(Л
с
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2039929C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1619027A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2035692C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2189009C2 |
| Ультразвуковой измерительный преобразователь параметров движения | 1988 |
|
SU1613855A1 |
Изобретение относится к измерительной технике и может быть использовано для измерения параметров линейного перемещения объекта. Цель изобретения - повышение точности измерения линейных перемещений. Устройство содержит О-образный звукопровод, на прямой и обратной ветвях которого размещены элементы записи и считывания. Элемент записи возбуждает сигнал, который циркулирует в звукопроводе и регистрируется элементом считывания. О перемещении судят по коду, определяемому разностью времен распространения сигнала против часовой стрелки и по часовой стрелке. Выходной код равен сумме указанных кодов за несколько периодов циркуляции. 2 з.п. ф-лы, 4 ил.
Изобретение относится к измерительной технике, а именно к преобразователям информации, и может быть использовано в робототехнических системах и комплексах дпя измерения параметров линейного перемещения
объекта.
Целью изобретения является повышение точности измерения линейных перемещений.
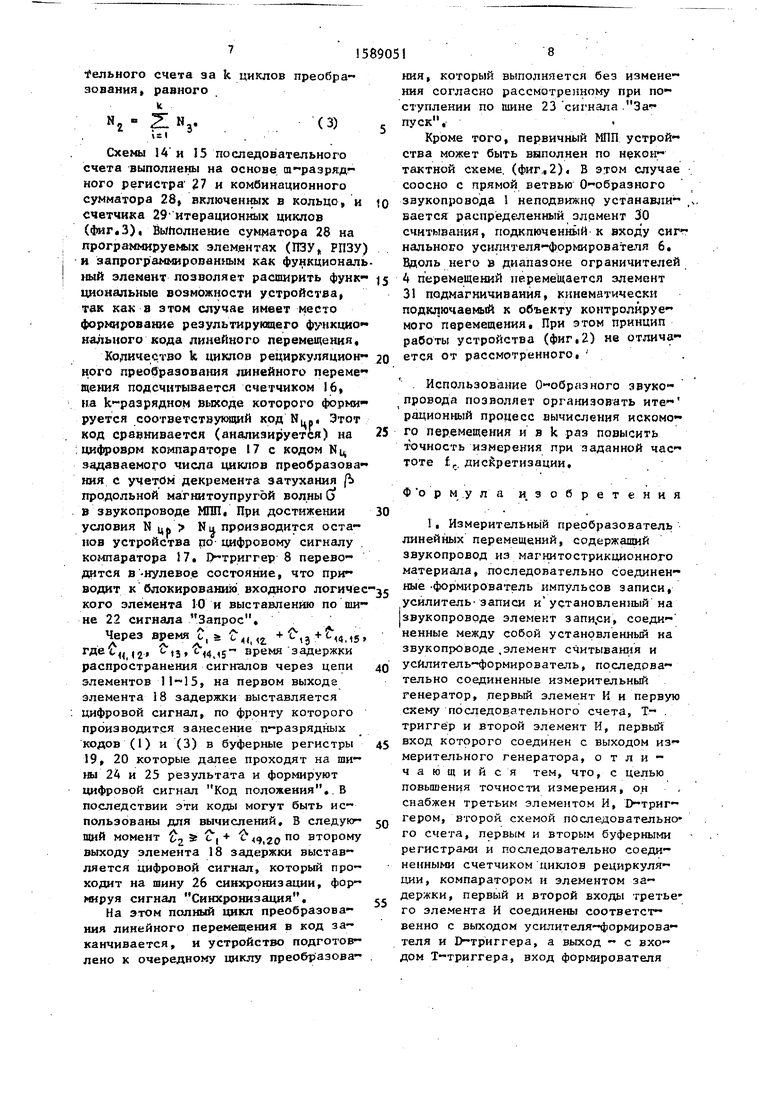
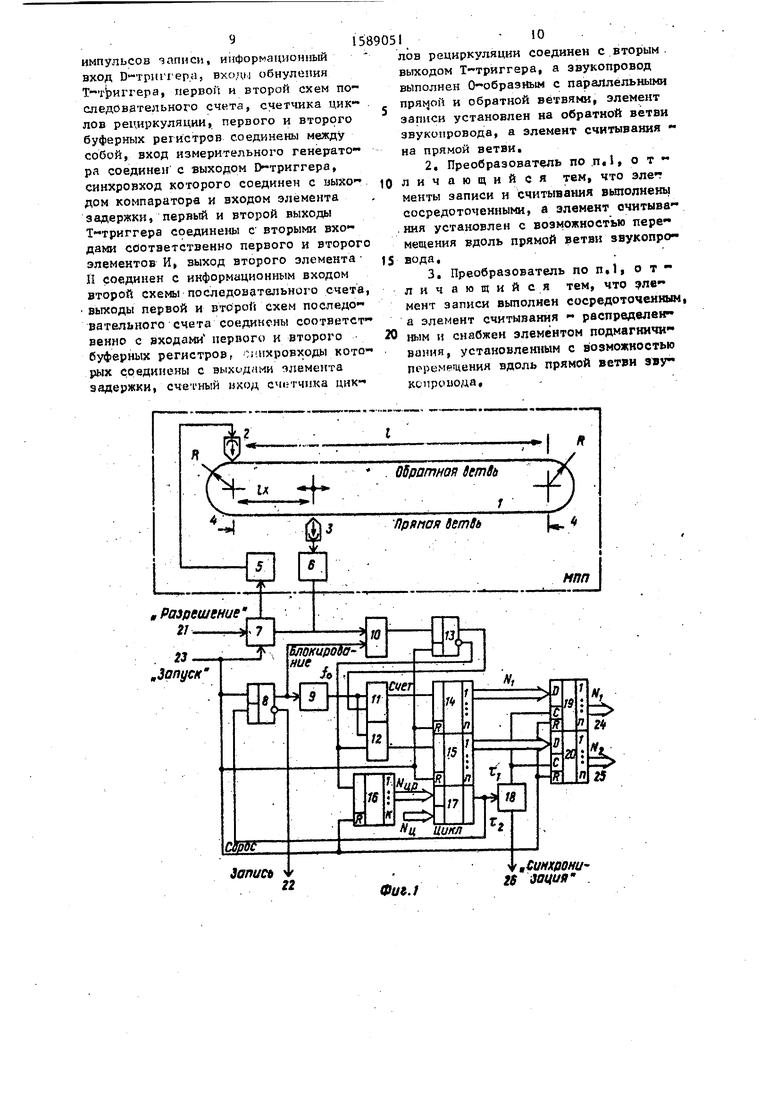
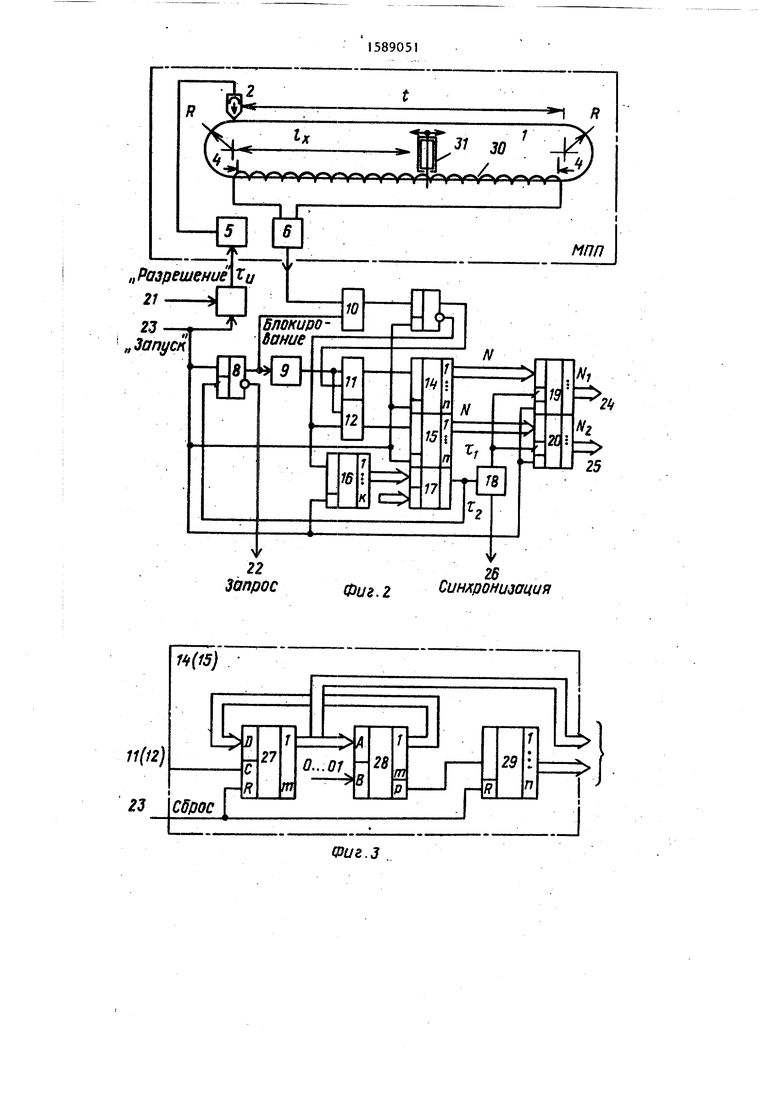
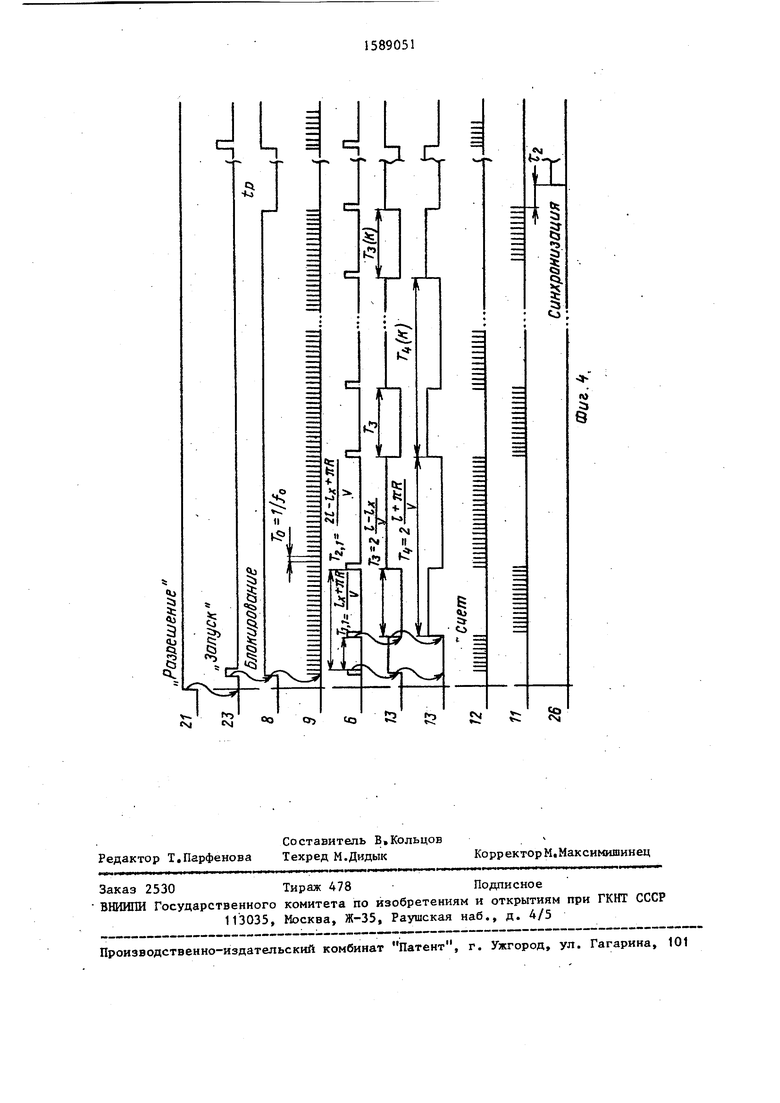
На фиг.1 и 2 приведены схемы измерительного преобразователя линейных перемещений при разном исполнении его первичного магнитострикцион- ного преобразователя перемещений; на фиг.З - пример выполнения схем последовательного счета измерительного преобразователя линейных перемещений; на фиг.4 - временные диаграммы работы устройства.
