ОО
а
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электропривод | 1986 |
|
SU1372585A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОТКАЗОВ В ШАГОВОМ ЭЛЕКТРОПРИВОДЕ | 1992 |
|
RU2037264C1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1989 |
|
SU1679595A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1403329A1 |
| Устройство для программного управления | 1986 |
|
SU1462246A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1997 |
|
RU2125762C1 |
| Способ управления шаговым двигателем и устройство для его осуществления | 1985 |
|
SU1310993A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
Изобретение относится к управлению электрическими машинами, к шаговым электроприводам, работающим в режиме самокоммутации. Цель состоит в расширении функциональных возможностей путем формирования требуемых механических характеристик. Электропривод содержит датчик момента 9, выход которого подключен к аналого-цифровому преобразователю 1, выходные коды которого с помощью двух функциональных преобразователей 2 и 3 преобразуются в коды начала и продолжительности диапазона включения фаз к источнику постоянного напряжения, что позволяет с большой точностью формировать требуемую механическую характеристику электропривода с шаговым двигателем регулированием только углового диапазона коммутаций фаз двигателя . 4 ил. sfi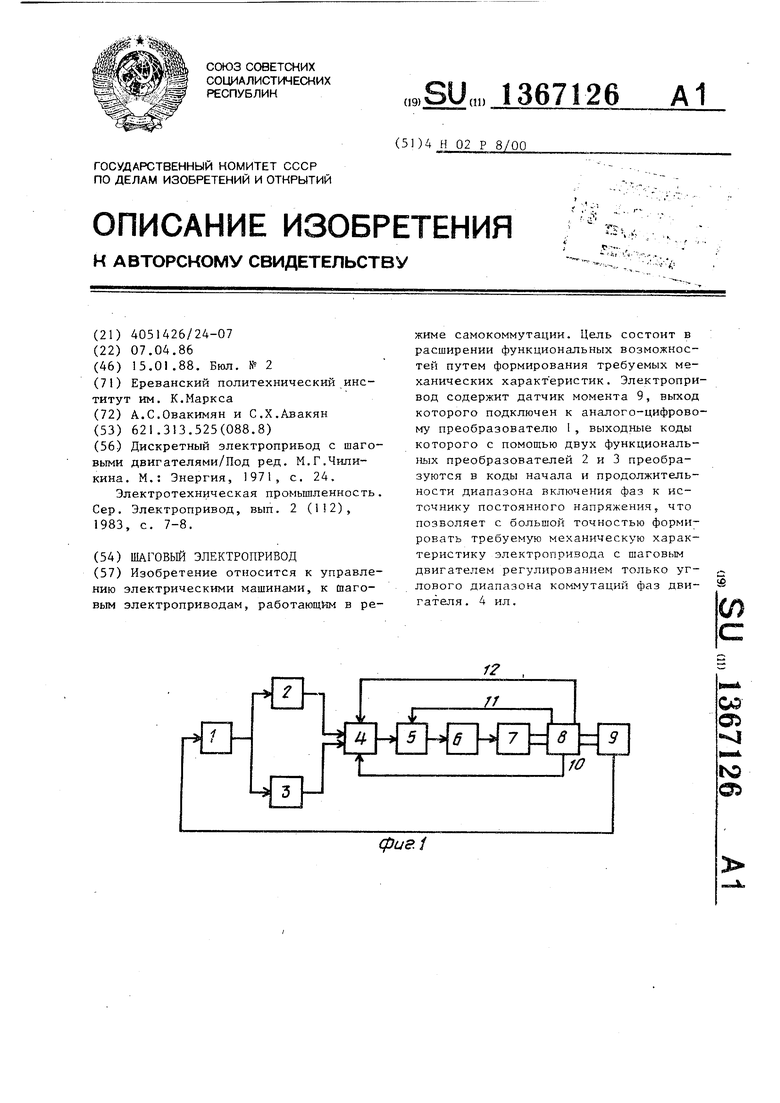
ю
(35
фиг.1
Изобретение относится к управлению электрическими машинами и может быть использовано в шаговом электроприводе; работающем в режиме самокоммутации.
