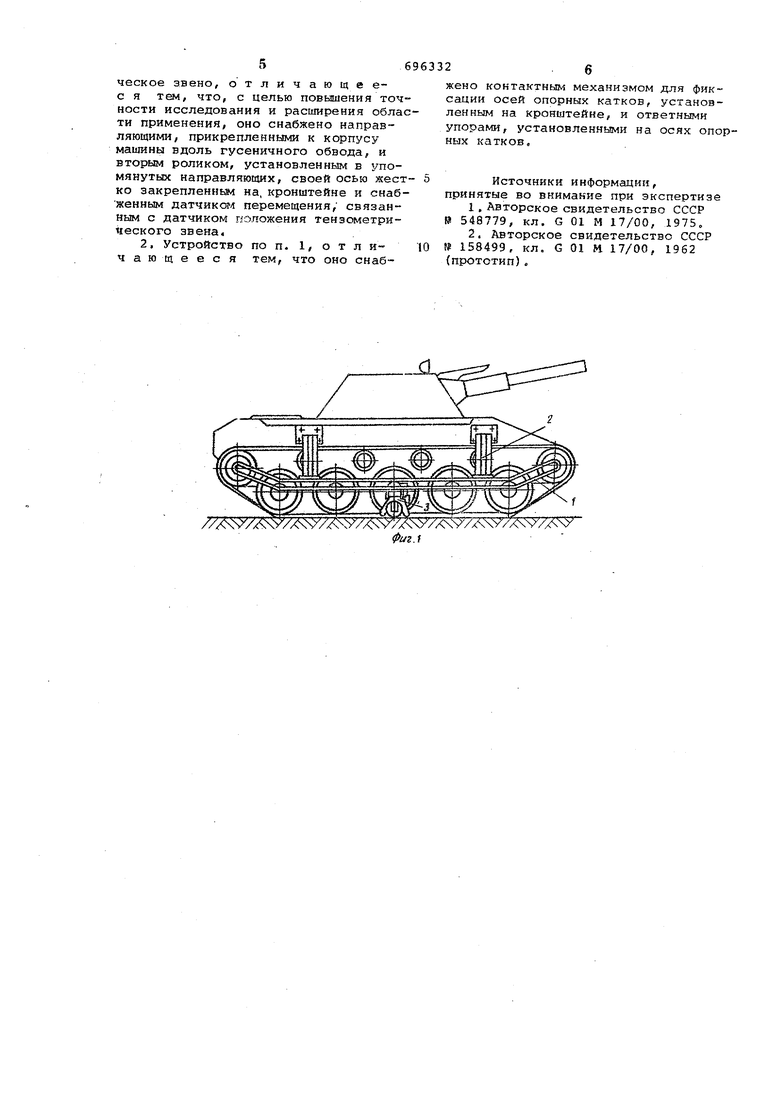
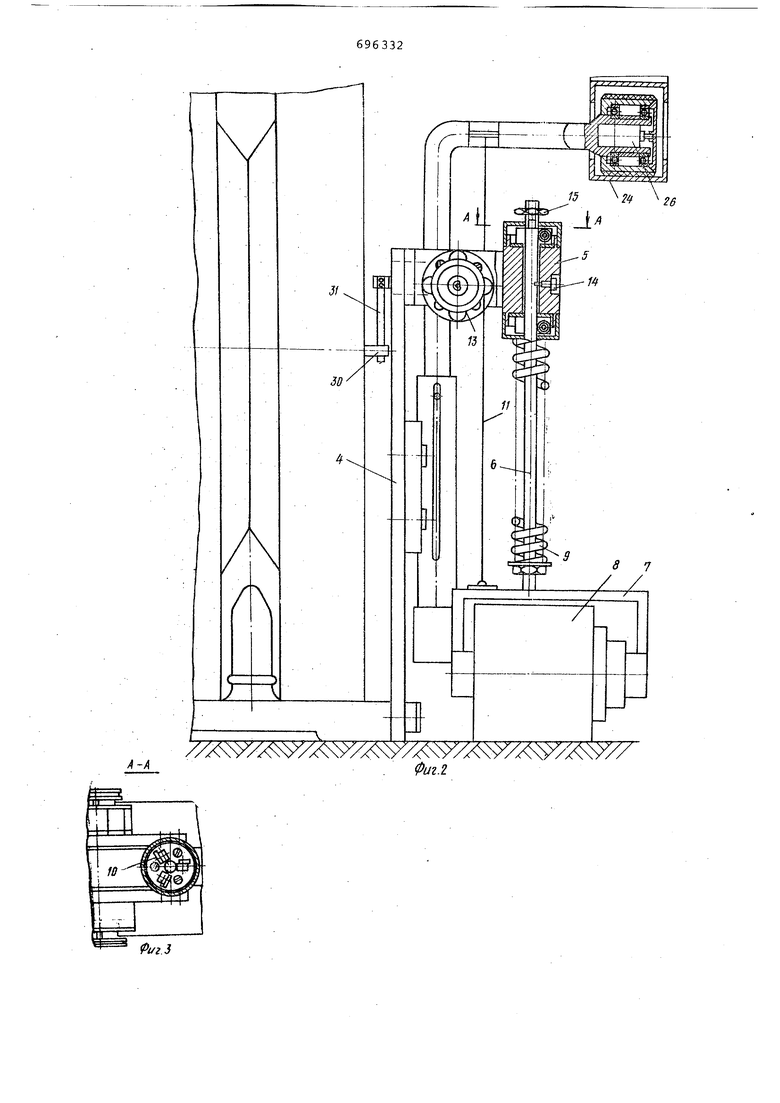
Изобретение относится к области транспортного машиностроения, преим щественно к производству и испытаниям гусеничных -машин, Известен стенд для испытания гусеничных движителей, содержащий гусеничный обвод с опорными катками и передвижные кронштейны для Зс1Мера параметров гусеничного обвода в про цессе его перематывания 1. Этот стенд не позволяет исследовать характер зацепления гусеницы с грунтом, что не дает полной картины кинематики гусеничной машины. Известно также устройство для ис следования кинематики гусеничной ма шины, содержащее гусеничный обвод с тензометрическим звеном, охватывающий опорные катки, кронштейн с подпружиненным роликом, закрепленным в рамке, и датчики положения тензометр ческого звена, установленные на крон штейне, к которому прикреплено жестко тензометричеекое 3BeHoI-2JУказанное устройство позволяет исследовать характер зацепления гусеницы с грунтом. Однако оно не обес печивает получения совокупных данHtjx взаимодействия звена с грунтом на всем протяжении опоры гусеничного движителя на грунт, что снижает область его применения и точность измерений. Целью изобретения является повышение точности исследований и расширение области применеиия устройства. Цель достигается тем, что устройство снабжено направляющими, прикрепленными к корпусу машины вдоль гусеничного обвода, и вторым роликом, установленным в упомянутых направляющих, своей осью жестко закрепленной на кронштейне и снабженннлм датчиком перемещения, связанным с датчиком положения тензометрического звена. Креме того, устройство снабжено контактным механизмом для фиксации осей опорных катков, установленных на кронштейне, и ответными упорами, установленными на осях опорных катков . На фиг. 1 показано устройство, общий вид; на фиг. 2 - устройство, вид спереди; на фиг. 3 - разрез по А-А на фиг. 2; на фиг. 4 - устройство, вид сбоку; на фиг. 5 - подпружиненный ролик, разрез; на фиг. 6 разрез по Б-Б на фиг. 5; на фиг. 7 узел Г на фит-. 5.