Измерительный преобразователь линейных перемещений содержит первичный магнитострикционный преобразователь линейных перемещений (МПП), состоящий из 0-образного звукопровода 1 из магнитострикционного материала, неподвижного сосредоточенного элемента 2 записи, подвижного сосредоточенного элемента 3 считывания,двух ограничителей 4 перемещений, усилителя 5 записи и сигнального усилителя-формирователя 6, а также формирователь 7 импульсов записи, D-триггер 8, измерительный генератор 9, три элемента И 10-12, Т-триггер 13, две схемы 14 и 1.5 последовательного счета, счетчик 16 ЦИКЛОВ рециркуляции, цифровой компаратор 17, элемент В задержки, два буферных регистра 19 и . 20, шину 21 управления, шину 22 заУ1
проса, шину 23 запуска,, первую и вторую шину 24 и 25 результата и шину 26 синхронизации,
На концах прямой ветви О- Образно- га звукопровода 1 закр«;плены ограни читали А перемещений, между которыми перемещается сосредоточенный элемент 2 записи, кинематически подсоединяемый к объекту контролируемого пе ремещения, его вывод подсоединен к выходу усилителя 5 заш1си, В начгше обратной ветви Сообразного звукопровода 1 закреплен сосредоточенный элемент 3 считывания, вывод которого подсоединен к входу сигнального усилителя-формирователя 6 МПГ, Вход усилителя 5 записи соединен с выходом формирователя 7 импульсов записиj, его вход управления подключен к ши- не 21 управления, а информационный вход подключен к шине 23 запуска и соединен с нулевыми входами Т-триггера 13, первой и второй схем 14 и 15 последовательного счета, счетчика 16 циклов рециркуляции, первого и второго буферных регистров 1-9, 20 и единичным входом D-триггера 8, Один его выход подключен к шине 22 запроса, а второй выход соединен с входом из- мерительного генератора 9 и одним входом первого элемента И 10, Другой его вход соединен с выходом сигнального усилителя-формирователя 6 МПП, а выход соединен со счетным входом Т-триггера 13 Прямой выход Т-тригге- ра соединен с одним входом второго элемента И 11, а инверсный вьгход соединен с одним входом третьего элемента И 12 и счетным входом счетчика 16 циклов рециркуляции. Другие входы элементов И 11 и 12 объединены и соединены с выходом измерительного генератора 9, Их выходы соединены со счетными входами соответственно пер- вой и второй схем 14 и 15 последовательного счета, п-разрядные выходы которых подключены к первой и второй шинам 24 и 25 результата соответственно через первый и второй буферные регистры 19 и 20, Их синхровходы объединены и соединены с одним вько- дом элемента 18 задержки, другой бго выход подключен к шине 26 си:нхро низации. Вход элемента 18 задержки соединен с синхровходом D-триггера 8 и выходом компаратора 17, входы которого подсоединены к выходам счетчика 16 циклов рециркуляции Схемь1 14 и 15 последовательного счета выполнены на основе т-разрядного регистра 27, комбинационного сумматора 28 и счетчика 29 итерационных циклов, .Кроме того, первичный магнито - стрикционный преобразователь линейных перемещений может быть выполнен по неконтактной кинематической схеме с использованием распределенного элемента 30 считывания с подвижным элементом 31 подмагничивания, который кинематически подключен к объекту контролируемого перемещения и может перемещаться между ограничителями 4 перемещений вдоль элемента 30, соосно установленного на прямой ветви 0-образного звукопровода 1, ды распределенного элемента 30 счить вания подсоединены к входу сигнального усилителя-формирователя 6 МПП,
Устройство работает следующим образом.
