Изобретение относится к транспортным комплексам, включающим в себя многозвенное безрельсовое наземное колесное транспортное средство и проезжую часть для этого транспортного средства, содержащую магнитное вещество, и касается управления колесами ведомых звеньев транспортного средства при движении по упомянутой проезжей части.
Управление положением ведомых звеньев безрельсовых колесных транспортных средств, например, автопоездов, представляет большие трудности и требует принятия специальных мер для обеспечения движения каждого ведомого звена точно по траектории ведущего звена во избежание наезда на какие-либо препятствия, встречающиеся на пути автопоезда, особенно при его эксплуатации в городе.
Известно устройство для управления колесами звеньев автопоезда, содержащее датчик угла поворота колес предшествующего звена, датчик угла складывания смежных звеньев автопоезда, сумматор углов, выход которого соединен с приводом поворота колес, блок запаздывания, включенный между датчиком угла поворота колес предшествующего звена и одним из входов сумматора, второй вход которого соединен с датчиком угла складывания предшествующего звена с последующим звеном (авт. св. СССР N 765083, кл. B 62 D 13/02, 1097).
Однако это устройство обеспечивает движение колес прицепных звеньев по траектории передних колес головного звена лишь в пределах нормального качения колес.
Известно рулевое управление прицепного звена транспортного средства, содержащее повторную тележку с поворотным кругом, кинематически связанную с поворотным кольцом рамы и с дышлом, и механизм изменения частоты вращения колес прицепного звена, состоящий из двух электромагнитных муфт, входы которых кинематически связаны с колесами прицепного звена, а выходы с фрикционными дисками торового вариатора, связанных между собой посредством двух роликов, установленных с возможностью ограниченного поворота симметрично относительно оси колес тележки на оси приводного двигателя с возможностью изменения передаточного числа между обоими колесами тележки, при этом приводной двигатель и электромагнитные муфты электрически соединены через сравнивающий элемент с датчиком поворота поворотной тележки и через блок запаздывания с датчиком поворота управляемых колес, а дышло кинематически связано с поворотной тележкой посредством дополнительного кольца, охватывающего поворотное колесо рамы и выполненное с возможностью фиксации относительно поворотной тележки (авт. св. СССР N 1425124, кл. B 62 D 13/02, 1982).
Однако такое рулевое управление прицепным звеном имеет очень сложную конструкцию, что делает его ненадежным.
Известен способ управления движением многозвенного транспортного средства по проезжей части, содержащей магнитное вещество, путем изменения положения колес ведущего звена, магнитной записи на проезжую часть информации о траектории ведущего звена и считывании указанной информации на ведомом звене для управления колесами этого ведомого звена (см. патент РФ N 2041104, кл. B 62 D 13/04, 1995).
Реализующая этот способ система управления движением многозвенного транспортного средства по проезжей части, имеющей магнитное вещество, содержит рулевой механизм для изменения колес ведущего звена, записывающую магнитную головку, расположенную на ведущем звене над проезжей частью, считывающие магнитные головки, расположенные напротив проезжей части на ведомом звене, компаратор, входы которого подключены к упомянутым считывающим магнитным головкам, а выход к сервомеханизму для изменения положения колес ведомого звена.
При таком управлении многозвенным транспортным средством обеспечивается постоянный и притом непосредственный контроль положения его ведомых звеньев относительно траектории ведущего звена, что особенно важно при крутых маневрах, совершаемых транспортным средством на городских улицах в случае использования его в качестве пассажирского автопоезда, состоящего из множества вагонов. Это позволяет ему вписываться в сравнительно узкий коридор на проезжей части, не задевая находящиеся на ней объезжаемые транспортные средства и не заезжая на тротуар при повороте на поперечную улицу. Однако при указанном управлении ведомыми звеньями такого транспортного средства возможно значительное влияние их управляемых колес, особенно на извилистой трассе, так как в те моменты времени, когда сигналы от считываемых головок, находящихся на ведомых звеньях, одинаковые, положение этих колес становится неопределенным, и лишь при отклонении ведомых звеньев от траектории ведущего звена появляется сигнал, нужный для управления этими колесами. Это приводит к непрерывным отклонениям ведомых звеньев от траектории ведущего звена, приводящим к рысканию этих звеньев, что ухудшает комфортабельность езды пассажиров.
