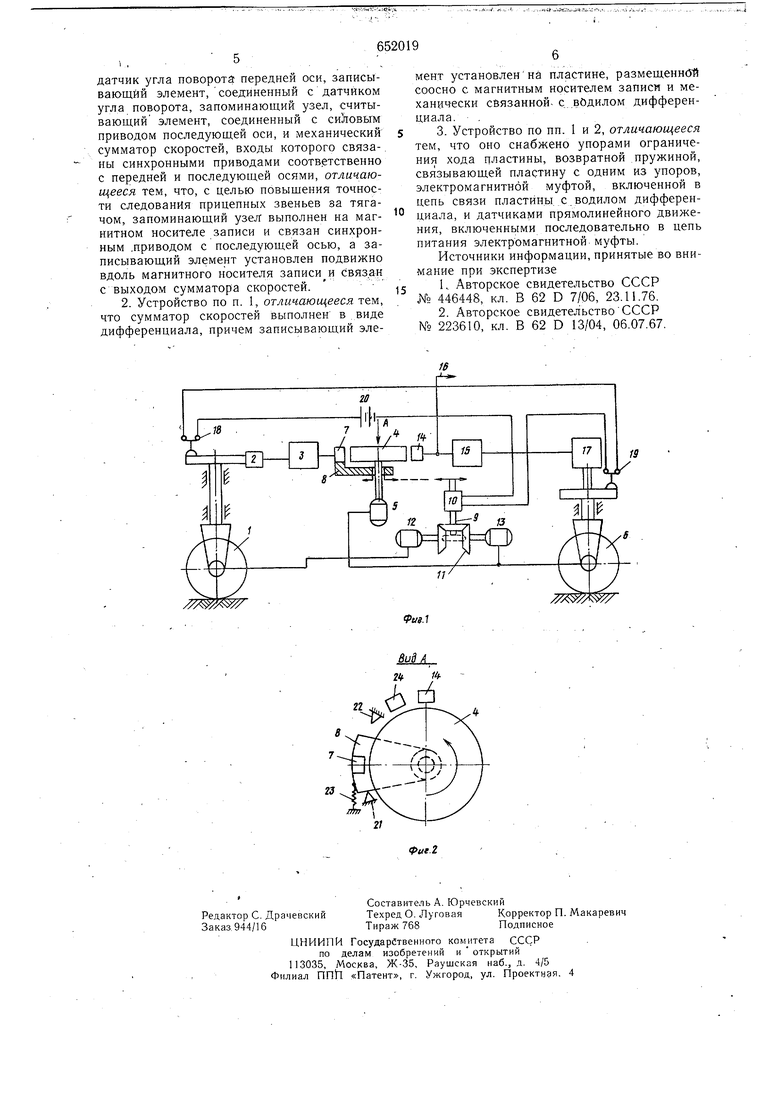
Изобретение относится к области автомобилестроения, в частности, к системам управления поворота автотраксгтортных средств и, конкретно, к устройствам управления, поворотом ведомых звеньев автопоезда. Известно устройство для управления поворотом ведомых звеньев автопоезда, содержащее датчик поворота колес передней оси, механический запоминающий и считывающий элемент и электрический привод управления поворотом колес прицепных звеньев 1. Такое зстройство не обеспечивает точного копирования траектории тягача из-за дискретности управления механической записывающей и считывающей системой. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для управления поворотом ведомых звеньев автопоезда, содержащее датчик угла поворота передней оси, записывающий элемент, соедийенный с датчиком угла поворота, запоминающий узел, считывающий элемент, соединенный с силовым приводом последующей оси, и механический сумматор скоростей, входы которого связаны синхронными приводами соответственно с передней и последующей осями 2. Недостатком такого устройства является невозможность обеспечения необходимого времени запаздывания сигнала на поворот колес последующей оси и, как следствие, низкая точность следования прицепных звеньев за тягачом. Цель изобретения - повыщение точности следования прицепных звеньев за тягачом. Указанная цель достигается тем, что запоминающий узел выполнен на магнитном носителе записи И связан синхронным приводом с последующей осью, а записывающий элемент установлен подвижно вдоль магнитного носителя, записи и связан с выходом сумматора скоростей, а также тем, что сумматор скоростей выполнен в виде дифференциала, причем записывающий элемент установлен на пластине, размещенной соосно с магнитным носителем записи и механически связанной с водилом дифференциала, и тем, что устройство.снабжено упорами ограничения хода пластины, возвратной пружиной, связывающей пластину с одним из упоров, электромагнитной муфтой, включенной в цепь связи пластины с водилом дифференциала, и датчиками прямолинейного движения, включенными последовательно в цепь питания электромагнитной муфты. Изобретение иллюстрируется чертежами, где на фиг. 1 показана общая схема устройства; на фиг. 2 - вид А на фиг. 1. Передние колеса 1 и передняя ось соединены с датчиком угла поворота 2, соединенным со входом бл-ока записи 3 запоминающего узла, выполненного в виде импульсной системы программного управления с магнитньш носителем записи., который может быть выполнен в виде магнитного барабана 4, соединенного синхронным приводом 5 с задними управляемыми колесами 6 последующей осью. Записывающий элемент - головка записи 7 запоминающего узла соединена с выходом блока записи 3 и размещена на пластине 8, соосной с барабаном 4. Пластина 8 установлена подвижно вокруг оси вращения барабана 4 и связана с водилом 9 дифференциала с помощью электромагнитной муфты 10. Боковые щестерни II дифференциала, выполняющего функцию сумматора скоростей, связаны синхронными электрическими приводами 12 и 13 соответственно с передними 1 и задними 6 управляемыми колесами, т. е. с передней и последующей, осями. Считывающий эле.