Цель изобретения состоит в расширении функциональных возможностей путем формирования требуемых механических характеристик.
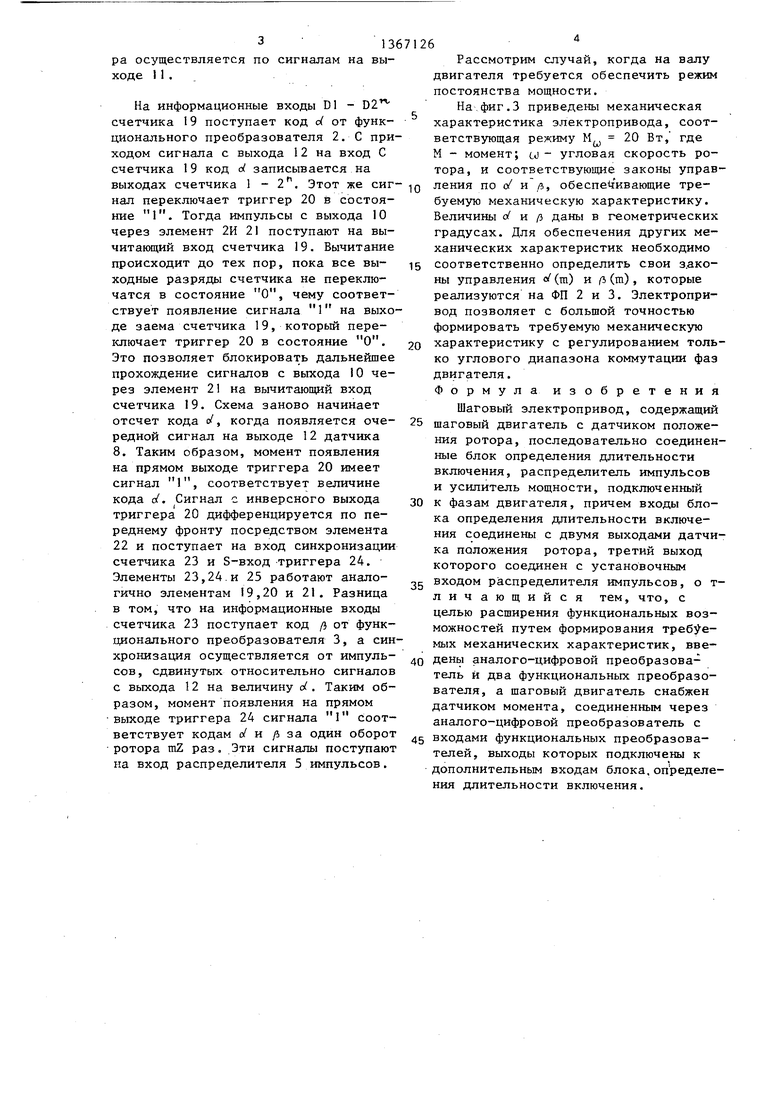
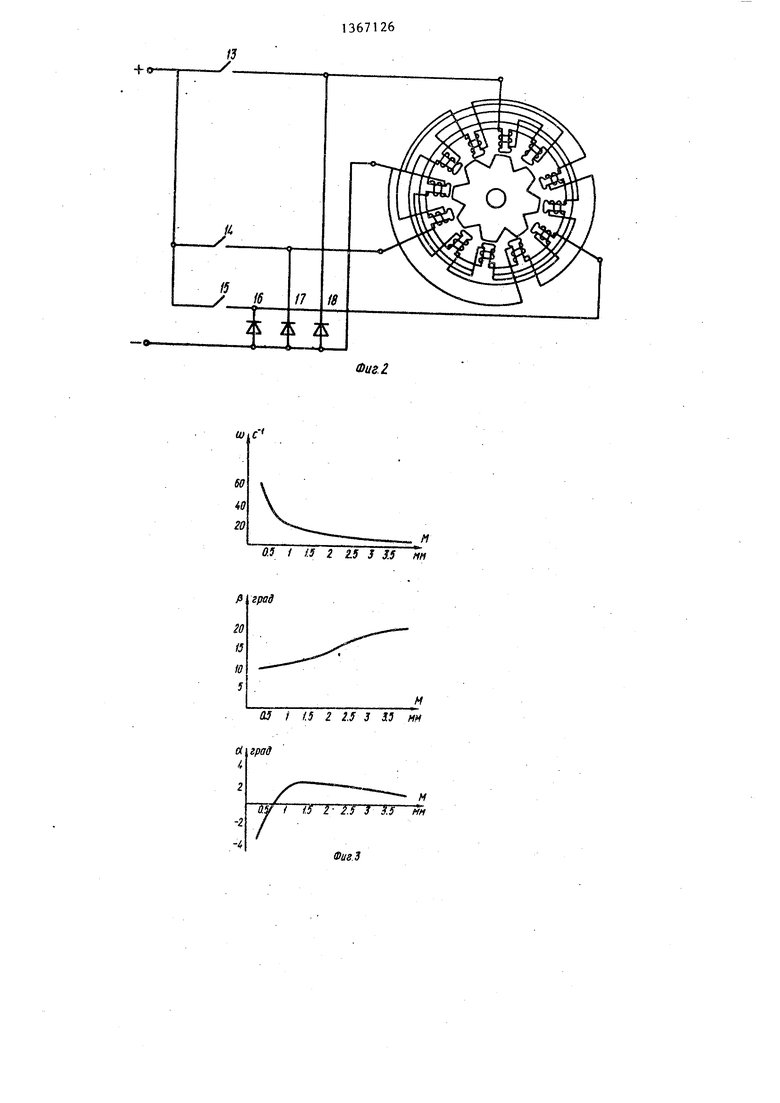
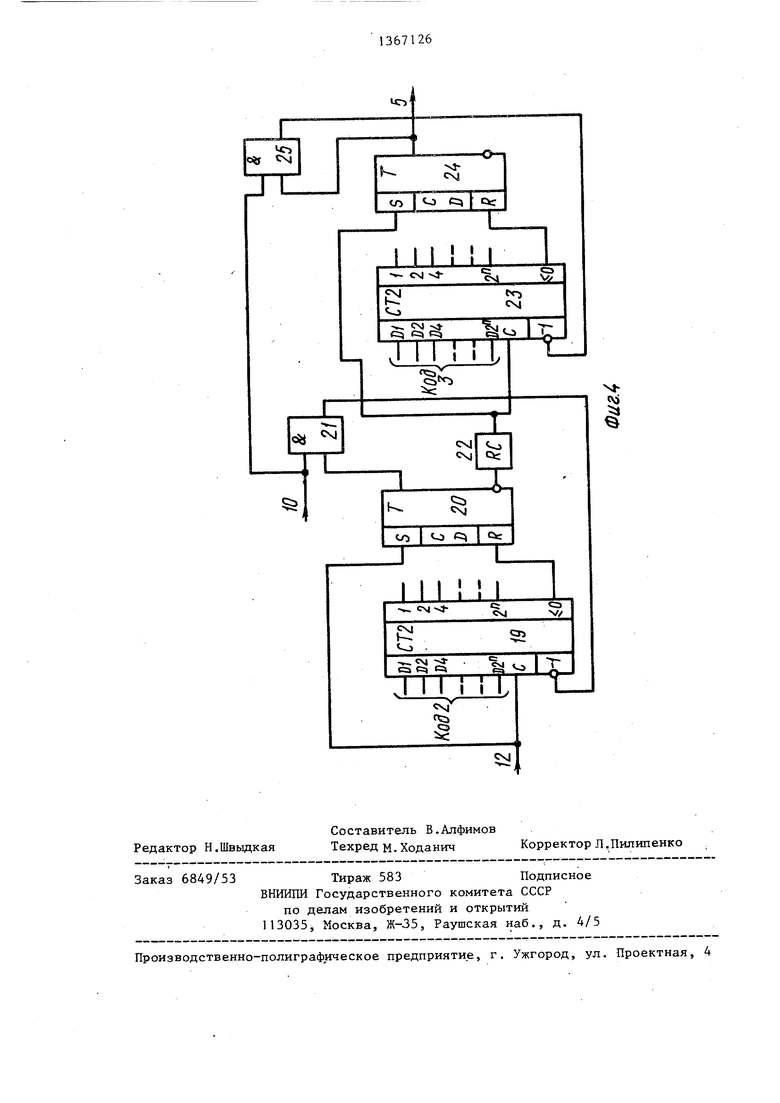
На фиг.1 приведена блок-схема . электропривода; на фиг.2 - схема коммутации фаз двигателя; на фиг.З - зависимости частоты, угла коммутации и ее длительности от требуемого момента; на фиг.4 - функциональная схема блока определения длительности включения.