Задачей, решаемой изобретением, является повышение комфортабельности езды пассажиров в многозвенном транспортном средстве, перемещающемся по проезжей части, содержащей магнитное вещество. Для решения указанной задачи при управлении движением многозвенного транспортного средства по проезжей части, содержащей магнитное вещество, осуществляемом путем изменения положения колес ведущего звена, магнитной записи на проезжую часть информации с траектории ведущего звена и считывании указанной информации на ведомом звене, измеряют текущие значения угла поворота управляемых колес ведущего звена, запоминают величины этого угла с учетом их знака, задерживают их в памяти, корректируют с учетом информации, считываемой с проезжей части, а затем используют для управления колесами ведомого звена.
Достоинством такого способа управления движением многозвенного транспортного средства по проезжей части, содержащей магнитное вещество, является более точное следование ведомых звеньев по траектории движения ведущего звена, так как учитывается не только место на проезжей части, через которое проследовало ведущее звено, но и угол поворота управляемых колес этого звена при его нахождении в этом месте. Вследствие этого максимально допустимые отклонения ведомых звеньев от траектории ведущего звена случаются реже, и поэтому они движутся более плавно, благодаря чему комфортабельность езды пассажиров в многозвенном транспортном средстве повышается. Таким является технический и связанный с ним общественнополезный результат от использования указанного технического решения.
Созданная система управления движением многозвенного транспортного средства по проезжей части, имеющей магнитное вещество, содержащая рулевой механизм для изменения положения колес ведущего звена, сервомеханизм для изменения положения колес ведомого звена, записывающую магнитную головку, расположенную на ведущем звене над проезжей частью, считывающие магнитные головки, расположенные на ведомом звене напротив проезжей части, компаратор, входы которого подключены к упомянутым считывающим магнитным головкам, отличается тем, что она дополнительно содержит датчик угла поворота управляемых колес ведущего звена, блок запаздывания сигнала от упомянутого датчика и сумматор, один из входов которого подключен к блоку запаздывания, другой вход соединен с компаратором, а выход подключен к упомянутому сервомеханизму.
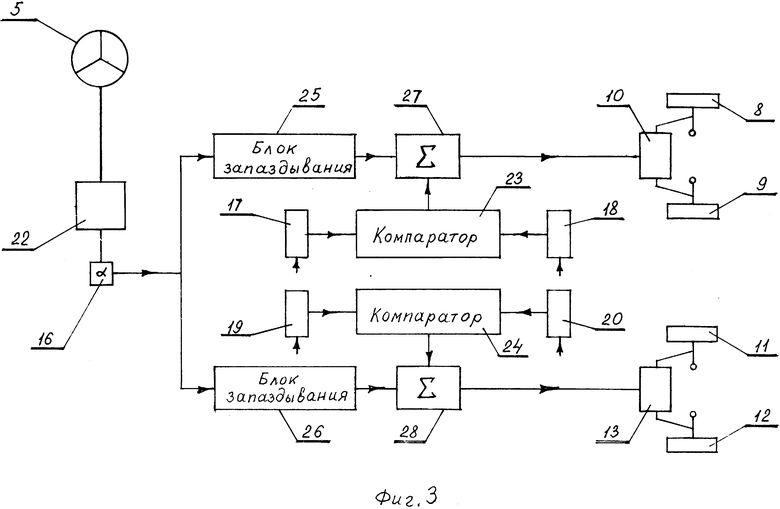
На фиг. 1 изображено многозвенное транспортное средство, расположенное на проезжей части, содержащей магнитное вещество; на фиг. 2 вид сверху на многозвенное транспортное средство; на фиг. 3 функциональная схема системы управления движением многозвенного транспортного средства по проезжей части, содержащей магнитное вещество.
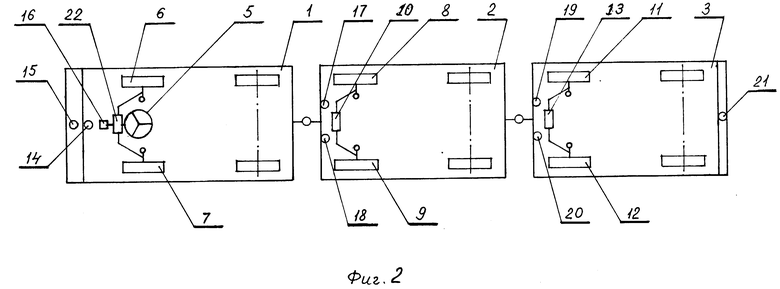
Многозвенное транспортное средство, изображенное на фиг. 1, состоит из ведущего звена 1 и ведомых звеньев 2 и 3, которых может быть любое число. Это транспортное средство расположено на особой проезжей части 4, содержащей по всей ее ширине магнитное вещество, например частицы окиси железа или магнетита.