мент - головка 14 запоминающего устройства выполнена неподвижной и соединена со входом блока воспроизведения 15, а связью 16 - с головкой записи запоминающего узла последующего звена (на чертеже не показано). Выход блока воспроизведения соединен с силовым приводом поворота колес, в качестве которого используется, например, шаговый электродвигатель 17, вал которого связан с задними управляемыми колесами 6. Устройство содержит также датчики прямолинейного движения 18 и 19, связывающие электромагнитную муфту 10с источником .питания 20 для возможности отключения связи пластины 8 с водилом 9 при прямолинейном движении звена. Запоминающий узел также снабжен упорами 21 и 22, ограничивающими ход пластины 8, возвратной пружиной 23 и стирающей головкой 24. Упор 21 установлен так, что расстояние между головками 7 и 14 вдоль окружности барабана пропорционально базе звена. Упор 22 соответствует другому крайнему положению головки 7, когда расстояние от нее до головки 14 пропорционально длине пути между передними и задними колесами при движении звена по окружности с минимальньш радиусом. Устройство работает следующил образом. При входе звена в поворот датчики узла поворота 2 фиксируют угол поворота передних колес и посылают сигнал в блок записи 3 запоминающего узла. Блок записи преобразует сигнал в удобный для записи на магнитный носитель вид и посылает его на головку записи 7. Головка 7 записывает сигнал на магнитный барабан 4, который вращается со скоростью, пропорциональной скоростл вращения задних колес 6. Пластина 8, на которой посажена головка Записи 7, приводится во вращение от водила 9 дифференциала, боковые щестерни 11 которого вращаются со скоростью, пропорциональной соответственно скорости вращения передних и задних колес. Таким образом, головка 7, передвигаясь вдоль окружности барабана с разностью скоростей передних и задних колес, в каждый момент времени устанавливается на расстоянии, пропорциональном длине пути от задних колес до передних. При прохождении этого пути задние колеса попадут в ту точку траектории, угол поворота которой был записан на магнитный барабан 4. В этот момент произойдет считывание сигнала головкой 14. Далее сигнал по связи 16 поступит на записывающую головку следующего звена и в блок воспроизведения 15, который преобразует сигнал для возможности управления щаговым электродвигателе.У 17. Шаговый электродвигатель поворачивает задние колеса 6 на такой же угол, на который были повернуты передние колеса в этой точке траектории. Далее сигнал стирается головкой 24 и магнитный барабан готов для записи но; вых сигналов. При выходе из поворота на прямолинейный участок пути контакты датчиков 18 и 19 замыкаются, отключая с помощью муфты 10 водило 9 от пластины 8. При этом возвратная пружина 23 поворачивает ее до упора 21 и головка 7 устанавливается от головки 14 нарасстояние, пропорциональное базе звена. В условиях эксплуатации возможно появление ошибок в определении пути запаздывания, связанных с пробуксовкой колес, заносами на повороте, боковым уводом эластичных щин и другими случайными факторами. Однако эти ошибки ограничиваются постановкой упоров 21 и 22. Упор 21 соответствует пути запаздывания при прямолинейном движении, равному базе. Упор. 22 соответствует .