(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ
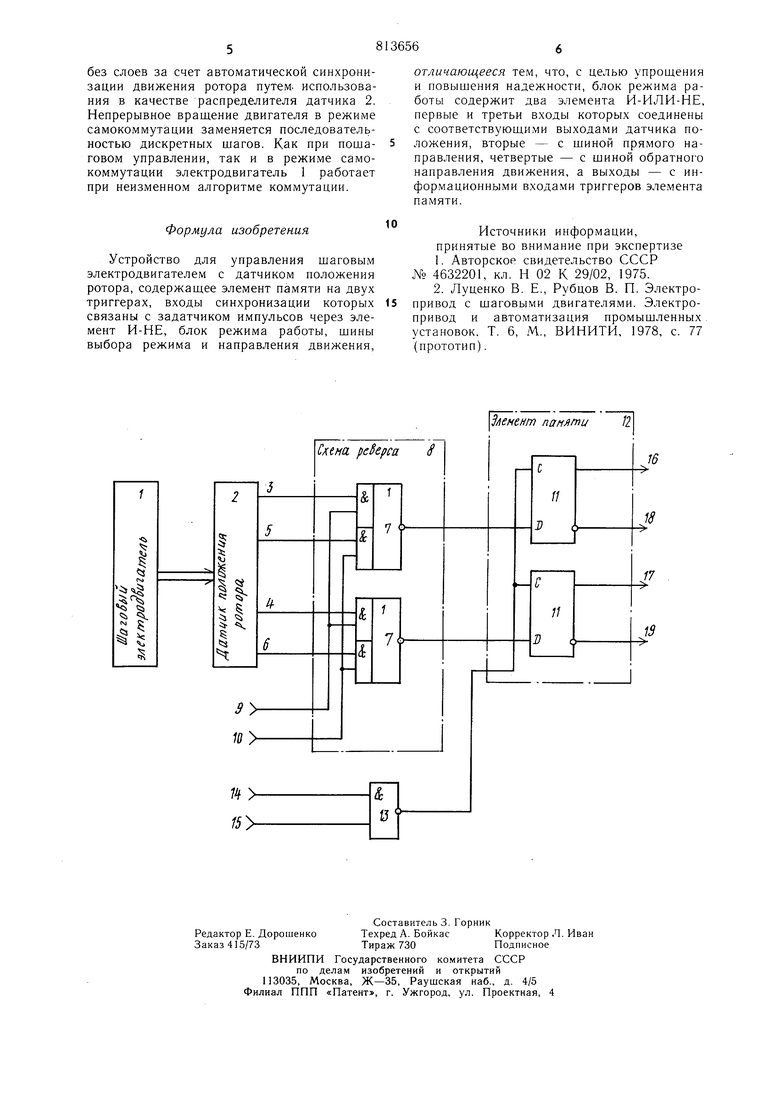
На чертеже приведена функциональная схема устройства для управления четыре.хобмоточным шаговым электродвигателем.
Схема содержит электродвигатель 1, ротор которого сопрягается с кодовым диском датчика 2 положения ротора, например фотоэлектрического типа. На кодовом диске нанесены чередующиеся между собой прозрачные и непрозрачные секторы, каждый из которых имеет протяженность, соответствующую половине периода пространственной кривой синхронизирующего мо.мента электродвигателя 1. Осветители и фотоприемники (не показаны) размещены по разные стороны от диска. Фотоприе.мники смещены по дуге друг относительно друга на четверть периода пространственной кривой синхронизирующего момента электродвигателя 1. Они расположены так, что при вращении ротора и связанного с ним кодового диска в прямом направлении непрозрачные секторы последовательно перекрывают фотоприемники, соединенные соответственно с выходами 3, 4, 5 и 6 датчика 2.
Выходы 3, 4, 5 и 6 датчика 2 соединены с первыми и третьи.ми входами логических . элементов И-ИЛИ-НЕ 7 блока 8 режима работы. Вторые и четвертые входы элементов 7 соединены соответственно с щинами прямого 9 и обратного 10 направлений движения. Выходы блока 8 режима работы соединены с информационными входами D триггеров 11, тактируе.мых уровпе.м. Элемент 12 памяти включает в себя два триггера 11. Входы синхронизации триггеров И объединены и связаны через .логический эле.мент И-НЕ 13 с И1иной 14 тактов и тиной 15 выбора режима. Прямые и инверсные выходы триггеров 11 соединены с выходными щинами 16, 17, 18 и 19.
Устройство работает следующ | м образом Принимаем, что на шипу 9 подан потенциал ло|-ической «1, а на щипы 10 и 15 -логического «О. При этом логическая «1 поступает на вторые входы элементов 7 и входы синхронизации триггеров 11, разрешая прохождение сигналов с выходов 3 и 4 датчика 2 через блок 8 режима работы и элемент 12 памяти на выходные щины 16, 17, 18 и 19 устройства. Если ротор электродвигателя 1 находится в юложении, при котором на выходах 3 и 4 датчика 2 устанавливаются потенциалы логического «О, то на выходных щинах 16, 17, 18 и 19 одновременно устанавливается комбинация логических сигналов 1100. При это.м обеспечивается включение обмоток управления двигателя (не показаны), приводящее к перемещению ротора электродвигателя 1 и связанного с ним датчика 2 в прямом паправлении. Пере.мещение последнего приводит к изменению потенциала на выходе 3 датчика 2.