Первоначально устройство устанавливается в „исходное состояние. При подаче по шине 2 управления цифрового сигнала Разрешение произво- дится перевод устройства в режим работы. По шине 22 запроса выставляется цифровой сигнал Запрос, в ответ на который через время tp реакции пользователь выставляет по шине 23 запуска цифровой импульсньй сигнал Запуск, По этому сигналу производится установка в нулевое состояние Т-триггера 13, схем 14 и 15 последовтельного счета, счетчика 16 циклов рециркуляции, буферных регистров 19 и 20 перевод D-триггера 8 в единич- .ное состояние и запуск формирователя 7 импульсов записи,
В результате по шине 22 запроса снимается сигнал Запрос, Одновременно производится разблокирование входа логического элемента И 10 и запуск измерительного генератора 9, который формирует цифровую измерительную шкалу с частотой дискретизации f J, i/Tg, Затем импульсы проходят на счетный вход второй схемь; 15 последовательного счета через от- крытьй элемент И 12, Счетчик 16 циклов рециркуляции отмечает начало пер вого цикла преобразования. Это состояние сохраняется до момента переключения Т-триггера 13 в противоположное (единичное) состояние.
На выходе формирователя 7 импульсов записи формируется прямоугольный видеоимпульс калиброванной длительности С„ f промодулированнь1й несущей частотой f j,jg , который проходит на усилитель 5 записи НЛП, вырабатывающий токовый сигнал записи. Этот сигнал возбуждает сосредоточенный элемент 2 записи, под которым в О-об- разном магнитострикционном звукопро- воде 1 возбуждается модулированная продольная магнитоупругая волна, распространяющаяся в обе стороны с фазовой скоростью V.
Одна магнитоупругая волна С распространяется влево (по фиг.О .по обратной ветви звукопровода 1 и через время
, jj ij:jL
М V
где 1 у - искомое линейное перемещение объекта;
R - радиус закругления звукопровода,
проходит в прямую ветвь звукопровода и достигает подвижный сосредоточенный элемент 3 считывания., индуцирует на его выходе модулированный импульс напряжения, который проходит на вход сигнального усилителя-формирователя 6 и преобразуется в прямоугольный видеоимпульс считывания. Этот импульс далее проходит на счетный вход Т-триггера 13 через открытый элемент И 10 и переключает его в единичное состояние.
Это приводит к блокированию входа элемента И 12, через который с этого момента запрещено прохождение опорных сигналов измерительного генератора 9 на счетный вход второй схемы 15 последовательного счета, и разблокированию входа другого элемента И 11. Через элемент И 11 будут проходить счетные импульсы измеритель- .ного генератора 9 на счетный вход первой схемы 14 последовательного счета до момента очередного переклкг- чения Т-триггера 13. Вторая схема 15 последовательного счета в данный момент запоминает код промежуточного значения искомого линейного перемещения, равный
N,,, - Т,., -fo Распространяясь далее по прямой ветви эвукопровода 1 (против часовой
10
15
20
стрелки), продольная магнитоупругая волна + 0 достигает вторично подвижный элемент 3 считывания через время рециркуляционного цикла, равное
.„.i-l-ts,
где 1 - длина прямой и обратной ветвей 6-образного звукопровода,
и вновь наводит на выходе элемента 3 считывания модулированный импульс напряжения, который преобразуется в прямоугольный видеоимпульс считыва - ния усилителем-формирователем б, и переключает Т-триггер 13 в соответствующее логическое состояние согласно временной диаграмме (ф«г,4). Интервал 1 рециркуляции импульсов является постоянной величиной, цифровой эквивалент которого., равен
N,
Тл f, i - 1, 2,
I
k.
„1 -4 о 5 где i - текущее значение рециркуляционного цикла.
