/J
г7 в 21 20 2
gjus.i
ff
(Л
4: IsD
ОО 4 4 СО
Изобретение относится к транспортному машиностроению, а именно к гусеничным транспортньтм средствам.
Цель изобретения - повьштение про- ходимости движителя на слабых грунтах.
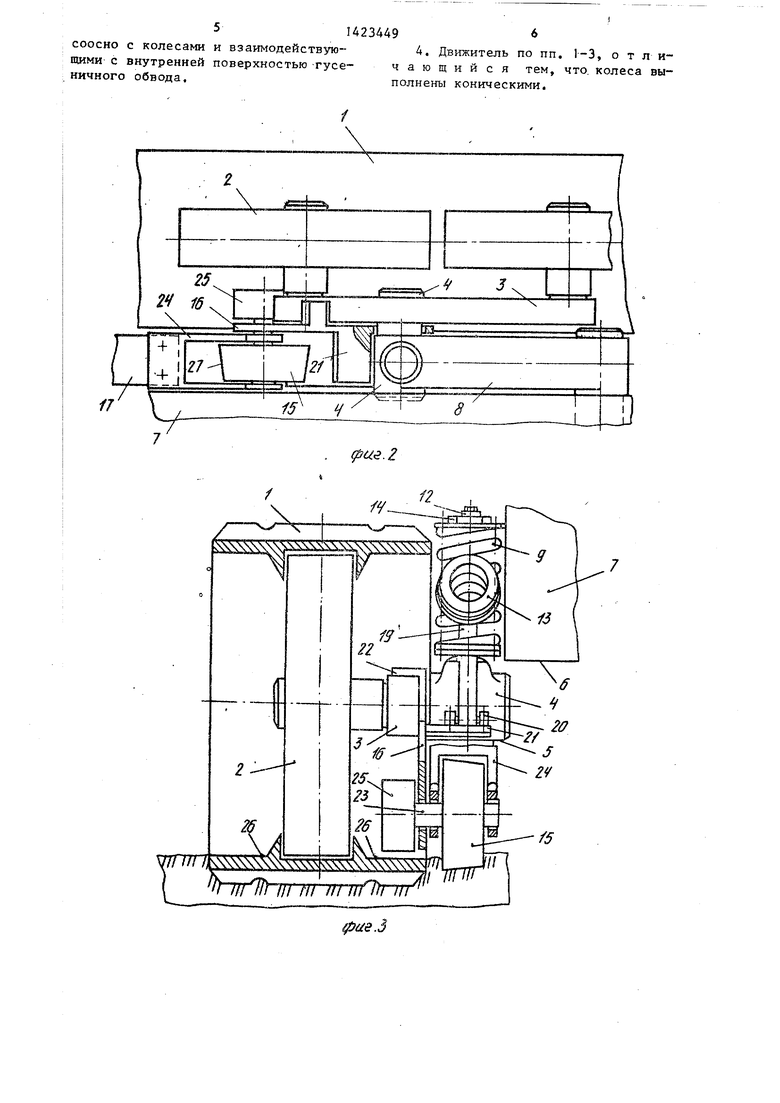
На фиг.1 показан движитель гусеничного транслортного средства, вид сбоку; на фиг, 2 - то же вид сверху; на фиг. 3 - то же, вид спереди; на фиг. 4 - кинематическая схема движителя.
