2. Устройство для управления шаговым двигателем в режиме самокоммута ции, содержащее мыогоканальмь1й усилитель мощности, подключенный выходами к фазам двигателя, а входами связанный с выходами кодового датчика положения, расположенного на валу двигателя, и блок регулирования угла коммутации, отличающееся тем, что, с целью расширения функциональных возможностей, блок регулирования угла коммутации
снаржен ц сумматорами и п блоками ключей, соединенных сигнальными входами с выходами кодового датчика и с первыми входами первого сумматора, соединенного вторыми входами с выходами ключей первого блока, причем первые входы каждого последующего сумматора соединены с выходами предыдущего, вторые входы - с выходами соответствующего блока ключей, а выходы сумматора соединены с входами усилителя мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реверсивным бесконтактным электродвигателем постоянного тока | 1976 |
|
SU628597A1 |
| Устройство для управления шаговымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU813656A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1480079A1 |
| Устройство для управления шаговым электродвигателем | 1987 |
|
SU1520647A1 |
| Замкнутый шаговый электропривод | 1988 |
|
SU1511840A2 |
| Шаговый электропривод | 1986 |
|
SU1367126A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1989 |
|
RU2041559C1 |
| Устройство для управления шаговым двигателем в режиме самокоммутации | 1983 |
|
SU1167689A1 |
| Способ управления шаговым двигателем и устройство для его осуществления | 1985 |
|
SU1310993A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 2011 |
|
RU2516528C2 |
1. Способ управления шаговым двигателем в режиме самокоммутации путем подачи иа многоканальный усилитель мощности, коммутирующий фазы двигателя, сигналов от кодового датчика положения ротора двигателя, отличающийся тем, что, с целью регулирования угла коммутации, производят суммирование сигнала кодового датчика с этим же сигналом несколько раз - по числу фнкснрсванн||ас значений угла коммутации, а результирующий сигнал подают на входы усилителя мощности.
Изобретение относится к области ; злектротехники .и может быть использовано, например, и многоканальных системах управления устройств автоматики, телемеханики и в станках с программным управлением.
Известен способ управления шаговым двигателем в режиме самокоммутации путем подачи на многоканальный усилитель мощности, коммутирукнций ч фазы двигателя, сигналов параллельного кода от датчика положения П
kb- -. звестно также устройство для управления шаговым двигателем в режиме самокомнутации, содержащее tmotoканальный усилитель мощности, подключенный выходами к фазан двигателя, а входами - к выходам датчика положения ротора lyj .
Недостатком зтого способа и уст- , ройства является ограниченная возможность изменения угла коммутации фаз двигателя, что не позволяет получить оптимальные характеристики дйигателя при пуске, торможении и реверсе.
Наиболее близким по технической сущности и достигаемому результату является способ управления шаговым двигателем в режиме самокоммутации путем подачи на многоканальный усилитель мощности, коммутирующий фазы двигателя, сигналов от кодового датчика положения ротора двигателя
Известно также устройство для ; управления шаговым двигателем, реализующее указанный способ, содержащее многоканальный усилитель мощности.
подключенный выходами in фазам двигателя, а входами связанный с выходами кодового датчика положения, расположенного на валу двнгателя, и блок регулирования угла коммутации Щ
Недостатками указанных способов и устройства являются ограниченные функциональныевозможности, обусловленные применением непрограммируемых логических элементов, и низкая надежность, ввиду применения большого числа логических элементов.
Цель изобретения - регулирование угла коммутации и расширение функциональных возможностей регулирования угла коммутации путем использования программно-управляемой системы.
Поставленная цель достигается тем, что согласно способу управления шаговым двигателем в режиме самокомиутации путем подачи на многоканальный усилитель мощности, коммутирующий фазы двигателя, сигналов от кодового датчика положения ротора двигателя, производят суммирование сигналов кодового датчика с этим же сигналом несколько раз по числу фиксированных значений угла коммутации, а-результирующий сигнал подают на входы усилителя мощности.
