Изобретение касается путевого измерителя для выявления истинного состояния железнодорожного пути по сравнению с заданным состоянием пути, содержащего опирающуюся на рельсовый ходовой механизм раму ходовой части, имеющую плоскость рамы, проходящую параллельно базовой плоскости, образованной базовыми точками колес, и транспортируемую на ней и независимо перемещаемую вспомогательную каретку.
Путевой измеритель такого типа хорошо известен из проспекта "ЕМ SAT Geometer Wagen" фирмы Plasser Theurer. Над плоскостью машинной рамы располагается крупногабаритная ездовая кабина, а также мощный привод ходовой части.
Второй путевой измеритель, названный сателлитной кареткой, связан с лазерным излучателем для создания опорной хорды и может соединиться с машинной рамой для общего перемещения под плоскостью рамы.
Из патента США N 4691565 уже известна машина для измерения или соответственно регистрации и/или даже корректировки положения пути впереди движущейся кареткой при ее движении по некорректированному пути. Эта движущаяся впереди каретка, оснащенная лазерным излучателем и приводом ходовой части, для общего перемещения над торцевой, выполненной в виде рампы конечной областью машины, может по ней двигаться. Эта машина, выполненная как каретка измерения пути, имеет лазерный приемник, расположенный в ее передней концевой части, а также различные устройства для выявления и накопления данных для корректировки пути.
В журнале "Eiβenbahntechnische Rundschau" N 39, 1990, 4 тетрадь, с. 201-211, из п.2.2 вытекает, что подбойным работам по получению номинальных характеристик для геометрии пути предшествуют дорогостоящие работы по измерению и оценке истинного состояния пути. Посредством измерительной машины ЕМ-SAT были предприняты попытки механизации этих работ. Между вспомогательной кареткой, установленной в зафиксированной точке, и непрерывно наезжающим на нее путевым измерителем в качестве опорной хорды используется лазерный луч. При этом измеряются стрелы подъема к лазерной опорной хорде, оцифровываются и запоминаются в компьютере. Посредством дополнительных измерений базовых расстояний до фиксированных точек можно выявить разницу с заданным положением и рассчитать необходимые смещения и подъемы, которые могут служить входными данными для компьютера, управляющего машиной подбивки шпал. Посредством геометрической тележки СМ80, устройства 17 м длины и весом 30 т, разделяющего на месте производства работ на приемную и передающую части, эти работы должны производиться быстро, экономично и безопасно перед движением поездов на соседнем рабочем пути.
Задачей настоящего изобретения является создание путевого измерителя указанного вначале типа, который при сокращении конструктивных затрат обеспечивал бы весьма рациональный способ эксплуатации.
В соответствии с изобретением эта задача решается тем, что в путевом измерителе, предназначенном для выявления истинного состояния пути по отношению к заданному состоянию пути, содержащем раму, опирающуюся на ходовые механизмы, плоскость которой параллельна базовой плоскости, образованной опорными точками колес, лазерный приемник, установленный на измерительной тележке, связанной с рамой с возможностью вертикального и поперечного перемещения относительно этой тележки, вспомогательную каретку, разъемно закрепленную на раме, лазерный излучатель, установленный на каретке с возможностью вертикального и поперечного перемещения относительно нее, высота ограничена условной наклонной плоскостью, образующей с базовой плоскостью в передней по ходу движения путеизмерителя его части угол наклона, равный 5-10о, при этом условная линия пересечения условной наклонной плоскости и плоскости рамы параллельна базовой плоскости и перпендикулярна продольному направлению движения путевого измерителя.
Путевой измеритель такого типа с малой габаритной высотой и с вспомогательной кареткой особо целесообразным образом может сочетаться с путеукладочной машиной, в частности, со шпалоподбойной машиной, с целью всестороннего подхода к месту использования. При этом система машин может особо рациональным способом без нарушения видимости управляться из ездовой кабина шпалоподбойной машины. Такое комбинированное передвижение обеспечивает очень простое исполнение путевого измерителя с вспомогательным электродвигателем, необходимым лишь для рабочего пользования, сравнительно малой мощности, но при этом благодаря соответствующему угловому диапазону ограничительной плоскости становится возможной достаточно большая габаритная длина рамы ходовой части для достижения наиболее удовлетворительного результата езды во время передвижения. Кроме того, такого типа путевой измеритель со вспомогательной кареткой может без конструктивных затрат и соответственно переналадочных работ стыковаться с уже находящимися в эксплуатации шпалоподбойными машинами. Передвижение такого типа в общей системе машин со шпалоподбойной машиной обеспечивает измерения и подбой пути при одном путевом стопоре, при этом даже логические затраты могут быть существенно сокращены в сравнении с прежде разделенным на этапы ходом работ.