За (k-1) циклов преобразования во второй схеме 15 последовательного счета накапливается следующее коли- Q честно импульсов
К-«
N N,.,
N
.«
(О
Г Другая магнитоупругая волна - о
распространяется вправо по обратной ветви звукопровода 1 (по фиг,1), достигает неподвижный элемент 3 считывания через время
71 - IV +
т,
2,1
IK
v
+ к R
5
0
и наводит на его выходе модулированный импульс напряжения, который преобразуется в прямоугольный видеоимпульс считывания и проходит на счетный вход Т-триггера 13 и переключает его. Это приводит к выключению элемента И 11, и первая схема 14 последовательного счета хранит разностный ход текущего значения, равный /
(2)
N.
(Т2..-Тм.)«о 2
1)(
Эта продольная магнитоупругая волна С обращается по 0-образному зву- копроводу I МПП по часовой стрелке с временем цикла Тц, что вызывает формирование разностного кода (2) на выходах первой схемы 14 последова 1589051
дельного счета за k циклов преобразования, равного
2 Н,.(3) 5
Cxe(Ы 14 и 15 по ел «гд о нательного счета выполнены на основе ш разряд - кого регистра 27 и комбинационного сумматора 28, включенных в кольцо, и to счетчика 29 итерационных циклов (). Выполнение суьц атора 28 на программируемых элементах (ПЗУ РПЗУ) и запрограммированным КАК функциональ- ный элемент позволяет расширить функ- J5 циональные возможности устройства, так как в этом случае имеет место формирование результирующего функцио - кальногр кода линейного перемещения,
Кодичество k циклов рециркуляцион- 20 ноге преоЗразова){ия линейного переме подсчитывается счетчиком 16, на k-разрядном выходе которого формируется соответствующий код Nup, Этот
код срзвкивается (анализируется) на цифроврм компараторе 17 с кодам Кц задаваемого числа циклов преобразова кия с учетом декремента затухания (Ь продольной магиитоупругой волны GI в звукопроводе МШ, При достижении условия N ЦК Nu производится останов устройства цо цифровому сигналу . компаратора J7. О триггер 8 перево- дится в-нулево.е состояние, что при
25
8
НИН, который выполняется без изменения согласно рассмотренному при поступлении по шине 23 сигнала .Запуск,
Кроме того, первичный МПП устройства может быть выполнен по тактной схеме, (фиг,,2). В этом случа соосно с прямой ветвью 0-образного знукопровода 1 неподвижнр устанавли вается распределенный элемент 30 считывания, подкпюченнь1Й к входу сн нального усилителя-формирователя 6, Вдоль него 33 диапазоне ограничителе 4 перемещений перемещается элемент 3 подмагничивания, кинематически подключаемый к объекту контролируемого перемещения. При этом принцип работы устройства (фиг,2) не отлича ется от рассмотренного,
. Использование О-образного эвуко- провода позволяет организовать ите рационный процесс вычисления искомо го перемещения и в k раз повысить тЪчность измерения при заданной час тоте tf, дисйретизации.
Ф о р м у л а и 3 о б
р е т е и и
30
1, Измерительный преобразователь линейных перемещений, содержащий звукопровод из магнитострикционного материала, последовательно соединен
водит к блокировани входного логичес-35 « е-формирователь импульсов записи.