3fi9
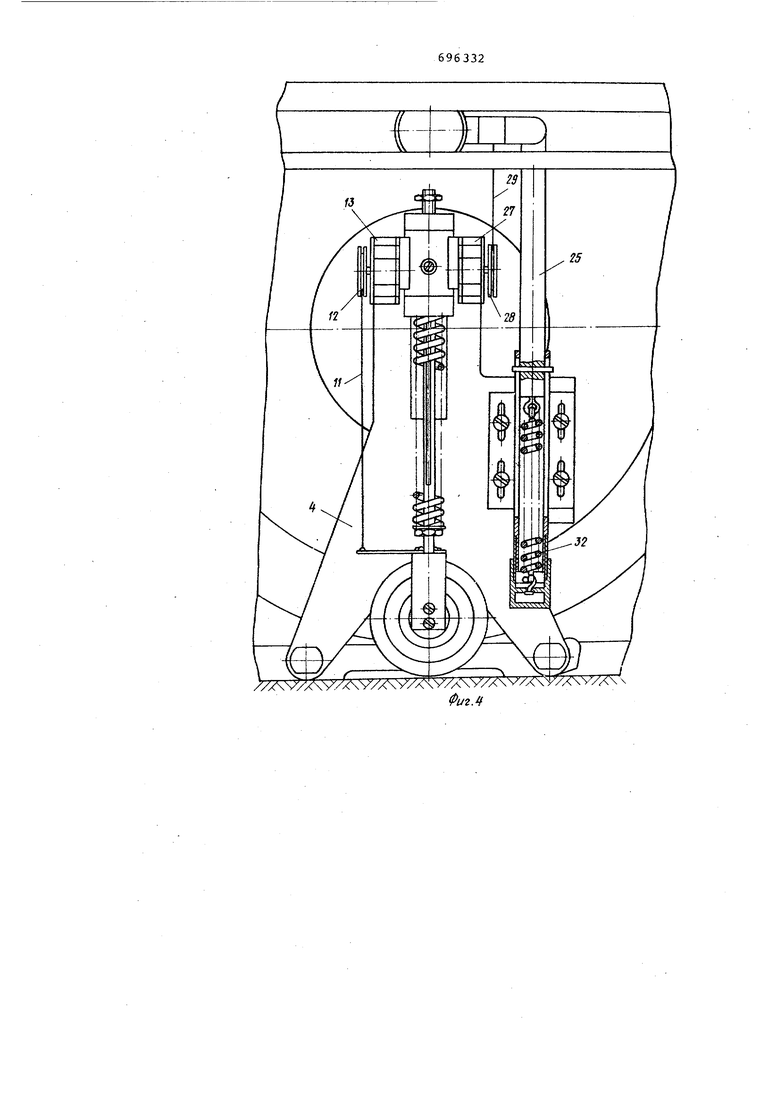
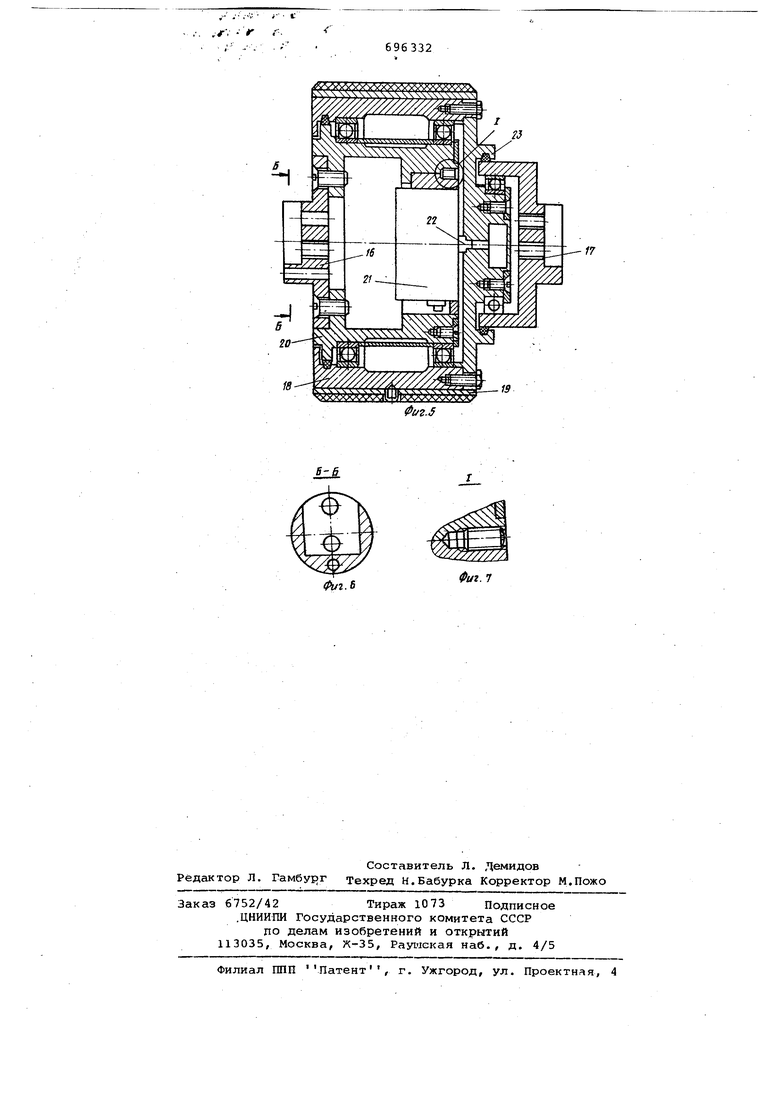
Направляющие 1 прикреплены к корпусу машины с помощью кронштейнов 2. В направляющих установлен механизм 3 для замера кинематики движения трака. Механизм содержит кронштейн 4, который крепится к тенэометрическому траку. На кронштейне 4 установлен в направляющей 5 стержень б, на конце которого Закреплена рамка 7 с po ликом 8, служащим для записи горизонтального смещения трака. Ролик прижимается к грунту:с поиощью пружины 9. Стержень 6 перемещается в двух шарикоподшипниковых опорах 10. Трос 11 закреплен одним концом к рамке 7, другим - к шкиву 12, связанному с полдаижным контактом потенциометра 13. Для предотвращения преворачивания стержня 6 вокруг своей оси на его поверхности выполнен паз, в который входит винт 14. Ограничение хода ролика 8 вниз осуществляется в помощью регулировочной гайки 15 Рамка 7 соединена со стойками 16 и 17 рамки ролика с помощью винтов. Барабан 18 ролика, на который напрессована резиновая дорожка 19, вращается на валу 20 в двух подшипниках. В корпус вала 20 встроен потенциометр 21, ползунок 22 которого связан .через промежуточный диск 23 с барабаном ролика. Для определения положения тензсялетрического трака в гусеничном обводе, а также для замера относительной величины буксованиягусеничного движителя устройство сиажено дополнительным роликом 24, установленньвч своей осью на кронштейне 4 с помощью ведущего стержня 25 и винтов. РОЛИК 24 снабжен потенциометром 26, Регистрация изменения длины ведущего стержня 25 осуществляется реостатом 27, ксфпус которого закреплен на кронштейне 4, а ползунок с по мощью шкива 28 и троса 29 связан с роляксям 24. Для фиксации прохождения оси опорного катка над тензометрическим траксии на все оси опорных катков установлены штыри 30, а на кроштейне4 установлен прарьгоатель 31. Пружина 32 служит для эластичного закрепления ролика 24 на кронштейие 4.