Предпочтительное усовершенствование путевого измерителя при использовании вышеуказанного преимущества обеспечивает неограниченное функциональное использование при комфортабельной ездовой кабине. Усовершенствование обеспечивает быстрое функциональное использование вспомогательной каретки для создания лазерной базовой линии на камеру, закрепленную на измерительной тележке.
Дистанционный вариант решения такого тягового крюка обеспечивает при исключении связанного с нарушением безопасности покидания машины очень быстрое отделение непосредственно после достижения места производства работ.
По приведенным признакам рама измерителя с геометрическим замыканием может быть соединена с буксой, благодаря чему исключается влияние амортизации ходового механизма на результаты измерения.
Приведенные признаки обеспечивают улучшение результатов измерения, причем рабочие этапы, необходимые для проведения измерений, большей частью осуществляются дистанционно.
Целесообразное усовершенствование в сочетании с выявлением разницы между истинным и заданным состоянием пути обеспечивает точную привязку лазерного излучателя к зафиксированной точке пути.
Эти признаки приводят целесообразным способом к уменьшенным стрелам подъема при достижении более точных результатов измерений.
Еще одно усовершенствование путевого измерителя обеспечивает беспроблемное и быстрое крепление вспомогательной каретки под выступающей рамой измерителя, благодаря чему измеритель беспрепятственно сочленяется с поезной системой.
Усовершенствование обеспечивает транспортировку вспомогательной каретки на раме измерителя, при этом с помощью рампы гарантируется быстрый перевод вспомогательной каретки из передаточного положения в рабочее.
При помощи установки, составленной из предпочтительного и предлагаемого измерителей, работы, производимые ранее в два отдельных рабочих этапа, а именно промер и побивка пути, могут осуществляться за один рабочий этап при достижении особо экономичных и конструктивных преимуществ. Вся работа с особой экономической целесообразностью требует лишь одноразового стопорения, причем вследствие всеобщего настроечного передвижения, а также малой габаритной высоты путевого измерителя его конструктивное упрощение прежде всего состоит во вспомогательном электродвигателе, необходимом лишь при малых рабочих скоростях, а также в простой рабочей кабине. Логические затраты на точное по времени согласования различных этапов также существенно сокращаются по сравнению с известными решениями. Наконец, преимущество имеет и исключение конфликтов интересов, когда измерительные и подбойные работы осуществляются одним и тем же предпринимателем.
На фиг. 1 представлен вид сбоку путевого измерителя, состыкованного с частично показанной подбойной машиной, с опирающейся на него вспомогательной кареткой; на фиг. 2 частичный вид сверху на путевой измеритель; на фиг. 3 схематическое представление еще одного примера исполнения путевого измерителя.
Путевой измеритель 1 (фиг.1) имеет раму 2 ходовой части с плоскостью 3 рамы, проходящей параллельно базовой плоскости, образованной базовыми точками 4 колес ходового механизма 5. Эта параллельность имеет место в нормальном случае, когда рессоры обоих ходовых механизмов 5 нагружены одинаково. На плоскости рамы 3 в области задней части 6 машины располагаются двигатель внутреннего сгорания 7. Перед ним (обозначено стрелкой 8) в рабочем направлении путевого измерителя 1 располагается ездовая кабина 9 с управляющим устройством 10. Ездовая кабина 9 размещается в выемке 11 рамы 2 измерителя. Верхние линии 12 контуров, образованных двигателем 7 и ездовой кабиной 9, расположены под ограничительной плоскостью 13, которая к базовой плоскости, образованной базовыми точками 4 колес ходового механизма 5 или соответственно к плоскости 3 рамы, наклонена под углом α от 5 до 10о. При этом ограничительная плоскость 13 с плоскостью 3 рамы образует на конце путевого измерителя 1, переднем в направлении работы, линию пересечения 14, проходящую перпендикулярно продольному направлению машины и параллельно плоскости рамы или базовой плоскости. Путевой измеритель 1 может независимо перемещаться с помощью собственного привода 52 движения.