максимально возможному пути запаздывания, который получается при установившемся движении по окружности с минимальным радиусом. Кроме того, эти ошибки полностью устраняются при прямолинейном движении, когда под. действием пружины 23 головка записи устанавливается на расстояние, равное базе. Таким образом, устройство по данно.му изобретению обеспечивает точное следова-. ние прицепнььх звеньев за тягачом и автоматически корректирует ошибки, вызванные влиянием эксплуатационных факторов на траекторию движения. Формула изобретения 1. Устройство для управления поворотом ведомЕзГх звеньев автопоезда, содержащее
датчик угла поворота передней оси, записывающий элемент,соединенный с датчиком угла поворота, запоминающий узел, считывающий элемент, соединенный с силовым приводом последующей оси, и механический сумматор скоростей, входы которого связа-, ны синхронными приводами соответственно с передней и последующей осями, отличающееся тем, что, с целью повышения точности следования прицепных звеньев за тягачом, запоминающий узел выполнен на магнитном носителе записи и связан синхронным .приводом с последующей осью, а записывающий элемент установлен подвижно вдоль магнитного носителя записи и связ.ан с выходом сумматора скоростей.
2. Устройство по п. I, отличающееся , что сумматор скоростей выполнен в .виде дифференциала, причем записывающий элемент установленна пластине, размещенной соосно с магнитным носителем записи и механически связанной, с вОдилом дифференциала.
3. Устройство по пп. 1 и 2, отличающееся тем, что оно снабжено упорами ограничения хода пластины, возвратной пружиной, связывающей пластину с одним из упоров, электромагнитной муфтой, включенной в цепь связи пластины. с ВОДИЛОМ дифференциала, и датчиками прямолинейного движения, включенными последовательно в цепь питания электромагнитной, муфты.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 446448, кл. В 62 D 7/06, 23.11.76.
2.Авторское свидетельствоСССР № 223610, кл. В 62 D 13/04, 06.07.67.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления колесами звеньев автопоезда | 1977 |
|
SU765083A2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МНОГОЗВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2096230C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПА ИЛИ ПОЛУПРИЦЕПА | 1967 |
|
SU223610A2 |
| Устройство для управления поворотом ведомого звена автопоезда | 1985 |
|
SU1311989A1 |
| ТРАНСПОРТНЫЙ КОМПЛЕКС И СПОСОБ УПРАВЛЕНИЯ МНОГОЗВЕННЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1992 |
|
RU2041104C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПА ИЛИ ПОЛУПРИЦЕПА | 1969 |
|
SU235547A1 |
| Устройство для управления колесами прицепных звеньев автопоезда | 1971 |
|
SU446448A1 |
| Двухзвенное транспортное средство | 1987 |
|
SU1426864A1 |
| Устройство управления автопоездом | 1988 |
|
SU1655833A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТОРМОЗНЫХ СИЛ НА КОЛЕСАХ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2028227C1 |
