Изобретение относится к транспортному машиностроению и может быть использовано на предприятиях различных отраслей промышленности для межцеховых и внутрицеховых перевозок грузов в контейнерах.
Известна транспортная система, содержащая трассу, установленный на ней с возможностью перемещения транспортный робот с платформой и механизмом фиксации контейнера с грузом и устройство перегрузки с вилочным захватом.
Недостатками известной транспортной системы являются недостаточно надежная фиксация контейнера на платформе робота, не исключающая возможность случайной расфиксации контейнера в процессе перемещения робота, поскольку элемент управления механизмом фиксации размещен на наружной боковой поверхности робота. Кроме того, боковое размещение этого элемента создает определенное неудобство при снятии контейнера с платформы робота.
Цель изобретения повышение надежности работы транспортной системы за счет повышения надежности фиксации контейнера на роботе, а также в повышении удобства перегрузки его.
Цель достигается тем, что в транспортной системе, содержащей трассу, установленный на ней с возможностью перемещения транспортный робот с платформой и механизм фиксации контейнера с грузом и устройство перегрузки с вилочным захватом, механизм фиксации контейнера выполнен в виде, по меньшей мере, одного эксцентричного валика, ось которого закреплена на конце поворотного рычага, скобы и перемычки, закрепленных на платформе с возможностью взаимодействия с ответными элементами на контейнере, и ползуна с выполненными на его нижней части проушинами, в которых размещена горизонтальная ось, и установленного на платформе с возможностью перемещения в горизонтальной плоскости