Изобретение относится к транспортным комплексам, включающим в себя многозвенное безрельсовое наземное колесное транспортное средство и проезжую часть для этого транспортного средства, и касается управления колесами ведомых звеньев транспортного средства при движении по упомянутой проезжей части.
Управление положением ведомых звеньев (тележек, вагонов) безрельсовых колесных транспортных средств, например, автопоездов, представляет большие трудности. Оно требует принятия специальных мер для того, чтобы все звенья транспортного средства при движении вписывались в определенный коридор, отведенный транспортному средству на проезжей части, например, на шоссе или на улице города, и не задевали объезжаемые препятствия, например, автомобили, стоящие у обочины дороги, или ремонтируемые участки пути. Для обеспечения надлежащего поворота многозвенного транспортного средства на кривых участках пути при движении его по трассе со сложным профилем может осуществляться ручное управление рулевым приводом колес ведомого звена, на котором для этого располагают кабину для второго водителя. Однако использование труда второго водителя увеличивает стоимость перевозок и не позволяет развить транспортному средству большую скорость движения.
Известен транспортный комплекс, включающий проезжую часть и многозвенное транспортное средство, состоящее из ведущего звена и связанного с ним соединительным элементом ведомого звена, на котором установлен сервомеханизм для поворота управляемых колес, подключенный к блоку управления, получающему с задержкой сигнал с ведущего звена [1] Однако в этом транспортном комплексе не обеспечивается высокая точность следования ведомого звена по траектории ведущего звена.
Известен способ управления многозвенным транспортным средством, заключающийся в том, что измеряют углы поворота звеньев автопоезда относительно соединительного элемента, сравнивают между собой эти углы по знаку и поворачивают колеса прицепного звена на угол, вычисляемый по расчетным формулам [2] Однако при таком способе управления трудно обеспечить надлежащее совпадение траекторий движения ведущего и ведомого звеньев автопоезда при его маневрировании, когда ему приходится объезжать случайные препятствия, возникшие на дороге.
Известен транспортный комплекс, содержащий многозвенное транспортное средство, состоящее из ведущего звена и сочлененного с ним ведомого звена, на ведущем из которых размещена записывающая магнитная головка, а на ведомом установлен сервомеханизм для управления его колесами, считывающую магнитную головку, соединенную с устройством управления сервомеханизмом, магнитный носитель информации и проезжую часть [3] Носитель информации в этом транспортном комплексе выполнен в виде магнитного барабана, соединенного синхронным приводом с управляемыми колесами ведомого звена, при этом записывающая магнитная головка ориентирована в сторону упомянутого барабана и подключена к датчику угла поворота управляемых колес ведущего звена. Способ управления многозвенным транспортным средством в этом комплексе заключается в изменении посредством рулевого механизма положения колес ведущего звена, магнитной записи информации о текущем положении на проезжей части последнего и считывании указанной информации с последующим воздействием на колеса ведомого звена, при этом в качестве записываемой используют информацию, характеризующую текущее положение управляемых колес ведущего звена относительного него самого, а запись упомянутой информации осуществляют на магнитный барабан, расположенный на самом транспортном средстве и приводимый во вращение от управляемых колес ведомого звена. Однако в условиях эксплуатации возможно появление ошибок в определении пути запаздывания подачи сигнала на считывающую головку. Эти ошибки возникают из-за пробуксовки колес, заноса на повороте, бокового увода эластичных шин и других случайных факторов. Из-за этого может происходить значительное отклонение траектории ведомого звена от траектории ведущего, что снижает безопасность движения транспортного средства.
Задачей, решаемой изобретением, является повышение точности следования ведомого звена транспортного средства по траектории движении ведущего звена при маневрировании транспортного средства на проезжей части.
Повышение точности следования ведомого звена по траектории движения ведущего звена необходимо для того, чтобы, например, в городских условиях многозвенное транспортное средство могло безопасно объезжать автомобили, стоящие у тротуара или на обочине дороги, без столкновения с ними ведомых звеньев, в особенности, когда их несколько, а также могло безопасно объезжать участки пути, на которых производится ремонт дорожного покрытия, без заезда на них колес ведомых звеньев.