Движитель гусеничного транспортного средства содержит гусеничные об- воды I, опорные катки 2, установлен™ ные на плечах балансиров 3, оси 4 которых и нижние точки 5 осей 4 распо- ложены ниже уровня днища 6 рамы 7 в межгусеничном пространстве и смонти- розаны в несущих поворотных относительно рамы. 7 рычагах 8 На раме 7 установлены упругие элементы 9 подвесок, кронштейн 10 с шаровой опорой и кронштейн И, жестко связанный с рамой, В кронштейнах 10 и II установ- Ьтен направляющий шток 12, который перемещается вверх вместе с рычагом 8 кронщтейном 10 при наездах опорных катков 2 на препятствия со сжатием |упругих элементов 9 при этом. Упру- |гий элемент 13 направляющего колеса |(не показано) размещается на раме 7 транспортного средства под верхней ветвью гусеничного обвода I. Упругие элементы 9 можно предварительно сжать ; Ши ослабить гайкой 14, навернутой iia, резьбовую часть штока 12. Движи- jrejib снабжен колесами IS, рычагами 1б их подвеса и гибкой связью 7,при WOM рычаги 16 подвеса установлены (t возможностью поворота вокруг осей 4 передних балансиров 3 и подпружине- йы с помощью упругих элементов 18, установленных внутри одной из спи- ральных пружин 9, При этом усилие от Пружины 18 через дополнительньй шток 19, установленный в направляющих ниж Него кронштейна 10, и через ролики 210 передается на специально выполненн ук) площадку 21 рычага 16, вследст- в1ие чего колесо 15 постоянно прижимается к нижнему положению, ограниченному специальным ограничителем 22, выполненным также заодно с рычагом 16. Колеса 15 смонтированы на рычагах б с возможностью поворота вокруг оси 23 в межгусеничном пространстве, в зЬне передних опорных катков 2. Ширина колеса I5 выбирается приблизительно равной длине оси 4 поворотного рычага 8. Гибкая связь 17 в натянутом состоянии одним концом закреплена неподвижно OTHOCHTejjbHO рамы 7. Гибкая связь може.,т быть выполнена в виде прорезиненной или металлической ленты, цепи, троса и т.п. Осевая линия гибкой связи 17 должна быть параллельна набегающей ветви гусеничного обвода I. Гибкая связь 17 соединена с осью 23 колеса 15 посредством промежуточной тяги 24. Каждый из рычагов 16 снабжен роликом 25, установленным на этом рычаге соосно с колесом 15 с возможностью вращения в плоскости, параллельной плоскости поворота рычага 16 и взаимодействия с внутренней поверхностью 26 нижней ветви гусеничного обвода 1 при перекосах гусеничного обвода I под первым опорным катком 2. Опорная часть 27 дополнительных колес 15 выполнена в форме усеченного конуса. Такая форма опорной части способствует уплотнению боковых стенок колеи, создаваемой двшш- телем, и предотвращает осыпание грунта на гусеничный обвод 1 и под катки 2 . Рычаг 16 снабжен жесткой задней плоскостью 28.