перпендикулярно продольной оси робота, при этом на платформе выполнен перпендикулярный продольной оси робота паз, а в горизонтальной оси ползуна сквозное поперечное отверстие, причем эксцентричный валик размещен в пазу на платформе с возможностью взаимодействия с нижней плоскостью контейнера, а другой конец рычага расположен в поперечном отверстии горизонтальной оси ползуна, при этом каждая из лап вилочного захвата снабжена подвижным и неподвижным упорами, двумя опорными стойками, планкой с двумя скошенными выступами для взаимодействия с ответными скосами сквозных горизонтальных пазов, выполненных в опорных стойках, и электромагнитом с подпружиненным сердечником, связанным с концом планки и установленным совместно с ней горизонтально в полости, выполненной в лапе вилочного захвата, кроме того, в последней выполнены вертикальные пазы под опорные стойки, а подвижный упор выполнен в виде подпружиненного сердечника электромагнита, закрепленного совместно с неподвижным упором на нижней плоскости лапы вилочного захвата с возможностью их поочередного взаимодействия с ползуном.
Предлагаемая транспортная система обеспечивает надежную фиксацию контейнеров на платформах роботов, при этом повышается удобство перегрузки контейнеров с линии на рабочее место (и наоборот) как в автоматическом режиме, так и в случае ручной перегрузки.
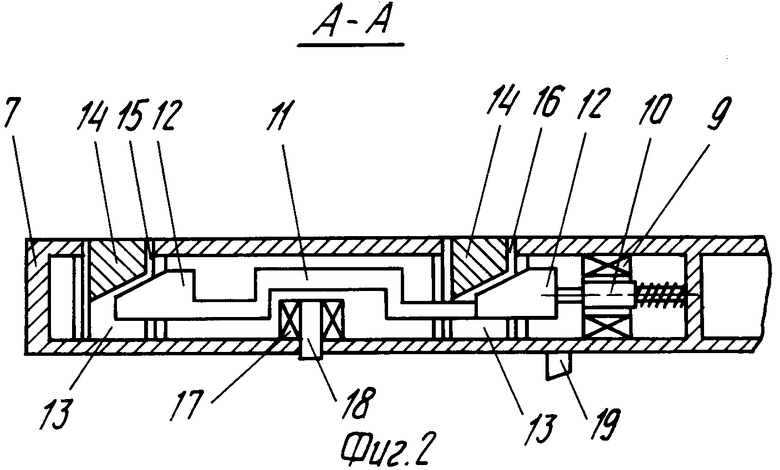
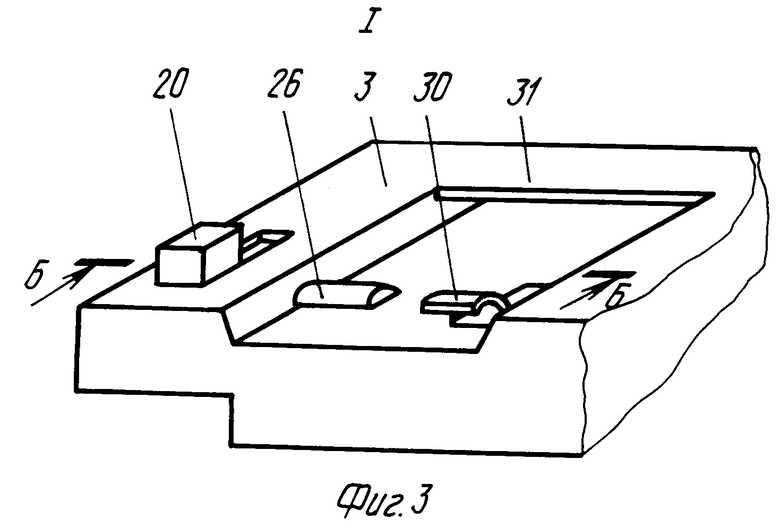
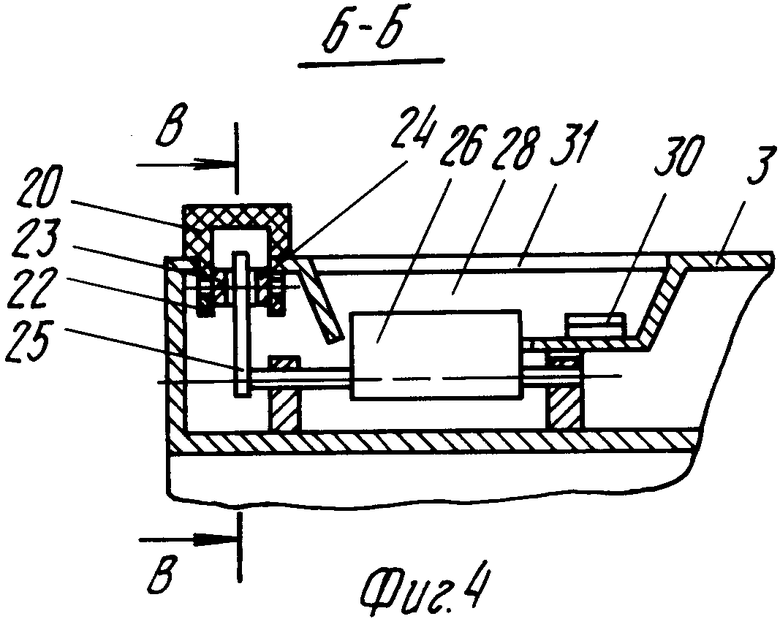
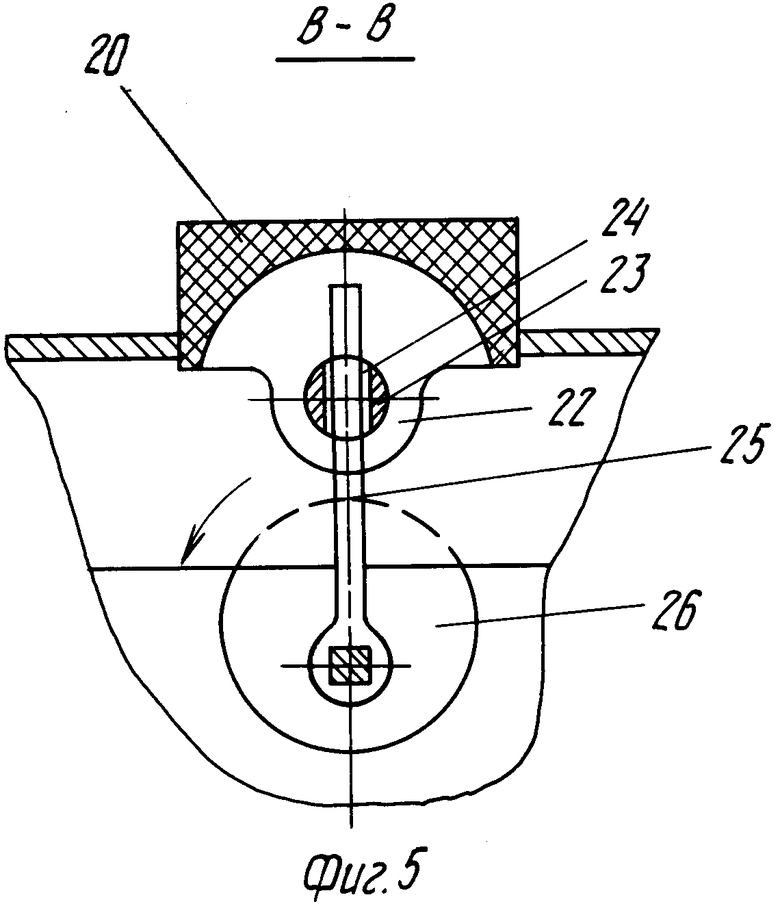
На фиг.1 изображен фрагмент транспортной системы; на фиг.2 разрез А-А на фиг.1; на фиг.3 узел I на фиг.1; на фиг.4 разрез Б-Б на фиг.1; на фиг.5 разрез В-В на фиг.4.