Для решения указанной задачи в транспортном комплексе, содержащем многозвенное транспортное средство, состоящее из ведущего звена и сочлененного с ним по меньшей мере одного ведомого звена, на ведущем из которых размещена записывающая магнитная головка, а на ведомом установлен сервомеханизм для управления его колесами, считывающую магнитную головку, соединенную с устройством управления сервомеханизмом, магнитный носитель информации и проезжую часть, носитель информации образован проезжей частью, выполненной с магнитным веществом по всей ее ширине, при этом записывающая магнитная головка ориентирована в сторону проезжей части, а ведомое звено снабжено дополнительной считывающей магнитной головкой, соединенной с устройством управления сервомеханизмом, при этом обе считывающие магнитные головки расположены на ведомом звене с возможностью одновременного взаимодействия с носителем информации.
При наличии в проезжей части магнитного вещества, образующего носитель информации при записи на проезжую часть с помощью магнитной головки сведений о нахождении на ней ведущего звена многозвенного транспортного средства, получается своеобразная непрерывная, невидимая "разметка" произвольной трассы движения ведущего звена, на основании которой с помощью считывающих магнитных головок производится ориентирование на проезжей части ведомых звеньев транспортного средства с целью обеспечения их следования точно по траектории движения ведущего звена.
Транспортный комплекс может быть снабжен стирающими магнитными головками, одна из которых размещена перед записывающей магнитной головкой на ведущем звене, а другая после считывающих магнитных головок на ведомом звене. Это обеспечивает воспроизведение на ведомом звене только той информации, которая записана на проезжую часть магнитной головкой ведущего звена этого же транспортного средства и исключает помехи в управлении ведомыми звеньями, которые могут возникнуть от случайно оставленной на проезжей части записи информации о движении ведущих звеньев других транспортных средств.
Проезжая часть может быть выполнена с покрытием, включающим в себя равномерно распределенные частицы упомянутого магнитного вещества.
В решающем упомянутую задачу способе управления многозвенным транспортным средством, заключающемся в изменении посредством рулевого механизма положения колес ведущего звена, магнитной записи информации о текущем положении на проезжей части последнего и считывании указанной информации с последующим воздействием на колеса ведомого звена, в качестве записываемой используют информацию, характеризующую текущее положение фиксированной точки ведущего звена на проезжей части, запись упомянутой информации осуществляют на проезжую часть, выполненную с магнитным веществом, а считывание в фиксированных точках ведомого звена.