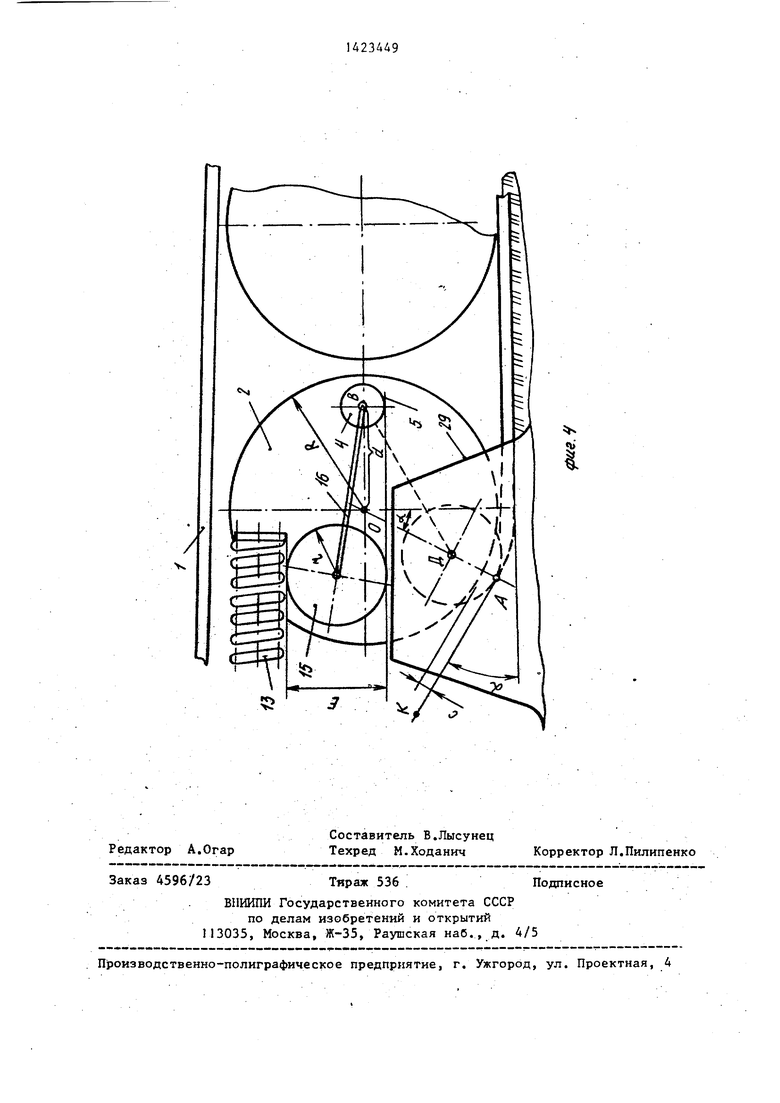
Ось колеса 15 расположена на линии АО (фиг.4), перпендикулярной средней линии набегающей ветви гусеничного обвода I. Кроме того, нижняя точка А колеса 15 находится на, уровне плоскости АК опорных площадок звеньев гусеничного обвода 1 и выше уровня плоскости РТ (фиг.1) нижних точек грунтозацепов. В то же время, как показано на фиг.З, колесо 15 при подъеме может входить в зазор между вертикальной стенкой рамы 7 и вертикальной плоскостью внутренних краев гусеничного обвода 1. Это обеспечива ет подъем колеса на наибольшую высоту при пропуске препятствий 29 под колесом 15. В то же время подъем колеса 15 ограничен упругим элементом 13 направляющего колеса.
Длина рычага 16 выполнена в соответствии с соотношением
1 а + 2a-d sino + d
где a R-r+c;
1 - ОД (длина рычага 16); г - радиус колеса 15; R - радиус переднего опорного катка 2;
с - толщина гусеничного обвода
в поперечном сеченни; oi - угол наклона передней ветви гусеничного обвода (угол между линией ОА и вертикалью); d - расстояние от оси катка 2
до оси 4 его балансира. Движитель работает следующим образом.
При движении транспортного средства по твердому грунту как прямо, так и при поворотах колея под движителем не образуется и набегающий участок гусеничного обвода I вместе с колесом 15 не воздействует на до- рогу.,
Если в этом случае перед колесом 15 будет находиться препятствие, то прежде всего это препятствие коснется гибкой связи 17. Поскольку связь 17 натянута, то с ее поднятием от препятствия потянется вверх и колесо
При движении транспортного средства на ловоротах, т,е, при криволинейном движении, из-за близости оси
g 4 балансира с осью колеса 15 мгновенные радиусы их поворота относительно мгновенных центров вращения транспортного средства практически равны, Б этом случае колея от колеса 15 та; 10 же всегда создается под цапфой 4 балансира, поэтому сопротивлени г движению, обусловленное смещением грунта цапфбй 4, равно нулю, так как масса смещаемого грунта равна
15 нулю,
Формула изобретения
1. Движитель гусеничного транс- 20 портного средства, содержащий раму, опорные катки, установленные на балансирах, оси которых расположены ниже уровня днища рамы, поворотные рычаги, связывающие щарнирно балан15 и чем ближе колесо 15 к препятст- 25 сиры с рамой, гусеничный обвод,ус- вию, тек вьше оно поднимается отно- тановленный вокруг опорных катков, сительно исходного положения. Конст- отличающийся тем, что, рукция движителя обеспечивает за счет с целью повышения проходимости на гибкой натянутой связи 17 поднятие слабых грунтах, он снабжен колесами, колеса 15 на препятствие по мере дви- 30 рычагами их подвеса и гибкой связью, жения трансп ортного -средства вперед. рычаги