Аналого-цифровой преобразователь (АЦП) 1 выходом соединен с входами функциональных преобразователей (ФП) 2 и 3, выходы которых подключены к первому и второму входам блока 4 определения длительности включения, выход которого соединен с входом распределителя 5 импульсов, соединенного через усилитель 6 мощности с шаговым двигателем 7, на валу которого установлен датчик 8 положения ротора и датчик 9 момента. Выход 0 датчика 8 соединен с третьим входом блока 4 определения длительности включения, выход 1 датчика 8 - с вторым входом распределителя 5 импульсов, выход 2 датчика 8 - с четвертым входом блока 4, а выход датчика момента 9 соединен с входом АЦП 1. Фазы шагового двигателя 7 подключены к источнику постоянного тока посредством ключей 13,14 и 15 и шунтированы обратными диодами 16,17 и 18. Блок 4 определения длительности включения содержит п-разрядный двоичньй вычитающий счетчик Г9, тактовый вход которого является четвертым входом блока 4 и соединен с S-входом триггера 20, R-вход которого соединен с выходом заема счетчика 19, прямой выход - с первым .входом элемента 2И 21, второй вход которого является третьим входом блока 4, выход подключен к входу вычитания счетчика 19, инверсный выход триггера 20 через дифференциальную цепь 22 соединен с тактовым входом п-разрядного двоичного вьгаитающего счетчика 23 и S-входом триггера 24, R-вход которого соединен с выходом заема счетчика 23, прямрй выход триггера 24 является выходом блока 4 и
соединен с первым входом элемента 2И 25, второй вход которого соединен с вторым входом элемента 2И 21, а выход - с вычитающим входом счетчика 23, информационный вход которого является вторым входом блока 4, а информационный вход счетчика 19 является первым входом блока 4.
Q Функциональные преобразователи 2 и 3 могут быть вьшолнены в виде программируемых постоянных запоминающих устройств.
Датчик 8 углового положения ротог, ра на первом выходе 10 вырабатывает N импульсов за оборот, на втором выходе 11 - один импульс за оборот, на третьем выходе 12 - mZ импульсов за оборот ротора, при этом
0N imZ,
где i - целое число; m - число фаз; Z - число зубцов на роторе. 5 Ключи 13,14 и 15 могут быть транзисторными.
Устройство работает следующим образом.