Перед записью на проезжую часть информации о положении ведущего звена транспортного средства с последней стирают ранее записанную информацию путем размагничивания. Это позволяет исключить нежелательное влияние на управление данным транспортным средством случайно оставленной записи на проезжей части информации о прохождении других, ранее следовавших транспортных средств.
Записанную на проезжую часть информацию о положении ведущего звена транспортного средства стирают после ее считывания на последнем ведомом звене транспортного средства. Это действие исключает возможность помехи в управлении транспортными средствами, следующими после данного транспортного средства.
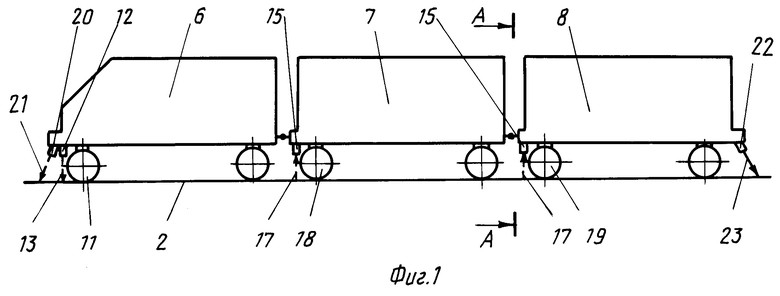
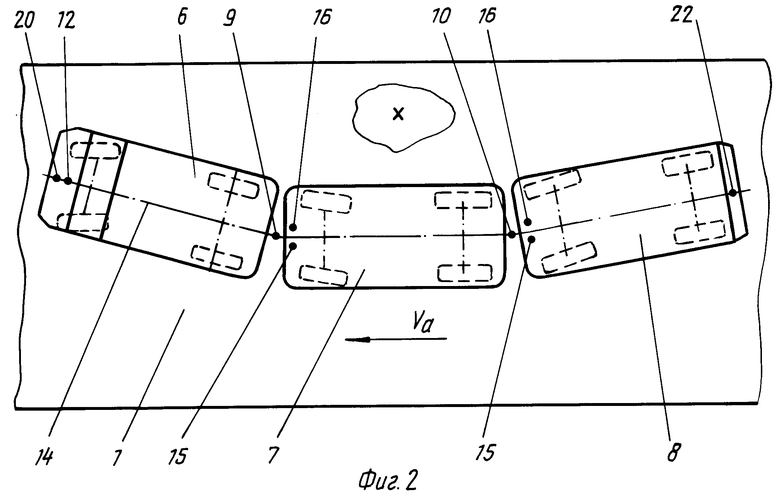
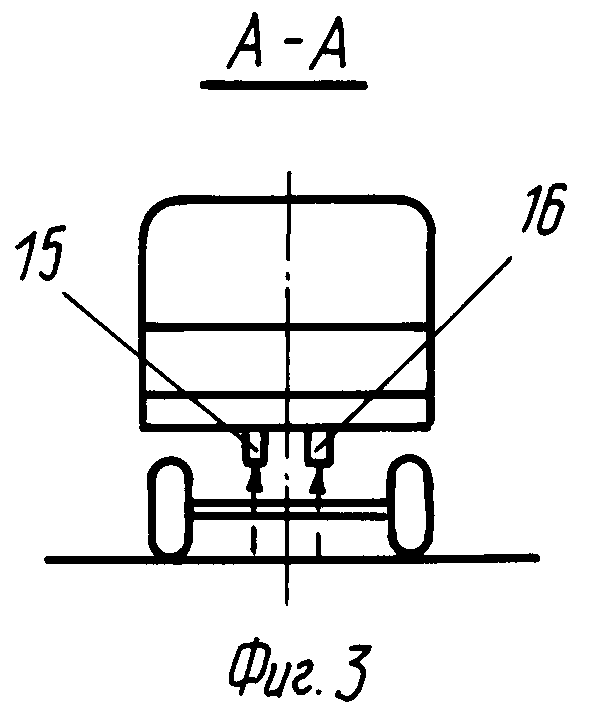
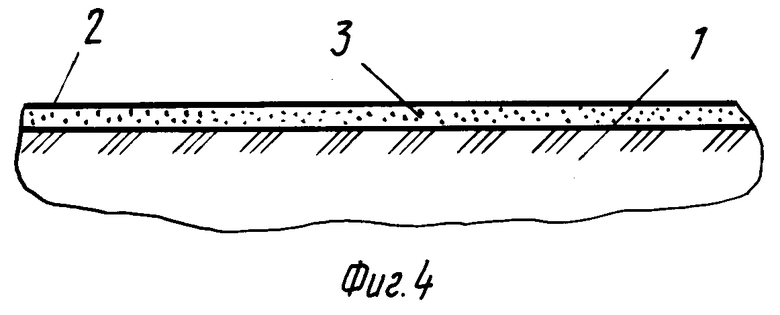
На фиг. 1 изображен многозвенный автопоезд транспортного комплекса; на фиг. 2 вид сверху на маневрирующий автопоезд; на фиг.3 разрез по А-А на фиг. 1; на фиг.4 проезжая часть транспортного комплекса с расположенным в дорожном покрытии магнитным порошком; на фиг. 5 проезжая часть транспортного комплекса, на которую нанесена краска с магнитными частицами.
Транспортный комплекс включает проезжую часть 1 и расположенное на ней многозвенное пассажирское или грузовое колесное транспортное средство, например автопоезд, либо внутрицеховое многозвенное транспортное средство для перевозки грузов. При использовании транспортного средства в городе проезжей частью является улица, при использовании его для междугородной перевозки проезжей частью является дорога, при использовании его внутри цеха предприятия проезжей частью является пол цеха. Проезжая часть 1 в своем дорожном покрытии 2 (фиг.4) содержит магнитные частицы 3, например порошок магнитной окиси железа Fe2O3 в количестве 75-80% по весу (около 40% по объему), либо порошок магнетита Fe3O4, приобретая благодаря их наличию свойство быть носителем информации. Магнитные частицы могут быть расположены на проезжей части также путем нанесения на обычное дорожное покрытие 4 (фиг.5) краски 5, содержащей упомянутые частицы, образующие гомогенную смесь со связующим компонентом, например с полиуретановым. Магнитные частицы расположены по всей ширине проезжей части, то есть на всех ее участках, на которых может оказаться транспортное средство при маневрировании на проезжей части для объезда каких-либо препятствий.