Ведущее звено имеет обычное рулевое управление с помощью рулевого колеса 5, с которым кинематически связаны управляемые колеса 6 и 7 (фиг. 2). Управляемые колеса 8 и 9 ведомого звена 2 имеют автоматическое управление посредством сервомеханизма 10, а управляемые колеса 11 и 12 другого ведомого звена 3 имеют автоматическое управление с помощью сервомеханизма 13.
На ведущем звене 1 над проезжей частью расположена записывающая магнитная головка 14, служащая для записи на проезжую часть информации о траектории движения ведущего звена. Впереди нее тоже над проезжей частью установлена стирающая магнитная головка 15, служащая для "стирания" с проезжей части возможной ранее записанной информации, которая может быть помехой при считывании информации, касающей траектории движения ведущего звена. Кроме того, на ведущем звене 1 установлен датчик угла поворота его управляемых колес, например, датчик 16 угла α поворота рулевого колеса 5.
На ведомом звене 2 напротив проезжей части расположены считывающие магнитные головки 17 и 18, размещенные поперек этого звена так, чтобы между ними располагался след, оставляемый на проезжей части магнитной головкой 14. На ведомом звене 3 аналогичным образом размещены считывающие магнитные головки 19 и 20. Кроме того, на последнем ведомом звене 3 сзади установлена стирающая магнитная головка 21.
Способ управления движением этого многозвенного транспортного средства по проезжей части, содержащий магнитное вещество, заключается в следующем.
Во время движения транспортного средства осуществляют с помощью магнитной головки 14 магнитную запись на проезжую часть (фиг. 1) информации о траектории ведущего звена 1. При маневрировании, при объезде препятствий, при подъезде к месту остановки изменяют положение управляемых колес 6 и 7 (фиг. 2) ведущего звена, отчего изменяется траектория его движения, что отражается на конфигурации следа, оставляемого на проезжей части записывающей магнитной головкой 14. Информацию о траектории движения ведущего звена считывают на ведомом звене 2 с помощью считывающих магнитных головок 17 и 18, а также на ведомом звене 3 с помощью магнитных головок 19 и 20. При этом измеряют датчиком 16 текущие значения угла поворота управляемых колес 6 и 7 ведущего звена, а именно угла поворота рулевого колеса 5, запоминают величины этого угла с учетом их знака, то есть учитывая, в какую сторону (влево или вправо) повернуты колеса 6 и 7, и задерживают запоминаемые текущие значения указанного угла в памяти на время перемещения ведомого звена на место, занимаемое в данный момент времени ведущим звеном. После этого их корректируют, уменьшая в случае, если отклонение ведомого звена от траектории ведущего звена произошло в ту же сторону, в которую повернуты колеса ведомого звена, и увеличивая в противном случае. Затем текущие значения угла поворота управляемых колес ведущего звена, скорректированные с учетом информации, считываемой магнитными головками с проезжей части, используют для управления колесами ведомых звеньев, подавая управляющий сигнал нужной величины и соответствующего знака.
Система управления движением многозвенного транспортного средства по проезжей части, в которой имеется магнитное вещество, содержит рулевой механизм 22 с рулевым колесом 5 для изменения положения управляемых колес 6 и 7 ведущего звена 1, записывающую магнитную головку 14, расположенную на ведущем звене 1 под ним над проезжей частью, причем либо там, где расположена продольная ось симметрии ведущего звена, либо в другом месте, считывающие магнитные головки 17 и 18, размещенные на ведомом звене 2 поперек него напротив проезжей части, а также считывающие магнитные головки 19 и 20, расположенные аналогичным образом на ведомом звене 3. Считывающие магнитные головки 17 и 18 подключены к входам компаратора 23 (фиг. 3), а считывающие магнитные головки 19 и 20 к входам другого компаратора 24. Компараторы 23 и 24 определяют разность или соотношение сигналов, поступающих от считывающих магнитных головок. Кроме того, в электрической цепи управления первым ведомым звеном 2 имеется блок запаздывания 25, а в электрической цепи управления вторым ведомым звеном 3 другой блок запаздывания 26. Каждый из этих блоков в качестве магнитного носителя записи может включать в себя магнитный барабан или магнитную ленту с натяжным механизмом, имеющие регулируемый привод с переменной скоростью, пропорциональной скорости движения транспортного средства, и собственные магнитные головки записи и воспроизведения электрического сигнала. Вход блока запаздывания 25 подключен к датчику 16 угла поворота рулевого колеса 5, а выход к одному из входов сумматора 27, другой вход которого соединен с выходом компаратора 23. К выходу сумматора 27 подключен электомеханический сервомеханизм 10, служащий для изменения положения управляемых колес 8 и 9 первого ведомого звена 2. Указанный сервомеханизм может состоять из шагового электродвигателя и механического редуктора, соединенного с рулевой трапецией, связанной с колесами 8 и 9. Вход другого блока запаздывания 26 подключен тоже к датчику 16, а выход к одному из входов сумматора 28, другой вход которого связан с выходом компаратора 24. К выходу сумматора 28 подключен электромеханический сервомеханизм 13, который служит для изменения положения управляемых колес 11 и 12 второго ведомого звена 3.