Под плоскостью 3 рамы и непосредственно перед передним ходовым механизмом 5 расположена имеющая бандажные колеса 15 измерительная тележка 16, вертикально перемещаемая с помощью привода и соединенная с рамой 2 измерителя. На ней установлены лазерный приемник 17 с СС-матричной камерой, измеритель 18 поперечного наклона, а также две противоположных друг другу в поперечном относительно машины направлении видеокамеры 19 для видеотехнического зондирования, находящегося в зоне каждого бандажного колеса 15 участка пути. Лазерный приемник 17 установлен на измерительной тележке 16 с возможностью перемещения по вертикали и в поперечном направлении при помощи привода 20. Сюда же, кроме того, относится и измеритель 21 пути с зондирующим роликом, прокатывающимся по головке рельса.
Длина рамы 2 измерителя, выступающей за передний ходовой механизм 5, больше суммарной длины вспомогательной каретки 22. Она с помощью оснащенного приводом устройства 23 может быть поднята с пути и может соединяться с передним концом рамы 2 измерителя. Как показано штрихпунктирными линиями, во время передвижения вспомогательной каретки 22 находится в выступающем за передний ходовой механизм 5 участок рамы 2 измерителя, благодаря чему он беспрепятственно может подсоединяться к другой машине.
Непосредственно перед работой тяговый крюк 30 установки 31 дистанционно расцепляют, и путевой измеритель 1 вместе со вспомогательной кареткой 22 отводят на сто-двести метров от подбойной машины 32 по пути 24. Как только достигается подлежащий измерению участок пути, выдвижение путевого измерителя 1, вспомогательная каретка 22 отцепляется от устройства 23 и соответственно от рамы 2 и опускается на путь 24. Затем вспомогательная каретка 22 выдвигается до ближайшей зафиксированной точки пути и позиционируется по цветной маркировке на рельсах. После этого измеряются истинные расстояния и высота пути 24 относительно фиксированной точки пути. Зарегистрированные данные по радио передаются на путевой измеритель 1. После такого измерения у фиксированной точки пути вспомогательная каретка 22 выдвигаются еще на 5-10 м и там останавливается. Лазерный излучатель 27 настраивается на лазерный приемник 17, который между тем вместе с измерительной тележкой 16 был опущен на путь 24. При помощи подходящего механического стопора вспомогательная каретка 22 фиксируется на рельсах пути так, что отвод из-за проходящих поездов исключается. Во время измерения через соответствующий мобильный радиоприбор осуществляется радиосвязь между персоналом, обслуживающим вспомогательную каретку 22 путевого измерителя 12 и экипажем подбойной машины 32.
После настройки лазерного излучателя 27 и приемника 17 путевой измеритель 1 начинает измерения участка пути, находящегося между путевым измерителем 1 и вспомогательной кареткой 22. При помощи ССД-матричной камеры, находящейся в лазерном приемнике 17, одновременно измеряются высота и направление. При превышению колеи позиции лазерного приемника 17 и регулировочных путей, а также пройденного пути, измеренного устройством 21 измерения пути, на заданном расстоянии рассчитываются соответствующие истинные стрелы подъема. Расчет начинается лишь тогда, когда путевой измеритель 1 оказывается непосредственно перед фиксированной точкой пути, у которой находится вспомогательная каретка 22, и останавливается строго по отношению к этой точке. Только тогда любое положение хорды, образованной лазерным излучателем 27, может компьютерным путем пересчитано на теоретическую хорду, положенную в основу заданных стрел подъема.
Во время этого расчета вспомогательная каретка 22 может вновь при помощи собственного вспомогательного двигателя 25 выдвигаться к ближайшей фиксированной точке пути. После расчета истинных стрел подъема они сравниваются с находящимися в памяти заданными стрелами подъема и выявляются соответствующие величины корректировки смещений и подъемов. Эти корректировочные данные с помощью радиоустройства 36 передаются в центральное управляющее устройство 37 подбойной машины 32 и могут в нем или в автоматически управляемом компьютере подвергаться дальнейшей обработке для соответствующего управления приводами путеподъемного или рихтовочного агрегатов.
Лазерный луч, созданный в излучателе 27, не расщепляется, а в виде круглого в сечении луча направляется на приемник 17. При приеме это дает преимущество повышенной интенсивности, чем обеспечивается надежный прием. Возможность смещения лазерного излучателя 27 с помощью устройства 28 поперечного движения дает то преимущество, что для приемника 17 это приводит к меньшим стрелам подъема. При его помощи прочие косые положения лазерной хорды должны регулироваться в большой области.