В качестве примера рассмотрим вариант выполнения робота с двумя механизмами фиксации контейнера на платформе.
Транспортная система содержит монорельсовый путь 1, транспортный робот 2, на платформе 3 которого установлен контейнер 4 с грузом. В зоне расположения рабочего места 5 установлено устройство перегрузки 6, в полости каждой лапы 7 вилочного захвата 8 размещен электромагнит 9, подпружиненный сердечник 10 которого связан с горизонтально расположенной планкой 11, имеющей два скошенных выступа 12 с возможностью взаимодействия со скосами пазов 13 стоек 14, размещенных в вертикальных пазах 15 и 16 лап 7. В полости каждой лапы 7 установлен также электромагнит 17, подпружиненный вертикальный сердечник 18 которого является подвижным упором. На лапах 7 снизу установлены неподвижные упоры 19. Упоры 18 и 19 обеих лап 7 имеют возможность поочередного взаимодействия с ползунами 20 и 21, расположенными с двух сторон платформы 3. В проушинах 22 ползунов 20 и 21 установлены горизонтальные оси 23 с поперечно выполненными отверстиями 24, в которых свободно размещены концы рычагов 25, другие концы которых жестко связаны с осями эксцентричных валиков 26 и 27, расположенных в поперечных пазах 28 и 29 платформы 3 параллельно продольной оси робота 2. С одной стороны рядом с валиками 26 и 27 в пазах 28 и 29 имеются скобы 30, а с другой стороны имеются перемычки 31.
Работа транспортной системы в режиме разгрузки контейнеров 4 роботов 2 осуществляется следующим образом.
Транспортный робот 2 с контейнером 4 подается в зону расположения рабочего места 5 в соответствии с заданной программой. На расположенное в этой зоне устройство перегрузки 6 подается команда на выдвижение вилочного захвата 8. При выдвижении его неподвижные упоры 19 лап 7 входят во взаимодействие с ползунами 20 и 21, которые переместятся в направлении продольной оси робота 2. При этом происходит поворот рычагов 25 и связанных с ними валиков 26 и 27, в результате чего происходит освобождение контейнера 4 и его расфиксация.
По окончании выдвижения лап 7 отключаются электромагниты 9, подпружиненные сердечники 10 подают планки 11 вперед, скошенные выступы 12 входят во взаимодействие со скосами пазов 13 стоек 14, которые выдвигаются вверх, захватывают контейнер 4, приподнимая его на несколько миллиметров. Подается команда на обратный ход вилочного захвата 8, в результате чего контейнер 4 снимается с платформы 3 и подается устройством перегрузки 6 на рабочее место 5.
Pежим загрузки контейнера 4 на платформу 3 осуществляется следующим образом.
Вилочный захват 8 с контейнером 4 выдвигается в направлении находящегося на монорельсовом пути 1 робота 2. При этом ползуны 20 и 21 находятся в положении расфиксации, т.е. сдвинуты в сторону продольной оси робота 2. Соответствующие элементы на дне и боковой поверхности контейнера 3 входят в скобы 30 и под перемычки 31 поперечных пазов 28 и 29 платформы 3. По команде срабатывают электромагниты 9, выступы 12 планок 11 выходят из пазов 13 стоек 14, которые при этом сместятся вниз, опустив контейнер на платформу 3. В этот момент отключаются электромагниты 17, подпружиненные сердечники 18 которых выдвигаются снизу лап 7 и при обратном ходе вилочного захвата 8 входят во взаимодействие с ползунами 20 и 21, смещая их в сторону устройства перегрузки 6, в результате чего происходит поворот эксцентричных валиков 26, 27 и фиксация контейнера 4 на платформе 3 путем прижатия соответствующих элементов контейнера 4 к скобам 30 и перемычкам 31. В момент фиксации контейнера 4 в соответствии с программой включаются электромагниты 17, при этом упоры 18 втягиваются в полости лап 7, выходят из взаимодействия с ползунами 20 и 21, а вилочный захват 8 беспрепятственно возвращается в исходное положение.