Система управления движением многозвенного транспортного средства по проезжей части, имеющей магнитное вещество, работает следующим образом.
Во время движения транспортного средства его водитель в зависимости от складывающейся дорожно-транспортной обстановки изменяет направления движения ведущего звена 1, (фиг. 1), поворачивая для этого рулевое колесо 5. Величина и знак поворота рулевого колеса 5 определяются с помощью датчика 16, который посылает соответствующий сигнал, имеющий определенную величину и определенный знак, в блоки запаздывания 25 и 26 (фиг. 3). В каждом из этих блоков полученный сигнал запоминается и задерживается в памяти на время, которое затрачивается на перемещение соответствующего ведомого звена на место, которое занимало ведущее звено в момент подачи данного сигнала датчиком 16. При этом в блоке запаздывания 26 сигнал задерживается дольше, чем в блоке 25, так как второе ведомое звено 3 (фиг. 1) расположено дальше от ведущего звена 1, чем первое ведомое звено 2, и поэтому требуется больше времени для перемещения на место ведущего звена. Считывающие магнитные головки 17 и 18 (фиг. 3), следя за магнитным следом, оставляемым на проезжей части записывающей магнитной головкой 14, выдают сигналы, пропорциональные расстоянию от этих головок до указанного следа. Эти сигналы поступают в компаратор 23, который вычисляет их разность либо их соотношение и подает соответствующий сигнал определенного масштаба, принятого для данного транспортного средства, в сумматор 27, к которому поступает сигнал также от блока запаздывания 25. Сигнал, поступивший от блока запаздывания 25, корректируется с учетом сигнала, принятого от компаратора 23. Так если величина сигнала от компаратора 23 равна нулю, что означает, что первое ведомое звено 2 движется точно по траектории ведущего звена, то тогда сигнал от блока запаздывания 25 проходит через сумматор 27 к сервомеханизму 10 без изменения. В этом случае управляемые колеса 8 и 9 ведомого звена 2 поворачиваются сервомеханизмом 10 на такой же угол, на котором были повернуты управляемые колеса ведущего звена в тот момент времени, когда это звено находилось на этом самом месте проезжей части. Если же сигнал от компаратора 23 отличен от нуля, то в этом случае сигнал, поступивший от блока запаздывания 25, суммируется с сигналом от компаратора 23 с учетом его звена. В частности, если, например, сигнал от блока запаздывания 25 условно положительный, показывающий, что управляемые колеса ведущего звена были повернуты вправо, а сигнал от компаратора 23 является тоже условно положительным, показывающим, что ведомое звено 2 отклонилось от траектории ведущего звена влево, то эти сигналы складываются и тогда к сервомеханизму 28 от сумматора 27 поступает общий сигнал большей величины, вызывающий поворот управляемых колес 6 и 7 ведомого звена 2 на угол, больший угла поворота колес ведущего звена. Это позволяет вернуть упомянутое ведомое звено 2 на траекторию ведущего звена. Если же сигнал от блока запаздывания 25 по-прежнему условно положительный, а сигнал, поступающий от компаратора 23, условно отрицательный, что означает, что ведомое звено 2 отклонилось от траектории ведущего звена вправо, то тогда происходит вычитание сигналов. В этом случае к сервомеханизму 10 от сумматора 27 поступает сигнал меньшей величины по сравнению с сигналом, поступившим к упомянутому сумматору от блока запаздывания 25. Этот сигнал вызывает поворот колес 6 и 7 ведомого звена 2 на угол, меньший угла поворота колес ведущего звена, что способствует приближению ведомого звена 2 к траектории ведущего звена 1.
Аналогично производится управление положением колес другого ведомого звена 3.
Такое управление положением управляемых колес ведомых звеньев многозвенного транспортного средства, осуществляемое на основе показаний датчика угла поворота управляемых колес ведущего звена, в частности, рулевого колеса, и контролируемое с помощью магнитных головок, непосредственно отслеживающих траекторию ведущего звена по оставляемому им на проезжей части особому следу в виде намагниченных ее участков, позволяет осуществить достаточно точное следование ведомых звеньев по траектории ведущего звена даже в случае значительного увода или бокового проскальзывания шин и при этом обеспечить плавный выход отклонившегося ведомого звена на траекторию ведущего звена.
