает соответствующую уставку на задатчик смещения руля. На выходе задатчика смещения руля вырабатывается сигнал, который поступает на вход суммирующего усилителя. При этом произойдет смещение руля на величину, необходимую для компенсации поступившего возмущения. Несоответствие (незначительное) между возмущающим и управляющим воздействием будет компенсироваться "ПД" законом управления при МАЛОМ отклонении судна от заданного направления движения.
На чертеже приведена блок-схема предлагаемого устройства.
Устройство управления движением судна содержит: задатчик курса 1, датчик курса 2, датчик угловой скорости судна 3, датчик положения руля 4, суммирующий усилитель 5, задатчик смещения руля 6, блок программ 7, рулевой привод 8, судно 9.
В качестве датчиков и задатчиков курса и руля могут использоваться измерители угла поворота с точностью измерения 2-4%. Датчик угловой скорости -типовой ДУС -5 с диапазоном измерения 0.05- 1.5 o/сек. Суммирующий усилитель 5 может быть реализован на операционном усилителе типа 140 УД -6. Блок программы реализуется на типовых логических счетно-решающих элементах. Перечисленные блоки соединены между собой в соответствии с чертежом.
Описание работы устройства.
Устройство управления движением судна позволяет стабилизировать судно с МАЛЫМИ ошибками при появлении больших возмущений. Это достигается тем, что балансировочное положение руля смещается на величину, которая необходима и достаточна для компенсации появившихся возмущений (момент появления которых и величина известны).
При отсутствии возмущений устройство функционирует как прототип. Угол перекладки руля будет:
где ϕ, ϕзад. - текущий и заданный курс судна, - угловая скорость судна,
- угловая скорость судна,
δ - угол перекладки руля.
При появлении ошибки в угле стабилизации судна руль отклонится на величину, пропорциональную этой ошибке, и приведет судно на прежнее - заданное направление движения.
При появлении большого возмущения сигнал об этом поступит в блок программы 7, на выходе которого появится соответствующий сигнал, который поступит на вход задатчика смещения руля 6. С выхода 6 напряжение поступит на вход суммирующего усилителя 5, которое будет алгебраически суммироваться с сигналами, приведенными в зависимости (1) при этом руль дополнительно сместится на величин δзад. (по сравнению с случаем, когда большое возмущение отсутствует). В этом случае зависимость (1) дополнится сигналом δзад. и будет иметь вид:
где сигнал δзад. пропорционален величине появившегося большого возмущения (величина которого известна заранее).
Предложенное устройство может эффективно использоваться на судах, оборудованных специальными сбрасываемыми объектами (ложные цели, тралы, геодезические буи и др.), при сбрасывании которых появляются большие возмущения, величина последних заранее известна.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2238881C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СУДНОМ С ДИАГНОСТИКОЙ | 2004 |
|
RU2267440C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2312789C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУДУЩЕГО СОСТОЯНИЯ КОРАБЛЯ | 2001 |
|
RU2189624C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2306239C1 |
Изобретение относится к управлению морскими судами, в частности к автоматизации управления движением судна. Технический результат изобретения заключается в повышении качества управления. Решается задача создания автоматического устройства управления (стабилизации) судна на заданном направлении при воздействии сильных возмущений, величина которых заранее известна. Поставленная задача решается введением задатчика смещения руля и блока программ, который через задатчик смещения руля подключен к соответствующему входу суммирующего усилителя. Названные блоки смещают балансировочное положение руля при появлении возмущения. 1 ил.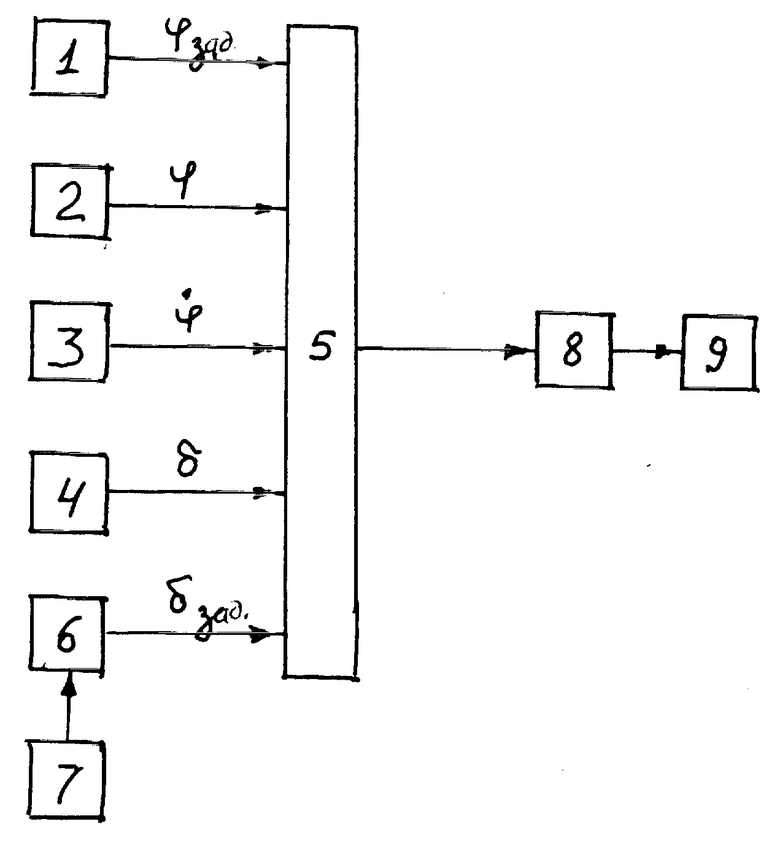
Устройство управления движением судна, содержащее задатчик курса, датчик курса, датчик угловой скорости, датчик положения руля, выходы которых подключены к первому, второму, третьему, четвертому входам суммирующего усилителя, выход которого соединен с входом рулевого привода, отличающееся тем, что дополнительно содержит задатчик смещения руля и блок программ, выполненный с возможностью получения сигнала о появлении возмущения и выдачи соответствующей установки, который через задатчик смещения руля подключен к пятому входу суммирующего усилителя.
| Устройство управления движением судна | 1981 |
|
SU979204A1 |
| Система динамического позиционирования судном | 1989 |
|
SU1615678A1 |
| ПРОГРАММНОЕ ЗАДАЮЩЕЕ УСТРОЙСТВО | 0 |
|
SU316077A1 |
