Изобретение относится к управлению электрическими машинами и может использоваться в системах управления с шаговыми двигателями.
Цель изобретения состоит в улучшении динамических характеристик двигателя.
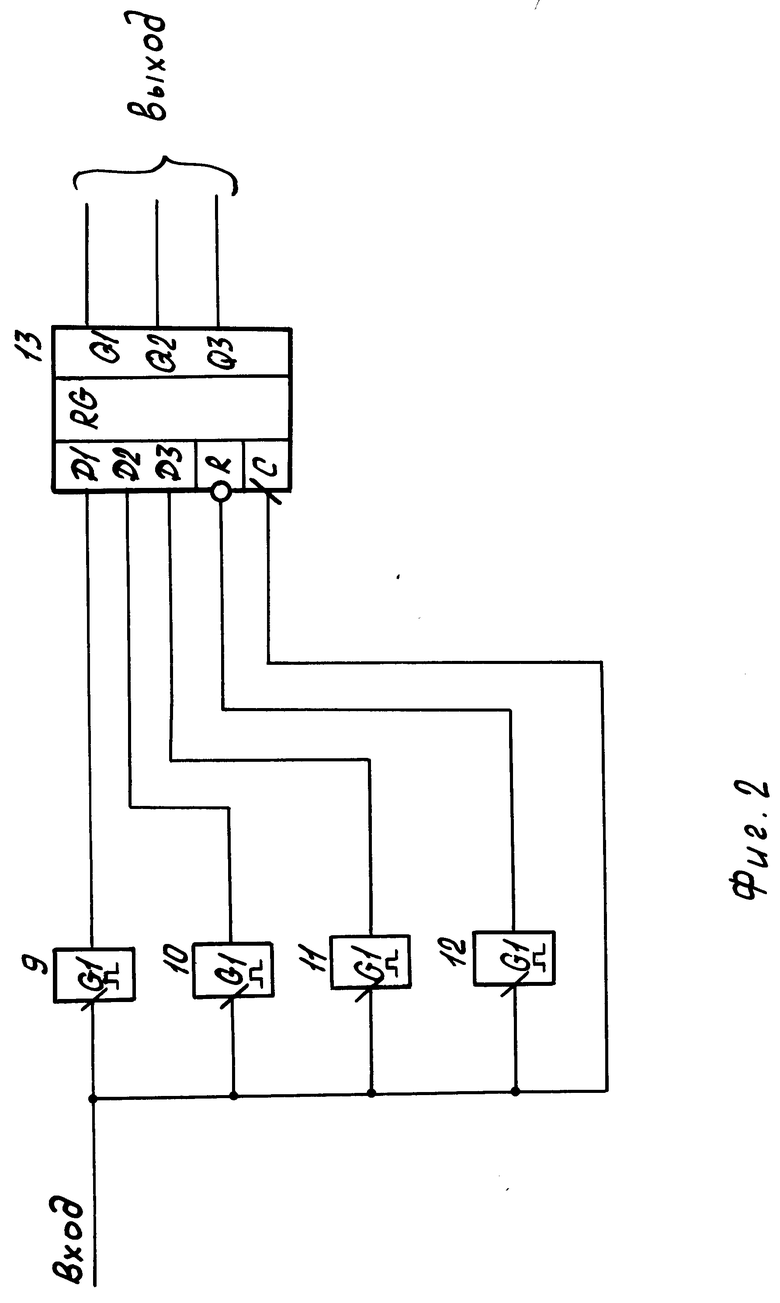
На фиг. 1 показана функциональная схема устройства; на фиг. 2 схема блока контроля скорости.
К входу запоминающего устройства 1 подключены выходы датчика положения ротора 2, шина задания режима 3 и выходы блока 4 контроля скорости. Вход блока 4 контроля скорости подключен к выходу запоминающего устройства 1. Остальные выходы запоминающего устройства 1 соединены с информационными входами Д-триггеров 5. Синхронизирующие входы триггеров 5 соединены с выходами элемента И-НЕ 6, входы которого соединены с шиной тактовых импульсов и шиной режима. Выходы Д-триггеров соединены с входами усилителей 7, выходы которого соединены с фазами шагового двигателя 8. Вал шагового двигателя связан с датчиком положения ротора 2. Запоминающее устройство 1 запрограммировано так, что на выходах содержится информация о необходимости включения фаз в очередном такте в зависимости от текущего положения ротора двигателя, от заданного режима (пошаговый, непрерывный или торможение), направление движения и текущего значения скорости, поступающего в виде кода с блока 4 контроля скорости. На выходе запоминающего устройства, подключенном к входу блока 4 контроля скорости, уровень логического сигнала меняется при каждом шаге шагового двигателя.
Устройство содержит четыре эталонных одновибратора с перепуском 9-12 и регистр 13, причем выходы одновибраторов 9-1 подключены к информационным входам регистра, а выход одновибратора соединен с входом установки регистра в "0".