Многозвенное транспортное средство, входящее в состав транспортного комплекса, может состоять из любого числа звеньев, например, из двух звеньев ведущего и ведомого, либо из большего числа звеньев, в частности из трех звеньев, как показано на фиг.1, а именно из ведущего звена 6, на котором расположена силовая установка (не показана), служащая для привода его колес, и двух ведомых звеньев 7 и 8. Ведомые звенья 7 и 8 шарнирно связаны между собой и с ведущим звеном 6 при помощи соединительных элементов 9 и 10.
Ведущее звено 6 имеет передние управляемые колеса 11, поворачиваемые при помощи рулевого механизма (не показан), имеющего ручное или автоматическое управление. Снизу ведущего звена 6 перед колесами 11 или между ними над проезжей частью 1 установлена записывающая магнитная головка 12, служащая для записи на проезжую часть 1 информации о траектории движения ведущего звена 6. Записывающая магнитная головка 12, посылая сигналы 13 на проезжую часть 1, образует на ней чередующиеся по полярности магнитные полюса, оставляя на проезжей части невидимые "метки", содержащие информацию о траектории 14 (показана условно) движения ведущего звена 6.
На каждом ведомом звене транспортного средства в аналогичном месте, что и на ведущем звене, поперек ведомого звена расположены по меньшей мере две считывающие (воспроизводящие) магнитные головки 15 и 16. Они служат для восприятия сигналов 17 с намагниченных участков проезжей части 1. Магнитные головки 15 и 16 подключены к устройству управления сервомеханизмом (не показан), служащим для управления колесами ведомого звена. В качестве силового органа сервомеханизма, поворачивающего непосредственно или посредством рычажной системы, включающей рулевую трапецию, управляемые колеса 18, 19 каждого ведомого звена, могут быть известные: малогабаритный реверсивный электродвигатель с редуктором, либо гидромотор с электрически управляемыми клапанами. Устройство управления сервомеханизмом содержит обычный компаратор. Он служит для определения разности величин сигналов, поступающих с магнитных головок 15 и 16, определения знака их разности и подачи соответствующего сигнала к сервомеханизму. На ведущем звене 6 перед записывающей магнитной головкой 12 установлена стирающая магнитная головка 20, сигнал 21 которой служит для ликвидации записи на проезжей части, случайно оставленной ранее проехавшим транспортным средством. На последнем ведомом звене 8 позади считывающих магнитных головок 15 и 16 расположена стирающая магнитная головка 22, сигнал 23 которой ликвидирует (стирает) запись на проезжую часть, сделанную магнитной головкой 12.
Способ управления многозвенным транспортным средством в рассматриваемом транспортном комплексе заключается в следующем.
На проезжую часть 1 при помощи магнитной головки 12 записывают информацию о положении на проезжей части ведущего звена 6 транспортного средства, отмечая таким образом траекторию 14 его движения. Затем эту информацию о траектории 14 считывают на каждом ведомом звене 7, 8 при прохождении его над участком проезжей части, на котором записана информация. Информацию считывают при помощи магнитных головок 15, 16 и используют ее при управлении колесами ведомого звена следующим образом.
В случае, если сигналы 17, поступающие от магнитных головок 15, 16, одинаковые, то их разность равна нулю и тогда команда к сервомеханизму управления колесами ведомого звена не поступает, при этом колеса 18, 19 сохраняют постоянным свое положение относительно самого ведомого звена.
Если сигналы 17, поступающие от магнитных головок 13 и 14, имеют разную величину, то тогда в устройстве управления сервомеханизмом при помощи компаратора определяют разность величин, а также знак этой разности, и подают пропорциональный этой разности управляющий сигнал к сервомеханизму. Получив сигнал, сервомеханизм поворачивает управляемые колеса, например, колеса 18 ведомого звена 7 в сторону траектории 14 движения ведущего звена 6 на угол, пропорциональный величине упомянутого управляющего сигнала. Действие управляющего сигнала сохраняется до тех пор, пока величины сигналов, поступающих на вход устройства управления с магнитных головок 15 и 16, не станут равными, что будет означать, что траектории движения ведущего 6 и ведомого 7 звеньев совпали.
