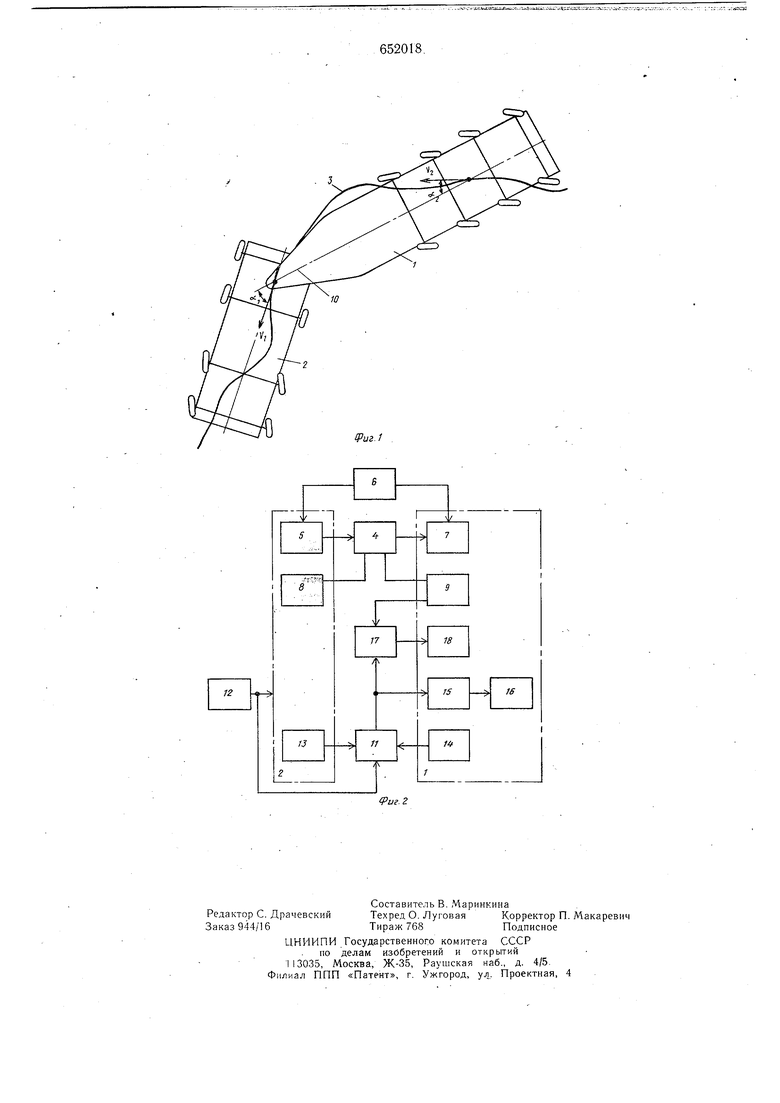
щего звена, определяется требуемая скорость движения каждого ведомого звена, в. соответствии с которой регулируются тормозной момент движителей ведомых звеньев и мощность, подводимую к двигателям автивных ведомых звеньев транспортного средства. При этом требуемую скорость движения ведомого звена определяют по формуле:тг-чт cosai va -Vi coscfs где Vi - требуемая скорость движения ведущего звена; Ui - угол складывания ведущего звена;аг - угол складывания ведомого звена. Сущность изобретения поясняется чертежами. На фиг. 1 схематически изображен автопоезд с активным полуприцепом; на фиг. 2 представлена блок-схема, реализующая изобретение. Выполнение условия движения ведомого звена I (фиг. 1) автопоезда или некоторых его точек в том же направлении, в которо.м двигалось ведущее звено 2 на данном- участке дороги 3, обеспечивается с помощью устройства задержки 4 (фиг. 2),.в котором задерживается сигнал с, датчика 5, несущего информацию о направлении движения ведущ,его звена относительно опорного направления, которое задают, например, гироскопом 6. Этот сигнал после задержки подают на рулевое устройство 7 ведомого.звена. Время задержки регулируют, в соответствии со скоростями движения V и Vg обоих звеньев. Данные скорости замеряются датчиками 8 и 9. Отсутствие или значительное уменьщение сил сжатия (растяжения) в сцепке, которые могут привести к сталкиванию звеньев автопоезда с траектории его движения или к его складыванию, обеспечивается равенством проекций скоростей ведущего и ведомого звена на линию их связи 10 Vi Cos0.1 Va Cosaa, гдеа; и а2 -углы складывания ведущего и ведомого звена со-. ответственно, только с помощью активных сил двигателей или тормозных устройств звеньев автопоезда. Для выполнения этого условия с помощью логического устройства 11, на входкоторого подаются сигналы с задатчика 12 требуемой скорости движения ведущего звена и с датчиков 13 и 14 углов складывания аi и а , формируется сигнал, соответствующий требуемой скорости движения ведомого звена. Этот сигнал подается на регулятор мощности 15 двигателей 16 ведомого звена, а также сравнивает- , ся с сигналом датчика 9 в сравнивающем устройстве 17, и если истинная скорость выше требуемой, увеличивается тормозной момент, прилагаемый к движителям 18 данного звена. Формула изобретения 1. Способ управления движением активного многозвенного транспортного средства, заключающийся в том, что измеряют углы складывания звеньев и передают информацию о направлении движения на каждое ведомое звено через устройство задержки, время задержки которого регулируют в соответствии со скоростями движения звеньев транспортного средства, отличающийся тем, что, с целью повышения.точности движения многозвенного транспортного средства по требуемой траектории, измеряют скорость движения каждого ведущего звена, определяют требуемую скорость движения каждого ведомого звена, в соответствии с которой регулируют тормозной момент движителей ведомых звеньев и мощность, подводимую к двигателям активных ведомых звеньев транспортного средства. 2. Способ по п. I, отличающийся тем, что требуемую скорость движения ведо.мого вена определяют по формуле: 7 л/ COSrti Vs V| fffi- - -Tскорость движения ведущего звеугол складывания ведущего звеугол складывания ведомого звеИсточники инфор.мации, принятые во внимание при экспертизе 1.Патент США N° 3455408, кл. 180-79.2, 1968. 2..Авторское свидетельство СССР Aio 235547, кл. В 62 D 13/00, 1967.