Устройство работает следующим образом. При движении гусеничной машины тензометрический трак, перемещаясь по периметру гусеничного обвода, входит в контакт с опорной поверхностью ;при этом ролик 8 прижимавтся к опорной поверхности пружиной 9 и при скольжении трака перемещается вместе с ними в горизон альнсм направлении параллельно колее прокладываемой гусеничной машиной..При скольжении трака относительно опорной поверхности ролик 8 проворачивается на подшипниках вокруг вала 20 в ту или другую сторону. Ползунок 22 потенциометра
21 смещается относительно своего первоначального положения, что приводит к разбалансу моста и фиксируется на ленте осциллографа. Глубина погружения трака и изменение глубины погружения при прохождении по нему опорны катков измеряются потенциометром 13. Так как трак движется по колее, а ролик по недеформированному грунту, то пружина 9 сжимается на величину дефомации грунта (глубину колеи), трос 1 освобождается и шкив 12 потенциометра 1 3 под действием пружины, встроенной в потенциометр, проворачивается, что приводит к разбалансу моста, и фиксируется на ленте осциллографа. При движении гусеничной машины ролик 24 катится по направляющим 1, устаноленный внутри ролика потенциометр замеряет расстояние, проходимое ма-шиной отноЬительно трака. Следователно, с помощью ролика 8 можно замерять абсолютную величину скольжения трака относительно грунта, ас псмощью ролика 24 - абсолютн5лю величину, проходимую корпусом гусеничной машины на длине опорной поверхности или на расстояний ji/кжду опорными катками, для чего и установлен на кронштене 4 пре маватель 31. Определение положения тенэометрического трака в периметре гусени1ного обвода осущестляется с noMoas.0 ролика 24 и реостата 27. Потенциометр 26, встроенкь7й в ролик 24, замеряет угол поворота кронштейна 4, а реостат 27 определяет расстояние от терзотрака до направляющих 1. Зная угол поворота и расстояние до направляющих 1, можно определить координату тензометрического трака по всему периметру гусеничного обвода, что позволяет построить эпюру сил. Действующих на. тензотрак, как в контакте с опорной поверхностью гусеничного движителя, так и вне контакта.
Применение данного устройства с большой точностью обеспечивает постоянное измерение кинематики движения тензотрака по всему периметру цепи гусеничного движителя, что необходимо при исследовании проходимости и быстроходности движения гусеничных машин, с целью разработки и создания более совершенной конструкции гусеничного движителя.
Формула изобретения
1, Устройство для исследования кинематики гусеничной машины, содержащее гусеничный обвод с тензеадетрическим звеном, охватывающий опорные катки, кронштейн с подпружиненным роликом, закрепленным в рамке, и датчики положения тензсметрического звена, установленные на кронштейне, к которому прикреплено жестко тенэометрическое звено, отличающеес я тем, что, с целью повышения точности исследования и расширения области применения, оно снабжено направляющими, прикрепленными к корпусу машины вдоль гусеничного обвола, и вторым роликом, установленным в упомянутых направляющих, своей осью жестко закрепленнЕ на, кронштейне и снабженнЕДм датчиког/ перемещения, связанным с датчиком положения тенэометрического эвена4
2, Устройство по п. 1, о т л И
чающееся тем, что оно снабжено контактным механизмом для фиксации осей опорных катков, установленным на кронштейне, и ответными упорами, установленными на осях опорных катков.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР и 548779, кл. G 01 М 17/00, 1975о
2,Авторское свидетельство СССР № 158499, кл. G 01 И 17/00, 1962 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования кинематики гусеничной машины | 1983 |
|
SU1129511A2 |
| Устройство для замера реакций грунта и силы растяжения в гусеничной цепи при движении гусеничной машины | 1989 |
|
SU1651108A1 |
| Устройство для съема электрических сигналов с тензометрического звена гусеничного движителя транспортного средства | 1987 |
|
SU1474505A1 |
| УСТРОЙСТВО ДЛЯ САМОВЫТАСКИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ГУСЕНИЧНЫМ ДВИЖИТЕЛЕМ | 1993 |
|
RU2037447C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| Тензотрак | 1987 |
|
SU1437725A1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ПРОХОДИМОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 1993 |
|
RU2037446C1 |
| Устройство для исследования взаимодействия гусеничного движителя с грунтом | 1973 |
|
SU548779A1 |
| Устройство для замера реакций грунта при движении гусеничной машины | 1981 |
|
SU949385A1 |
| Гусеничный движитель | 1990 |
|
SU1717465A1 |
фигл У/..
РигЗ
XxvOv x V/v //ч ч
/Я
696332
W
Фиг.5
Фиг.
Фиг. 7