подвеса колес установлены щар- При движении назад приподнимает коле- нирно на балансирах и подпружинены, со 15 задняя плоскость 28 рычага 16. колеса установлены с внутренней стороны гусеничного обвода в межгусеничПри движении транспортного средст- 35 ° пространстве, а гибкая связь зак- ва по слабому грунту после одного - раплена одним концом на раме, а дру- трех проходов по следу набегающий гим - на оси колес, при этом длина участок гусеничного обвода вместе с рычагов подвеса колес выполнена в со- колесом 15 одновременно входит в кон- ответствии с выражением
такт с грунтом. Под движителем грунт 40
деформируется, и после каждого проез- 1 V а + 2ad + d , да транспортного средства по одному следу глубина колеи увеличивается, . Ширина колеи равна ширине гусеничного обвйда I, сложенной с шириной колеса 15. Ширина колеса 15 выбирается практически равной длине оси 4 поворотного рьпага 8 и поэтому под этой, цапфой и колесом I5 грунт деформируется. Таким образом, под осью 4 грун- so та нет сопротивления движению, что повьшает проходимость транспортного средства. Внутренние кромки гусеничного обвода 1 не прихватывают грунт со стенок колеи, так как эти стенки удалены на расстояние, равное ширине колеса 15, Это также уменьшает сопротивление движению транспортного средства.
45
где а 1 R
R - г + с;
длина рычагов подвеса колес; радиус опорного катка; толщина гусеничного обвода; угол наклона передней ветви гусеничного обвода; расстояние от оси опорного
катка до оси поворота балансира;
радиус колеса. Движитель ПОП.1, отли-- чающийся тем, что рычаги под- сс веса колес снабжены ограничителями их поворота относительно балансира, 3. Движитель попп, 1и2, отличающийся тем, что он . снабжен роликами, установленньида
с о/ - d г 2.
23А49
При движении транспортного средства на ловоротах, т,е, при криволинейном движении, из-за близости оси
g 4 балансира с осью колеса 15 мгновенные радиусы их поворота относительно мгновенных центров вращения транспортного средства практически равны, Б этом случае колея от колеса 15 та; 10 же всегда создается под цапфой 4 балансира, поэтому сопротивлени г движению, обусловленное смещением грунта цапфбй 4, равно нулю, так как масса смещаемого грунта равна
15 нулю,
Формула изобретения
1 V а + 2ad + d , o
5
где а 1 R
R - г + с;
длина рычагов подвеса колес; радиус опорного катка; толщина гусеничного обвода; угол наклона передней ветви гусеничного обвода; расстояние от оси опорного
катка до оси поворота балансира;
радиус колеса. Движитель ПОП.1, отли-- чающийся тем, что рычаги под- с веса колес снабжены ограничителями их поворота относительно балансира, 3. Движитель попп, 1и2, отличающийся тем, что он . снабжен роликами, установленньида
с о/ - d г 2.