Предлагаемое техническое решение обеспечивает надежную, безопасную работу транспортной системы. При этом повышается удобство эксплуатации ее и исключается участие оператора при перегрузке контейнеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Приемно-передающее устройство | 1989 |
|
SU1634442A1 |
| УСТРОЙСТВО ДЛЯ СПАСЕНИЯ ЛЮДЕЙ | 2013 |
|
RU2513859C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Конвейер для распределения грузов | 1984 |
|
SU1273317A1 |
| Устройство для перегрузки затаренных грузов | 1986 |
|
SU1359222A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Автоматическая линия штамповки лезвий стрельчатых лап | 1984 |
|
SU1255263A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2014 |
|
RU2582746C1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ ПРЕДМЕТОВ | 1998 |
|
RU2173477C2 |
| Установка для транспортировки и перегрузки сыпучих материалов | 1982 |
|
SU1242437A1 |
Использование: машиностроение, в частности монорельсовые транспортные средства для межцеховых, внутрицеховых перевозок грузов в контейнерах. Сущность изобретения: транспортно-накопительная линия содержит транспортный робот 2 с платформой 3 и механизмом фиксации контейнера на ней и устройство перегрузки 6 с вилочным захватом 8. Механизм фиксации выполнен в виде, по меньшей мере, одного эксцентричного валика, размещенного в поперечных пазах платформы. Ось валика связана с рычагом, другой конец которого размещен в отверстии горизонтальной оси, которая размещена в проушинах ползуна, имеющего возможность перемещения в горизонтальной плоскости. На лапах вилочного захвата установлены подвижный и неподвижный упоры. Подвижный упор выполнен в виде подпружиненного сердечника электромагнита. На лапах опорных стоек выполнены горизонтальные сквозные пазы со скосами, которые могут взаимодействовать с выступами планок, один конец планок каждой из которых связан с подпружиненным сердечником электромагнита. 5 ил.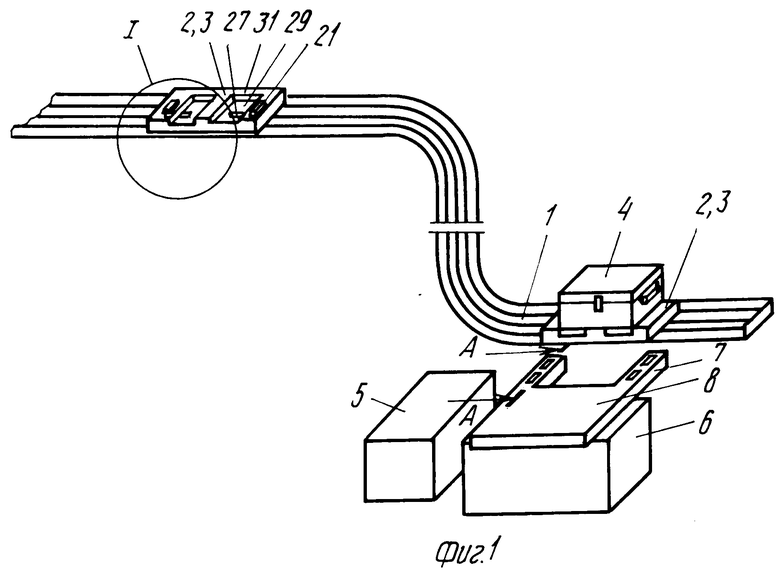
ТРАНСПОРТНАЯ СИСТЕМА, содержащая трассу, установленный на ней с возможностью перемещения транспортный робот с платформой и механизмом фиксации контейнера с грузом и устройство перегрузки с вилочным захватом, отличающаяся тем, что механизм фиксации контейнера выполнен в виде по меньшей мере одного эксцентричного валика, ось которого закреплена на конце поворотного рычага, скобы и перемычки, закрепленных на платформе с возможностью взаимодействия с ответными элементами на контейнере, и ползуна с выполненными на его нижней части проушинами, в которых размещена горизонтальная ось, установленного на платформе с возможностью перемещения в горизонтальной плоскости перпендикулярно продольной оси робота, при этом на платформе перпендикулярно продольной оси робота выполнен паз, а в горизонтальной оси ползуна сквозное поперечное отверстие, причем эксцентричный валик размещен в пазу на платформе с возможностью взаимодействия с нижней плоскостью контейнера, а другой конец рычага расположен в поперечном отверстии горизонтальной оси ползуна, при этом каждая из лап вилочного захвата снабжена подвижным и неподвижным упорами, двумя опорными стойками, планкой с двумя скошенными выступами для взаимодействия с ответными скосами сквозных горизонтальных пазов, выполненных в опорных стойках, и электромагнитом с подпружиненным сердечником, связанным с концом планки и установленным совместно с ней горизонтально в полости, выполненной в лапе вилочного захвата, кроме того, в последней выполнены вертикальные пазы под опорные стойки, а подвижный упор выполнен в виде подпружиненного сердечника электромагнита, закрепленного совместно с неподвижным упором на нижней плоскости лапы вилочного захвата с возможностью их поочередного взаимодействия с ползуном.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| МНПО "Темп", ч.Чебоксары, начало серийного производства 1992. | |||
