I
Изобретение относится к системам автоматического управления с шаговыми электродвигателями, обеспечивакш1ими управление электродвигателем как в режиме бесконтактного двигателя постоянного тока, так и в режиме пошагового управления.
По основному авт. св. № 813656 известно устройство для управления шаговым электродвигателем с датчиком положения ротора и управлением по шинам выбора режима работы и направления движения, содержащее элемент йамяти на двух триггерах, входы которых связаны с задатчиком импульсов через элемент И-ПЕ блока режима работы, включакнчего .также два логических элемента 2И-ИЛИ-НЕ, первые и третьи входы которых соеди-, нены с соответствующими выходами датчика положения ротора, вторые с шиной прямого направления, четвертые - с шиной обратного направления движения, а выходы - с информациoнны ai входами триггеров элемента памяти СП.
Известное устройство позволяет реализовать два способа управления шаговым электродвигателем с изменением направления движения. Недостатком этого устройства является неполное использование всех воз-, можностей шагового электродвигателя в режиме самокоммутации, что
10 снижает быстродействие.
Цель изобретения -. повышение быстродействия.
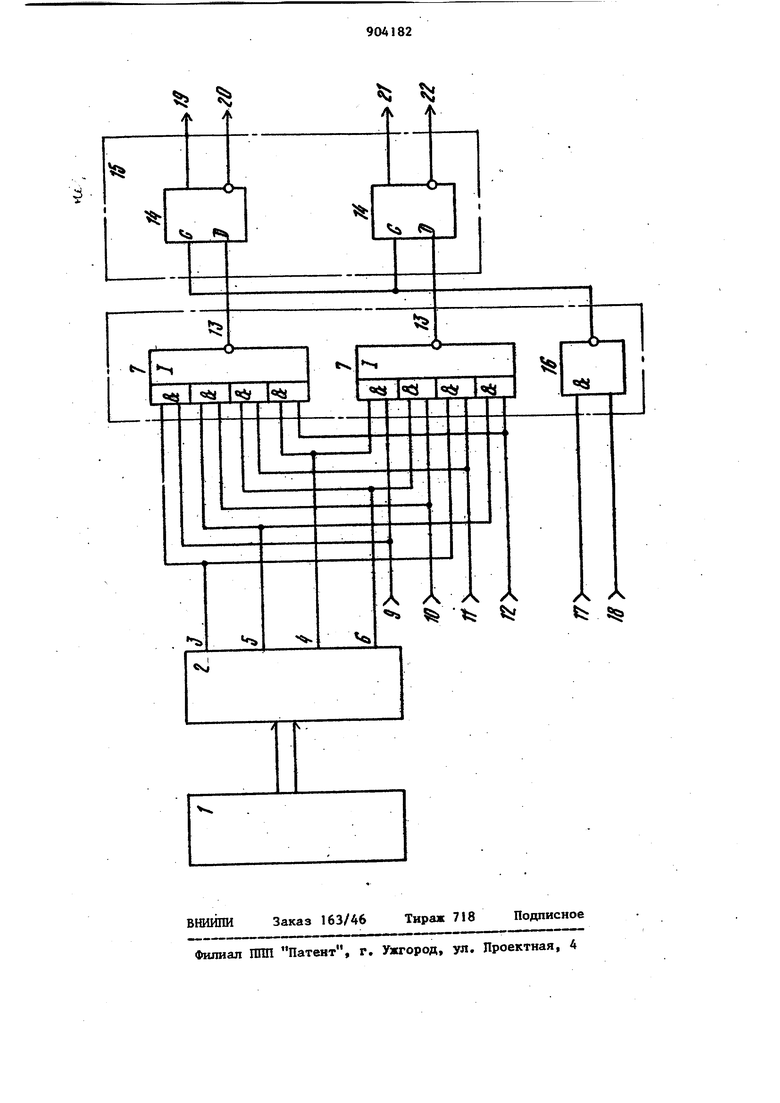
Указанная, цель достигается за счет введения щии режимов ускорен 5ного движения и торможения при самокоммута1Ц1и и снабжения блока режима работы двумя дополнительными логическими элементами 2И-ИЛИ-НЕ первые и третьи входы которых соеМдинены с соответствующими выходами положения ротора, вторые - с шиной ускоренного движения, четвертые с шиной торможения, а выходы - с выходами основных логических элементов 2И-ИЛИ-НЕ;. На чертеже приведена функциональ ная схема устройства для управления четырехобмоточным шаговым электродвигателем. Устройство содержит двигатель i с датчиком 2 положения ротора. Выходы 3-6 датчика 2 положения ротора соединены с соответствую1дими нечетными входами логических элементов 4И-ШШ-НЕ 7 блока 8 режима работы, образованных путем параллельного сор.гтиночия логических элементов 2И-ИЛИ-НЕ. Вторые и четвертые входы элементов 7 соединены соответственно с шинами прямого 9 и обратного 10 направлений движения. Шестые и восьмые входы элементов соединены соответственно с шиной ускоренного движения I1 и с шиной 12 торможенияо Выходы 13 блока 8 режима работы соединены с информаци онными входами Д-триггеров 14, такт руемых уровнем. Элемент 15 памяти включает в себя два триггера 14, вх ды синхронизации которых объединены и связаны через логический элемент И-КЕ 16 с шиной 17 тактов и шиной 18 выбора режима. Прямые и инверсные выходы триггеров 14 соединены с выходными шийами 19-22. Устройство работает следующим об разом. При подаче на шину 10 ускоренного движения и шину 11 торможения сигнала логического нуля и соответствующих сигналов на шины прямого 9 и обратного 10 направлений, тактов 17 и выбора режимов работы 18 реали зуется режим