Новая комбинация логических сигналов на выходах 3 и 4 вызывает появление на
ВЫХОДНЫХ типах 16, 17, 18 и 19 комбинации логических сигналов 0110. При этом включаются обмотки управления электродвигателя 1, обеспечивающие дальнейшее движение его ротора в прямом направлении. Последуюп;ая работа устройства при движении в пря.мом направлении происходит аналогично описанному. На выходах 3 и 4 датчика 2 происходит следующая смена ко.мбинаций логических сигналов 00-10-11-01-00 и т. д., а на выходных щинах 16, 17, и 19 - 1100-0110-0011-1001 и т. д., что соответствует вращению ротора электродвигателя 1 при парной коммутации в прямом направлении.
Если потенциалы на щинах 9 и 10 направлений смепить на обратные, то потенциал логической «1 щины 10 разрещает прохождение сигналов с выходов 6 и 5 датчика 2 через блок 8 выбора режима. Это эквивалентно развороту кодового диска датчика 2 относительно ротора электродвигателя 1 на угол, равный иоловине периода пространственной кривой синхронизирующего .момента, и ведет к смене знака враП1,ающего момента, приложенного к ротору электродвигателя. В результате происходит
5 изменение направления вращения ротора электродвигателя 1 и на выходах 5 и 6 датчика 2 устанавливается смена ко.мбинаций ./гогических сигналов 00-01-11-10-00 и т. д., а на выходных шинах 16, 17, 18 и 19 - 1100-1001-0001-0110-1100 и т. д.
Для остановки электродвигателя 1 достаточно подать на шинь 14 и 15 потенциал логической «1. При этом па входы синхропизации триггеров 11 поступает логический «О. В элементе 12 памяти фиксируется по5 следпяя комбинация сигналов. Включение обмоток управления э;1ектродвигателя 1 остается постоянным независимо от сигналов с датчика 2. Остановка электродвигателя 1 может осуществляться также подачей на гпины 9 и to одинаковых потенциалов (либо
0 логических «О, либо «1).
При реализации режима пошагового управления на шины 9 и 10 направлений подается комбинация потенциалов, соответствующая требуемому направлению движения, на щину 15 - потенциал логического «О, а на шину 14 тактов - последовательность коротких отрицательных и.мпульсов от задатчика и.мпульсов (не показан). В этом режиме информация от датчика 2 проходит на выход {ые шины 16, 17, 18 и 19
0 не сразу, а лишь при поступлении очередного тактового импульса. В промежутках между импульса..ми информация на выходных шинах 16, 17, 18 и 19 не из.меняется и, если пошаговому управлению предшествует режим самоко.ммутации, то в эти промежутки
тор.можение ротора электродвигателя 1. Поэтому переход с режима са.моко.ммутации на пошаговое управление (с более низкой частотой вращения) ос ществляется плавно,
без слоев за счет автоматической синхронизации движения ротора путем, использования в качестве распределителя датчика 2. Непрерывное вращение двигателя в режиме самокоммутации заменяется последовательностью дискретных шагов. Как при пошаговом управлении, так и в режиме самокоммутации электродвигатель 1 работает при неизменном алгоритме коммутации.
Формула изобретения
Устройство для управления шаговым электродвигателем с датчиком положения ротора, содержащее элемент памяти на двух триггерах, входы синхронизации которых связаны с задатчиком импульсов через элемент И-НЕ, блок режима работы, щины выбора режима и направления движения.
отличающееся тем, что, с целью упрощения и повышения надежности, блок режима работы содержит два элемента И-ИЛИ-НЕ, первые и третьи входы которых соединены с соответствующими выходами датчика положения, вторые - с шиной прямого направления, четвертые - с шиной обратного направления движения, а выходы - с информационными входами триггеров элемента памяти.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 4632201, кл. Н 02 К 29/02, 1975.
2.Луценко В. Е., Рубцов В. П. Электропривод с шаговыми двигателями. Электропривод и автоматизация промыщленных. установок. Т. 6, М., ВИНИТИ, 1978, с. 77 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реверсивным бесконтактным электродвигателем постоянного тока | 1976 |
|
SU628597A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU904182A2 |
| Способ управления шаговым двигателем в режиме самокоммутации и устройство для его осуществления | 1983 |
|
SU1124419A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1989 |
|
RU2041559C1 |
| Устройство для управления шаговым электродвигателем | 1987 |
|
SU1520647A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Устройство для управления шестифазнымшАгОВыМ элЕКТРОдВигАТЕлЕМ | 1979 |
|
SU811478A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1480079A1 |
| Устройство для программного управления шаговым двигателем | 1986 |
|
SU1352463A1 |
3ленент памяти