. 5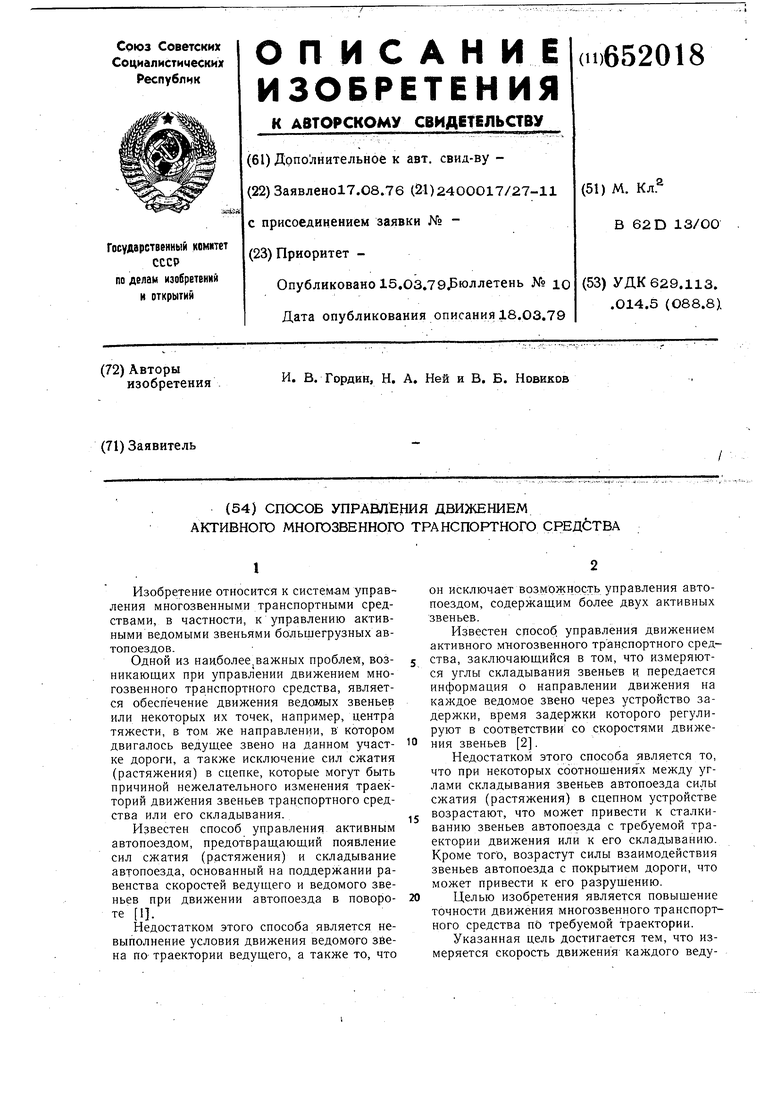
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МНОГОЗВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2096230C1 |
| Устройство для управления поворотом ведомого звена автопоезда | 1985 |
|
SU1311989A1 |
| ТРАНСПОРТНЫЙ КОМПЛЕКС И СПОСОБ УПРАВЛЕНИЯ МНОГОЗВЕННЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1992 |
|
RU2041104C1 |
| Способ управления движением активного многозвенного транспортного средства и устройство для его осуществления | 1982 |
|
SU1094790A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СОЧЛЕНЁННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2601077C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТОРМОЗНЫХ СИЛ НА КОЛЕСАХ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2028227C1 |
| ПРИВОД КОЛЕС ПОЛУПРИЦЕПА АКТИВНОГО АВТОПОЕЗДА | 1999 |
|
RU2167779C1 |
| Ведущий мост транспортного средства | 1988 |
|
SU1586928A1 |
| Устройство торможения тягового электропривода автопоезда | 1984 |
|
SU1341073A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340472C2 |