пошагового управления и реясим самокоммутации с нулевым уг лом коммутации. Для повышения скорости вращения в режиме самокоммутации (при этом на шину 18 выбора режима работы под сигнал логического нуля) на шины 9 и 10 подается сигнал логического нуля, а на шину 10 ускоренного движения - логической единицы. При это в блоке 8 режима работы происходит переко Мутация выходов датчика 2 по ложении ротора, обеспечиваящая на в ходных шинах 19-22 комбинацию сигналов для ускоренного вращения двигателя с опережаищим углом коммутации, равным 90, в том направлении, которое имеет двигатель 1 на момент подачи сигнала о переходе к данному режиму. Эффективное торможение двигателя в режиме самокоммутации достигается подачей на шину 12 торможения сигнала логической единицы, а на шины 9-П - логического нуля. Тем самым на выходных пшнах 19-22 формируется комбинация сигналов, соответствукмцая запаздывающей 90 коммутации. Развиваемый тормозной момент при этом не зависит от направления вращения двигателя , а только от модуля скорости, и при остановке ротор двигателя 1 приходит в положение, согласованное с полем статора. Применение устройства расширяет диапазон рабочих скоростей двигателя в среднем в 2 раза и улучшает динамические характеристики при торможении, что повышает быстродействие привода. Формула изобретения Устройство для управления шаговым электродвигателем по авт. св. № 813656, отличающееся тем, что, с целью повьш1ения быстродействия, введены шины режимов ускоренного движения и торможения при самокоммутации, а блок режима работы дополнительно содержит два логических элемента 2И-ИЛИ-НЕ, первые и третьи входы которых соединены с соответствую1Чими выходами датчика положения ротора, вторые с шиной ускоренного движения, четвертые - с шиной торможения, а выходы - с выходами основных логических элементов 2Й-ИЛИ-НЕу Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР № 813656 по заявке № 2766490/24-07, кл. Н 02 Р 8/00, 1979.
Ж
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реверсивным бесконтактным электродвигателем постоянного тока | 1976 |
|
SU628597A1 |
| Устройство для управления шаговымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU813656A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1989 |
|
RU2041559C1 |
| Устройство для управления шестифазнымшАгОВыМ элЕКТРОдВигАТЕлЕМ | 1979 |
|
SU811478A1 |
| Устройство для управления шаговым электродвигателем | 1987 |
|
SU1520647A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1480079A1 |
| Способ управления шаговым двигателем и устройство для его осуществления | 1985 |
|
SU1310993A1 |
| Способ управления шаговым двигателем в режиме самокоммутации и устройство для его осуществления | 1983 |
|
SU1124419A1 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| Способ торможения шагового электродвигателя и устройство для его осуществления | 1982 |
|
SU1032585A1 |
t:
t« I ;
г
1 1
«
А А
А А / /N
155 : S5