0 АЦП 1 преобразует величину момента на валу двигателя в двоичный К- разрядный код. Функциональные нелинейные преобразователи 2 и 3 преобразуют полученный код в п-разрядные
ц коды углового диапазона коммутации фаз, двигателя с/ и /}. Оптимальные значения с/ и /} могут быть определены, как указано в известном устройстве. Отсчет cV для каждой фазы осуществля0 ется с углового положения ротора, когда собственная индуктивность данной фазы минимальна. Датчик положения ротора устанавливается таким образом, чтобы на выходе 12 появлялись
5 сигналы, когда собственная индуктивность каждой фазы минимальна. Это соответствует случаю, когда ось зубца полюса фазы совпадает с осью паза ротора и имеет место mZ раз за один
Q оборот ротора. С приходом импульсов происходит запись кодов о и /5 в счетчики 19 и 23. При совпадении количества импульсов с выхода 10 с кодами чисел с/ и /5 на выходе блока 4 выс рабатываются сигналы об отработке углов of и /5. Данные сигналы поступают на вход распределителя 5 импульсов. Синхронизация работы распределителя импульсов от углового положения рото31367126
pa осуществляется по сигналам на выходе II,
На информационные входы D1 - 02 счетчика 19 поступает код с от функционального преобразователя 2. С приходом сигнала с выхода 12 на вход С счетчика 19 код с( записывается на выходах счетчика 1 - 2. Этот же сигнал переключает триггер 20 в состояние 1, Тогда импульсы с выхода 10 через элемент 2И 21 поступают на вычитающий вход счетчика 19. Вычитание происходит до тех пор, пока все выходные разряды счетчика не переключатся в состояние О, чему соответствует появление сигнала 1 на выходе заема счетчика 19, который переключает триггер 20 в состояние О. Это позволяет блокировать дальнейшее прохождение сигналов с выхода 10 через элемент 21 на вычитающий вход счетчика 19. Схема заново начинает отсчет кода о/, когда появляется очередной сигнал на выходе 12 датчика 8. Таким образом, момент появления на прямом выходе триггера 20 имеет сигнал 1, соответствует величине кода с/. Сигнал с инверсного выхода триггера 20 дифференцируется по переднему фронту посредством элемента 22 и поступает на вход синхронизации счетчика 23 и S-вход триггера 24. Элементы 23,24.и 25 работают аналогично элементам 19,20 и 21. Разница в том, что на информационные входы счетчика 23 поступает код /} от функционального преобразователя 3, а синхронизация осуществляется от импульсов, сдвинутых относительно сигналов с выхода 12 на величину о. Таким образом, момент появления на прямом выходе триггера 24 сигнала 1 соответствует кодам о1 к ft за один оборот ротора mZ раз. Эти сигналы поступают на вход распределителя 5 импульсов.
Рассмотрим случай, когда на валу двигателя требуется обеспечить режим постоянства мощности.
На фиг.3 приведены механическая характеристика электропривода, соответствующая режиму М, 20 Вт, где М - момент; и - угловая скорость ротора, и соответствующие законы управления по с/ и ft, обеспе 1ивающие требуемую механическую характеристику. Величины / и /3 даны в геометрических градусах. Для обеспечения других механических характеристик необходимо соответственно определить свои з.ако- ны управления « (т) и ft (m), которые реализуются на ФП 2 и 3. Электропривод позволяет с больщой точностью формировать требуемую механическую характеристику с регулированием только углового диапазона коммутации фаз двигателя.
Формула изобретения Шаговый электропривод, содержащий шаговый двигатель с датчиком положения ротора, последовательно соединенные блок определения длительности включения, распределитель импульсов и усилитель мощности, подключенный к фазам двигателя, причем входы блока определения длительности включения соединены с двумя выходами датчика положения ротора, третий выход которого соединен с установочным
входом распределителя импульсов, о т- личающийся тем, что, с целью расширения функциональных возможностей путем формирования мых механических характеристик, введены аналого-цифровой преобразователь и два функциональных преобразователя, а шаговый двигатель снабжен датчиком момента, соединенным через аналого-цифровой преобразователь с
входами функциональных преобразователей, выходы которых подключены к дополнительным входам блока,определения длительности включения.
60 (7i 20
O.S, I I.S 2 2.5 S 3.5 an
20 iS
Ю 5
03 f /.S 2 2.5 3 3.3 MM
Фиг.З
MM
| Дискретный электропривод с шаговыми двигателями/Под ред | |||
| М.Г.Чили- кина | |||
| М.: Энергия, 1971, с | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Электротехническая промышленность | |||
| Сер | |||
| Электропривод, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