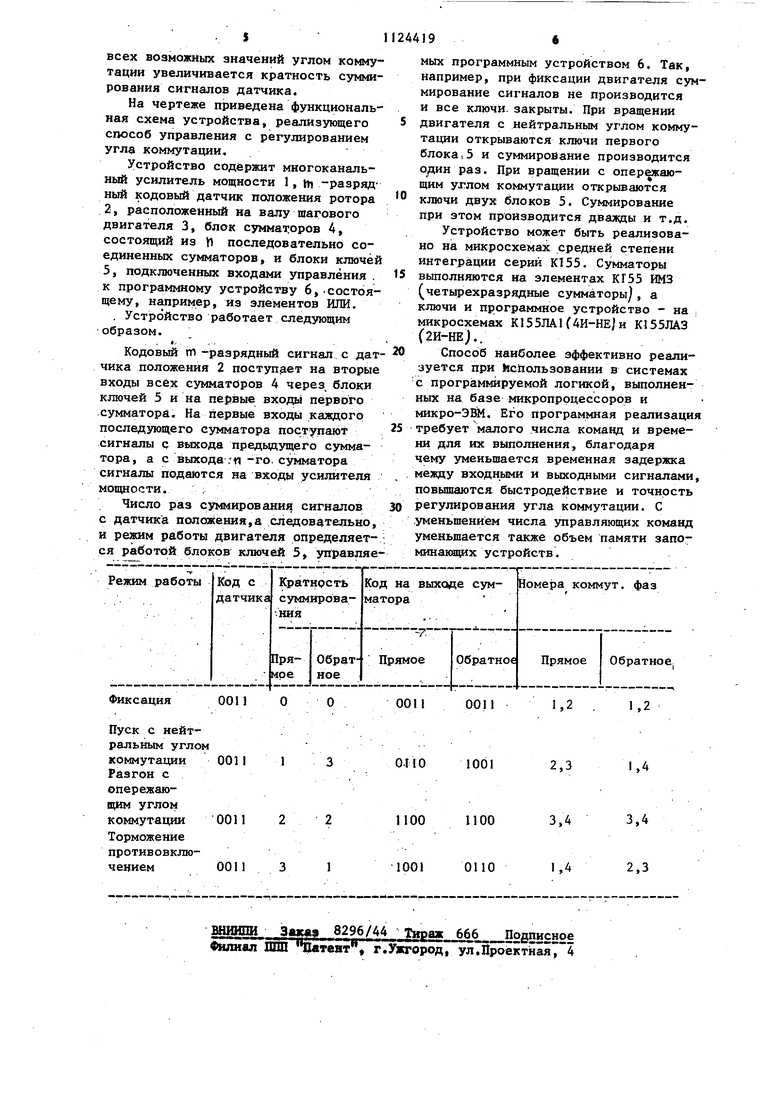
Кроме того, в устройстве для управления шаговым двигателем в режиме самокоммутации, сьдержащем многоканальный усилитель мощности, подключенный выходами к фазам двигателя, а входами связанный с выходами кодового датчика положения, расположенного на валу двигателя, и блок регулирования угла коммутации, последний снабжен v сумматорами и Нблоками ключей, соединенных сигнальными входами с вьпсодами кодового дат чика, и с первыми входами первого сумматора, соединенного вторыми входами с выходами ключей первого блока,причем первые входы каждого последующего сумматора соединены с выходами предьщущего, вторые входы - с вьпсодами соответствующего блока ключей, а выходы h -го суммато ра соединены с входами усилителя мощности. Способ рассмотрим на примере управления четырехфазным шаговым двига телем при парной коммутации его фаз Датчик положения ротора ориентирован таким образом, что в режиме фиксации при возбуждении определенных фаз двигателя на его выходах вырабатывается 4- разрядный код, приведенный ниже. Номера возбужден- Код сигнала, посту ных фаз двигателя пающего с датчика Суммирование производится таким образом, что.в случае переполнения сумматора (появление единицы в разря де переноса) единица переносится в младший разряд. Многократное суммирование, а их чцрло определяется числом фиксированных значений угла коммутации, позволяет получить требуемое значений кода и соответствующий ему угол коммутации фаз дви гателя . При возбуждении фаз 1,2 с датчик постудает код 0011, который после . суммирования преобразуется в код 0110(0011+0011 0110). , При формировании на выходе сумматора сигнала, соответствующего этому коду, возбуждаются фазы 2,3,что соответствует вращению двигателя с нейтральным углом коммутации. На втором шаге с датчика поступа ет .код 0110, который после суммирования преобразуется в код 1100(0110 +0110 1100). Под воздействием сигна ла, соответствующему этому коду, возбуждаются фазы 3,4 и двигатель выполняет следующий шаг; При выполнении третьегб шага с датчика поступает код 1100. Его суммирование производится с переносом единицы из старшего пятого раэрй|да в младший, в результате на выходах сумматора формируется код lOOl Ц100+П00 100|) , при этом возбуждаются фазы 4 и II. При суммировании кода 1001 получаем код 0011(1001+1001 0011), при этом возбуждаются фазы 1,2. После выполнения двигателем 4 шагов процесс коммутации обмоток повторяется и двигатель непрерывно вращается с нейтральным углом коь1мутации. Для перевода двигателя в режим ускоренного вращения с опережающим углом коммутации производится двукратное суммирование сигнала датчика положения. Например, при поступлении кода 0011 после двукратного суммирования получим код 1100(0011+0011 0110, 0110+0110 1100). Этот сигнал возбуждает обмотки 3 и 4, обеспечивая опережающую коммутацию фаз двигателя. Для перевода двигателя из этого режима работы в режим генераторного торможения производится трехкратное суммирование кодового сигнала датчика (рОП+001 10,01 10+01 100, I100+1100 00l). При появлении на выходе сумматора кода 1001 коммутируются фазы 4 и 1, что вызывает торможение