Под ССD-матричной камерой лазерного приемника 17 понимается YZ-регулировочное устройство (поперечная настройка Y, вертикальная настройка Z). Так как активная приемная поверхность камеры для необходимой области приема слишком мала, нужна соответствующая регулировка. Это непрерывно осуществляется компьютером и соответствующим блоком настройки. При этом область регулировки Z составляет 500 мм, область регулировки Y-1000 мм. Позиция камеры на регулировочном блоке измеряется абсолютным энкодером. Лазерная точка через матовое стекло и оптику проектируется на CCD-камеру и его положение рассчитывается компьютером по соответствующей программе и передается на основной компьютер 36 путевого измерителя. Благодаря двум находящимся на измерительной тележке 16 видеокамеры 19 имеется возможность осуществлять с помощью созданного в ездовой кабине 9 мониторного изображения точное позиционирование путевого измерителя 1 относительно соответствующей фиксированной точки пути. Это происходит посредством позиционирования середины колеса измерительной тележки 16 по цветовой маркировке, нанесенной на головку и шейку рельса. Образованная бандажными колесами 15 измерительная ось одновременно выполнена как телескопическая ось, чтобы можно было измерять колею.
По окончании работы трехсекционная установка 31 соединяется в машинную систему за счет того, что вспомогательная каретка 22 устройством 23 соединяется с передней машинной частью путевого измерителя 1, а сам путевой измеритель 1 тяговым крючком 30 подсоединяется к подбойной машине 32. Благодаря беспрепятственному обзору над путевым измерителем 1 обслуживающий персонал может без затруднений вести установку из ездовой кабины 34 в направлении стрелки 8.
Вариант другого путевого измерителя (фиг.3) 39 имеет опирающуюся на ходовые механизмы 40 раму 42 с плоскостью 41, с проходящей параллельно плоскости пути. На заднем по направлению конце рамы 42 измерителя располагается центральное управляющее устройство 43 с сиденьем 44. Сразу перед ним находится место хранения независимо перемещаемой вспомогательной каретки 45. Она может перемещаться по проходящим вдоль машины и соединенным с рамой 42 рельсам 46 и по рампе 47, расположенной в передней концевой области рамы измерителя, на путь 48 (штрихпунктирные линии). Пpи передвижении и работе рампа 47 при помощи привода может возвращаться в исходное положение, в котором она располагается практически параллельно плоскости 41 рамы непосредственно над рамой 42 измерителя. Путевой измеритель 39 может перемещаться с помощью двигателя 49 и привода движения 50.
Ограничительная плоскость 51 составляет с плоскостью 41 рамы угол 8о. Расположенные на раме 42 измерителя вспомогательная каретка 45, управляющее устройство 43 и сиденье 44 находятся под этой ограничительной плоскостью 51 так, что с подбойной машины, присоединенной к концевой задней области, при всеобщем движении имеется беспрепятственный обзор пути.


Изобретение относится к путевым измерителям, предназначенным для выявления истинного состояния пути по отношению к заданному состоянию пути. Сущность: путевой измеритель содержит раму 2, опирающуюся на ходовые механизмы 5, плоскость 3 которой параллельна базовой плоскости, образованной опорными точками 4 колес, лазарный приемник 17, установленный на измерительной тележке 16, связанной с рамой 2 с возможностью вертикального и поперечного перемещения относительно этой тележки 16, вспомогательную каретку 22, разъемно закрепленную на раме 2, лазерный излучатель 27, установленный на каретке с возможностью вертикального и поперечного перемещения относительно нее. Высота путевого измерителя ограничена условной наклонной плоскостью, образующей с базовой плоскостью 13 в передней по ходу движения путеизмерителя его части угол наклона, равный 5 10°. Условная линия пересечения условной наклонной плоскости 13 и плоскости рамы параллельна базовой плоскости и перпендикулярна продольному направлению движения путевого измерителя.10 з.п. ф-лы, 3 ил.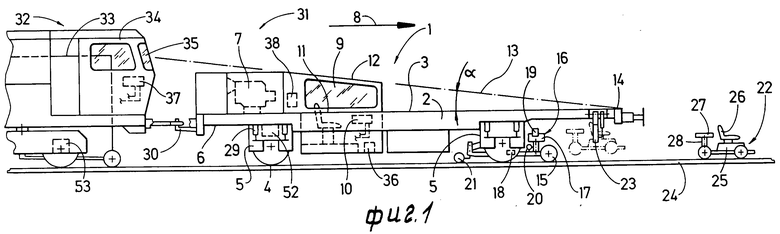
| Журнал "Eibenbahntechnische Rundschau", N 39, 1990 г., 4 тетрадь, с.201-211. |