кого элемента 10 и выставлению по шине 22 сигнала Запрос,
Через время С, а С,,,, + ,3 o.s гдеС ,2 время задержки
усилитель записи и установлен1а1й на звукопроводе элемент запи,си, соединенные между собой установленный на звукопроводе .элемент считывания и усилитель-формирователь, последрва- тельно соединенные измерительный генератор, первый элемент И н первую схему последовательного счета. Т- . триггер и второй элемент И, первый вход которого соединен с выходом измерительного генератора, отличающийся тем, что, с целью повышения точности измерения, он снабжен третьим элементом И, 1 триг- гером, второй схемой последовательно го счета, первым и вторым буферными регистрами и последовательно соединенными счетчиком циклов рециркуляции, компаратором и элементом задержки, первый и второй входы третье го элемента И соединены соответственно с выходом усилителя-формирователя и 1 триггера, а выход - с входом Т-триггера, вход формирователя
распространения сигналов через цепи элементов , на первом выходе элемента 18 задержки выставляется цифровой сигнал, по фронту которого производится занесение п-разрядных кодов (1) и (3) в буферные регистры 19, 20 которые далее проходят на ши- №1 24 и 25 результата и формируют цифровой сигнал Код положения,.В последствии эти коды могут быть использованы для вычислений, В следукг- щнй момент т S с, D 9,2о по второму выходу элемента 18 задефжки выставляется цифровой сигнал, который проходит на шину 26 синхронизации, фор- пируя сигнал Синхронизация,
На этом полный цикл преобразования линейного перемещения в код заканчивается, и устройство подготовлено к очередному циклу преобразова
8
НИН, который выполняется без изменения согласно рассмотренному при поступлении по шине 23 сигнала .Запуск,
Кроме того, первичный МПП устройства может быть выполнен по тактной схеме, (фиг,,2). В этом случае соосно с прямой ветвью 0-образного знукопровода 1 неподвижнр устанавли- ,. вается распределенный элемент 30 считывания, подкпюченнь1Й к входу снгг нального усилителя-формирователя 6, Вдоль него 33 диапазоне ограничителей 4 перемещений перемещается элемент 3 подмагничивания, кинематически подключаемый к объекту контролируемого перемещения. При этом принцип работы устройства (фиг,2) не отличается от рассмотренного, .
. Использование О-образного эвуко- провода позволяет организовать рационный процесс вычисления искомого перемещения и в k раз повысить тЪчность измерения при заданной частоте tf, дисйретизации.
Ф о р м у л а и 3 о б
р е т е и и я
1, Измерительный преобразователь линейных перемещений, содержащий звукопровод из магнитострикционного материала, последовательно соединен« е-формирователь импульсов записи.
усилитель записи и установлен1а1й на звукопроводе элемент запи,си, соеди ненные между собой установленный на звукопроводе .элемент считывания и усилитель-формирователь, последрва- тельно соединенные измерительный генератор, первый элемент И н первую схему последовательного счета. Т- . триггер и второй элемент И, первый вход которого соединен с выходом измерительного генератора, отличающийся тем, что, с целью повышения точности измерения, он снабжен третьим элементом И, 1 триг- гером, второй схемой последовательно го счета, первым и вторым буферными регистрами и последовательно соединенными счетчиком циклов рециркуляции, компаратором и элементом задержки, первый и второй входы третье го элемента И соединены соответственно с выходом усилителя-формирователя и 1 триггера, а выход - с входом Т-триггера, вход формирователя
импульсов записи, информационный вход П-тригх-ер.а, BXO V.J обнуления Т-т иггера, первой и второй схем последовательного счета, счетчика цик лов рециркуляции, первого и второго буферных регистров соединены между собой, вход измерительного генератора соединен с выходом D-триггера, синхровход которого соединен с выхо дом компаратора и входом элемента задержки, первый и второй выходы Т«триггера соединены с вторыми входами соответственно первого и второго элементов И, выход второго элемента И соединен с информационным входом второй схемы последовательного счета, . выходы первой и второй схем последовательного счета соединены соответственно с входами первого и второго буферных регистров, сиихровходы которых соединены с выходами элемента задержки, счетный нход сч л чика цик -4 itiJ
„Разрешение
гг.
23
22
9051- 10
лов рециркуляции соединен с вторым . выходом Т-триггера, а эвукопровод выполнен 0 образным с параллельными пряьзон и обратной ветвями, элемент записи установлен на обратной ветви звукопровода, а элемент считывания - на прямой ветви,
15
Обратного Semtti
Припоя bsmSb
I
Him
5
2S
Фиг.1
t
ение
Влониро- бание
10
дан
7/
/2
16
22
Запрос
Фиг. 2
Q3UZ. 3
1 /
j 4 в / ITv
мпп
№
N
N
19
2L
N,
2ff
NZ
17
Г8
25
f
26
Синхронизация
tvj
«30
03
to
to
M
| Магнитострикционный дифференциальный преобразователь перемещений | 1978 |
|
SU747812A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