Многозвенное транспортное средство с таким управлением ведомыми звеньями, перемещающееся по проезжей части, имеющей покрытие с магнитным веществом, может успешно использоваться в крупных и средних городах с большой плотностью населения в качестве пассажирского транспортного средства для перевозки больших групп людей, заменяя собой метрополитен. При использовании таких наземных транспортных средств вместо метрополитена отпадает необходимость в прокладывании дорогостоящих подземных тоннелей, требующих установки металлоемких эскалаторов. При этом маршруты движения таких наземных транспортных средств при необходимости можно легко изменять, что невозможно делать в метро, где маршрут однозначно определяется уже проложенным тоннелем. Причем при таких транспортных средствах облегчается труд водителя, так как он основную часть времени работает при естественном освещении, а не при искусственном, при котором утомляемость глаз наступает гораздо быстрее. Повышаются удобства для пассажиров, поскольку поездка в наземном транспортном средстве приятнее, чем в подземном. Достоинством таких многозвенных транспортных средств по сравнению с обычными автобусами и троллейбусами является то, что для них требуется меньшее число водителей, и они занимают меньшую часть проезжей части, так как по условиям безопасности дорожного движения между автобусами во избежание их столкновения требуется соблюдать большее расстояние, чем между звеньями автопоезда.
Транспортные звенья с таким управлением для движения по проезжей части, содержащей магнитное вещество, можно использовать также на предприятиях для внутрицеховых и межцеховых перевозок деталей и комплектующих изделий от места их изготовления к месту сборки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНЫЙ КОМПЛЕКС И СПОСОБ УПРАВЛЕНИЯ МНОГОЗВЕННЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1992 |
|
RU2041104C1 |
| СПОСОБ МОНИТОРИНГА ПАССАЖИРСКОГО ТРАНСПОРТА | 2001 |
|
RU2204864C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СОЧЛЕНЁННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2601077C1 |
| Устройство для управления поворотом ведомого звена автопоезда | 1985 |
|
SU1311989A1 |
| Рулевое управление прицепных звеньев безрельсового транспортного средства | 1975 |
|
SU554180A1 |
| Устройство управления движением прицепных звеньев безрельсового транспортного средства | 1984 |
|
SU1318472A1 |
| Способ управления движением активного многозвенного транспортного средства и устройство для его осуществления | 1982 |
|
SU1094790A1 |
| Устройство для управления поворотом ведомых звеньев автопоезда | 1976 |
|
SU652019A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ВОДИТЕЛЯ | 1992 |
|
RU2106278C1 |
| Устройство рулевого управления транспортного средства | 1977 |
|
SU734049A1 |
Использование: изобретение относится к транспортным комплексам, включающим в себя многозвенное транспортное средство, в котором для повышения комфортабельности пассажиров обеспечивается более точное следование ведомых звеньев по траектории движения ведущего звена. Сущность изобретения: во время движения транспортного средства магнитной головкой производят запись траектории ведущего звена на проезжую часть, содержащую магнитное вещество. При этом измеряют текущие значения угла поворота управляемых колес ведущего звена, поворачиваемых рулевым колесом, запоминают их, задерживают в памяти на время, затрачиваемое для перемещения каждого из ведомых звеньев на место ведущего звена, корректируют с учетом считываемой магнитными головками информации о местоположении ведомых звеньев относительно траектории ведущего звена и подают управляющие электрические сигналы к сервомеханизмам, служащим для измерения положения колес ведомых звеньев. Система управления содержит также компараторы, блоки запаздывания и сумматоры, число которых равно числу ведомых звеньев. 1 з.п. ф-лы, 3 ил.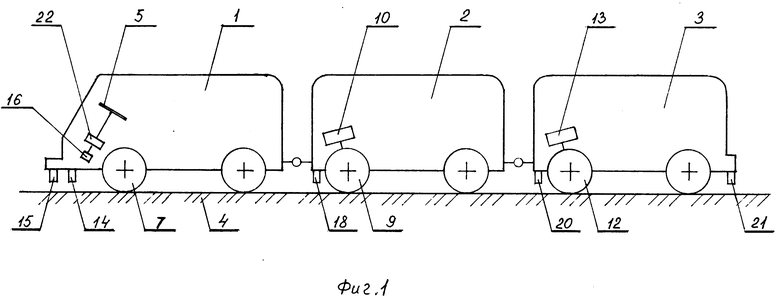
| RU, патент, 2041104, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