ротора. При вращении двигателя в обратном направлении (реверсе) число операций суммирования при вращении с нейтральньм углом коммутации равно трем с опережающим углом - двум, а при торможении - одному.. Результаты примера преобразования кода при изменении режима р аботы 4- фазного двигателя сведены в таблице,Аналогичным образом изменение режима работы двигателя осуществляется и при поочередной коммутации фаз. Коды сигналов с датчика в этом случйе нмеют вид ООН, 0010, 0100, 1000. Способ может быть применен для управлений двигателем с любым числок фаз. С ростом числа-фаз увеличивается число возможных фиксированных значений углов коммутации. Для получения всех возможных значений углом коммутации увеличивается кратность сзгммирования сигналов датчика. На чертеже приведена функциональная схема устройства, реализующего способ управления с регулированием угла коммутации. Устройство содержит многоканальный усилитель мощности 1, HI -разрядный кодовый датчик положения ротора 2, расположенный на валу шагового двигателя 3, блок сумматоров 4, состоящий из последовательно соединенных сумматоров, и блоки ключей 5, подключенных входами управления . к программному устройству 6, .состоящему, например, из элементов ИЛИ. . Устройство работает следующим образом. Кодовый m -разрядный сигнал с дат чика положения 2 поступает на вторые входы всех сумматоров 4 через, блоки ключей 5 и на первые входы первого сумматора. На йервые входы каждого последующего сумматора поступают сигналы с выхода предыдущего сумматора, а с выхода .И -го. сумматора сигналы подаются на входы усилителя мощности. . Число раз суммирования сигналов с датчика пол(якения,а следовательно, и режим ра.боты двигателя определяется работой блоков ключей 5, уйравляе
О
ООП
Фиксация
1,2
1,2
ООП
00 1 мых программным устройством 6. Так, например, при фиксации двигателя суммирование сигналов не производится и все ключи, закрыты. При вращении двигателя с нейтральным углом коммутации открываются ключи первого блока 15 и суммирование производится один раз. При вращении с опережающим углом коммутации открываются ключи двух блоков 5. Суммирование при этом производится дважды и т.д. Устройство может быть реализовано на микросхемах средней степени интеграции серий КТ55. Сумматоры выполняются на элементах КГ55 ИМЗ (четырехразрядные сумматоры), а ключи и программное устройство - на микросхемах К155ЛА1(4И-НЕ; и К155ЛАЗ С2И-НЕ).. Способ наиболее эффективно реализуется при Использовании в системах с программируемой логикой, выполненных на базе микропроцессоров и микро-ЭШ. Его программная реализация требует малого числа команд и времени для их выполнения, благодаря чему уменьшается временная задержка между входными и выходными сигналами, повышаются быстродействие и точность регулирования угла коммутации. С .уменьшением числа управляющих команд уменьшается также объем памяти запоминающих устройств.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМБЕСКОНТАКТНЫМ ЭЛЕКТРОДВИГ/ХТЕЛЕМПОСТОЯННОГО ТОКА | 1972 |
|
SU425275A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Радиопередатчик | 1927 |
|
SU7679A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