ие.г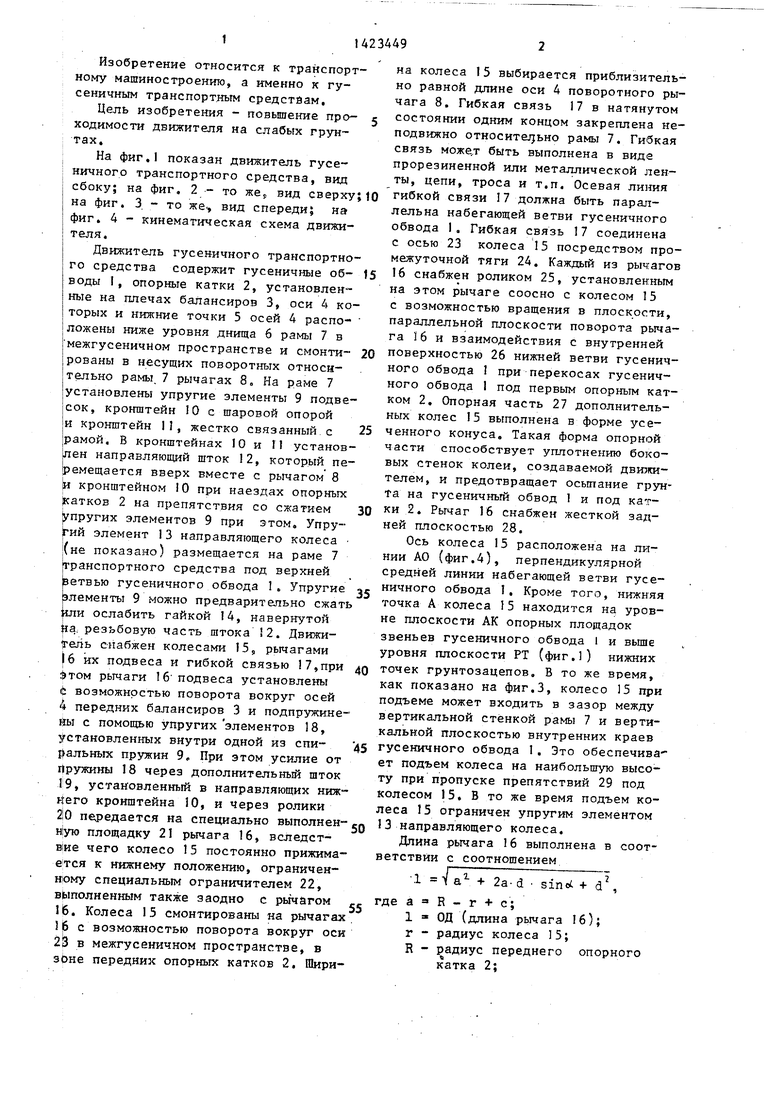

| название | год | авторы | номер документа |
|---|---|---|---|
| Гусеничное транспортное средство | 1982 |
|
SU1121169A1 |
| Транспортное средство | 1989 |
|
SU1652171A1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| Комбинированный движитель транспортного средства | 1980 |
|
SU918162A1 |
| Ходовая часть гусеничного транспортного средства | 1987 |
|
SU1461679A1 |
| Гусеничный движитель | 1980 |
|
SU882811A1 |
| СПОСОБ ПОВЫШЕНИЯ ПОДВИЖНОСТИ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА НА ГРУНТАХ С ВЫСОКОЙ АДГЕЗИЕЙ И САМОХОДНОЕ ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2028242C1 |
| Ходовая часть транспортного средства | 1991 |
|
SU1784519A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОЧВЫ | 1993 |
|
RU2064741C1 |
| СПОСОБ ОБКАТКИ ГУСЕНИЧНЫХ ЛЕНТ НА СТЕНДЕ (ВАРИАНТЫ) | 2010 |
|
RU2423681C1 |
Изобретение относится к транспортному машиностроенрпо и позволяет повысить проходимость движителя гусеничного транспортного средства на слабых грунтах, С этой целью движитель снабжен колесами 15, установленными с помощью подпружиненных рычагов 16 с внутренней стороны гусеничного обвода 1 в междугусеничном пространстве. Благодаря sTONfy при .многократном проходе по слабым грунтам расширяется колея от движителя и уменьшается сопротивление движению, что способствует повышению проходимости транспортного средства. 3 з.п. ф-лы, 4 ил.
f5
0ijce.3