Перед записью на проезжую часть информации о положении ведущего звена транспортного средства проезжую часть очищают от возможной ранее записанной на нее информации путем ее размагничивания с помощью магнитной головки 17, для того, чтобы ранее записанная на проезжую часть информация не создавала помехи в управлении звеньями транспортного средства.
Кроме того, записанную на проезжую часть информацию о положении ведущего звена транспортного средства стирают с проезжей части на последнем ведомом звене транспортного средства с помощью магнитной головки 18, для того чтобы эта информация не мешала управлению ведомыми звеньями других транспортных средств, следующих после данного транспортного средства.
Представленный транспортный комплекс может использоваться в многолюдных крупных и средних городах для обеспечения перевозки пассажиров в многозвенных автопоездах (в многозвенных автобусах) с любым числом звеньев, количество которых можно изменять в течение суток в зависимости от потребности. Так, утром и вечером, когда число пассажиров велико, к автопоезду могут быть присоединены дополнительные звенья, а днем, когда пассажиров мало, часть ведомых звеньев может быть отцеплена и храниться на конечных пунктах маршрута.
Кроме того, описанный транспортный комплекс может использоваться для перевозки деталей в цехах предприятий, а также для перевозки крупногабаритных грузов от места их изготовления к месту назначения, например, при строительстве крупных объектов, при этом такие грузы сами могут являться соединительным элементом между звеньями автопоезда, которые в этом случае представляют собой грузовые тележки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МНОГОЗВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2096230C1 |
| СПОСОБ МОНИТОРИНГА ПАССАЖИРСКОГО ТРАНСПОРТА | 2001 |
|
RU2204864C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СОЧЛЕНЁННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2601077C1 |
| Устройство для управления поворотом ведомых звеньев автопоезда | 1976 |
|
SU652019A1 |
| АВТОПОЕЗД | 2004 |
|
RU2288129C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2018128C1 |
| Способ управления движением активного многозвенного транспортного средства | 1976 |
|
SU652018A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПА ИЛИ ПОЛУПРИЦЕПА | 1969 |
|
SU235547A1 |
| СПОСОБ ПРОГРАММНО-ИНФОРМАЦИОННОГО УПРАВЛЕНИЯ ТРАНСПОРТОМ С ПРИМЕНЕНИЕМ АВТОМАТИЗИРОВАННОГО СРЕДСТВА НАВИГАЦИИ | 2019 |
|
RU2782549C2 |
| Устройство для измерения скольжения колесных пар рельсовых экипажей | 1983 |
|
SU1169849A1 |
Назначение: изобретение относится к транспортной технике, в частности к транспортным комплексам и способам управления колесами ведомых звеньев транспортного средства при движении по проезжей части. Сущность изобретения: транспортный комплекс включает в себя проезжую часть и многозвенное транспортное средство, состоящее из ведущего звена и сочлененных с ним ведомых звеньев, на каждом из которых имеется сервомеханизм для управления колесами. Проезжая часть содержит магнитное вещество, которое состоит из частиц, равномерно распределенных в ее покрытии части по всей ширине. Ведущее звено имеет записывающую магнитную головку, установленную над проезжей частью, а каждое ведомое звено считывающие магнитные головки, к которым подключено устройство управления сервомеханизмом. Способ управления многозвенным транспортным средством заключается в том, что на проезжую часть записывают информацию о положении ведущего звена, а затем эту информацию считывают на ведомых звеньях и используют ее при управлении колесами этих звеньев, причем в качестве записываемой используют информацию, характеризующую положение фиксированной точки ведущего звена, а считывание осуществляют в фиксированных точках ведомого звена. Транспортный комплекс и указанный способ обеспечивает достаточно точное следование ведомых звеньев транспортного средства по траектории его ведущего звена. 2 с. и 4 з.п. ф-лы, 5 ил.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для управления поворотом ведомых звеньев автопоезда | 1976 |
|
SU652019A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