Устройство работает следующим образом. В режиме пошагового движения на вход элемента И-НЕ 6 подаются короткие импульсы уровнем логического нуля. На выходе элемента И-НЕ появляются единичные импульсы. С приходом импульсов на тактирующие входы Д-триггеров 5 происходит перезапись информации из запоминающего устройства 1 в триггеры. Шаговый двигатель поворачивается на заданный угол и на выходе датчика 2 положения ротора появляется новая комбинация. Соответственно появляется новая комбинация на выходах запоминающего устройства (ПЗУ) 1, которая перепишется в триггеры 5 с приходом следующего тактирующего импульса.
В режиме непрерывного вращения на вход элемента И-НЕ 6 подается непрерывный сигнал и информация на выходах триггеров 5 меняется сразу же после смены информации с датчика 2 положения ротора.
В начальный момент времени блок 4 контроля скорости имеет на своих выходах код, соответствующий низким оборотам, и запоминающее устройство задает закон коммутации y Х + 3, где х код положения ротора, y код положения вектора индукции.
По достижении скоростью вращения двигателя первого порога меняется код на выходе блока 4 и меняется закон коммутации. Коммутация обмоток происходит с опережением. С увеличением скорости увеличивается и опережение.
Информация об угле опережения хранится в ПЗУ, причем определенной скорости вращения соответствует определенный угол опережения. Блок 4 контроля скорости преобразует скорость перемещения ротора в трех четырех разрядный код, подаваемый в ПЗУ. Этот код производит выбор определенного угла опережения, соответствующий скорости вращения в режиме самокоммутации. ПЗУ запрограммировано так, что на выходе, подключенном к входу устройства контроля скорости, присутствует "1" при всех нечетных и "0" при всех четных положениях ротора. Таким образом, уровень сигнала на этом выходе ПЗУ меняется с "1" на "0" или с "0" на "1" при каждом шаге двигателя, а период следования импульсов равен времени отработки двух шагов двигателя. Блок 4 контроля скорости преобразует период следования импульсов или длительность импульсов, или длительность паузы между импульсами в цифровой код.
Для этого один из указанных интервалов сравнивается с длительностью импульсов на выходах одновибраторов 9-12. Если до прихода очередного импульса происходит перезапуск одновибратора 12, то сброс кода в резисторе 13 не происходит.
При торможении двигателя меняется код на выходе запоминающего устройства 1 и происходит коммутация фаз, обеспечивающая наибольший момент, направленный в сторону, противоположную вращению с учетом необходимого опережения. При падении частоты коммутации фаз ниже частоты приемистости код с выхода блока 4 контроля скорости переключает запоминающее устройство на коммутацию фаз по закону yХ и происходит остановка двигателя. При необходимости обеспечить точный подвод рабочего органа к заданной точке, после снижения скорости вращения двигателя можно перейти на пошаговый режим, что задается определенным кодом шины 3.
Разгон двигателя происходит с оптимальным углом коммутации.
Данное устройство по сравнению с известными менее критично к скорости нарастания тока в обмотках, что допускает применение более простых усилителей с меньшим напряжением питания, а следовательно, более надежных.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1987 |
|
SU1480079A1 |
| Устройство для управления шаговым электродвигателем | 1987 |
|
SU1520647A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU904182A2 |
| Шаговый электропривод | 1986 |
|
SU1367126A1 |
| Устройство для управления шаговым двигателем в режиме самокоммутации | 1983 |
|
SU1167689A1 |
| Устройство для управления шаговымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU813656A1 |
| Устройство для управления группой шаговых электродвигателей | 1981 |
|
SU1073871A2 |
| Способ управления шаговым двигателем в режиме самокоммутации и устройство для его осуществления | 1983 |
|
SU1124419A1 |
| Дискретный электропривод со стабилизацией скорости | 1983 |
|
SU1108601A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
Изобретение относится к электротехнике и может использоваться в системах автоматического управления с шаговыми двигателями. Цель изобретения состоит в улучшении динамических характеристик двигателя. Устройство обеспечивает упраление шаговым двигателем как в пошаговом режиме, так и в режиме самокоммутации, причем в режиме самокоммутации обеспечивается увеличение угла коммутации с ростом скорости. Устройство управления содержит датчик 2 положения ротора, элемент памяти на D-триггерах 5, постоянное запоминающее устройство 1, блок 4 контроля скорости, выходы которого соединены с выходами запоминающего устройства. 2 ил.
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ с датчиком положения ротора, содержащее D-триггеры по числу фаз, входы синхронизации которых связаны с источником импульсов через элемент И НЕ, постоянное запоминающее устройство, адресные входы которого соединены с выходами датчика положения ротора и с шинами выбора направления и режима коммутации, а выходы соединены с информационными входами D-триггеров, выходы которых подключены к входам усилителей мощности, отличающееся тем, что, с целью улучшения динамических характеристик двигателя, введен блок контроля скорости, изменяющий код на своих выходах в зависимости от периода коммутации фаз, вход которого соединен с дополнительным выходом постоянного запоминающего устройства, а выходы с дополнительными адресными входами последнего.
| Устройство для управления шаговымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU813656A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
