Изобретение относится к машиностроению и может быть использовано в качестве автоматического бесступенчатого привода в различных грузоподъемных механизмах и машинах, в частности, в приводах шпилей, брашпилей, лебедок и других.
Известны автоматические инерционные трансформаторы вращающего момента (ИТВМ), обеспечивающие автоматическое бесступенчатое трансформирование вращающего момента двигателя при соосном расположении ведущего и ведомого валов. Недостатком такого трансформатора является то, что не обеспечивается передача момента на валы, расположенные под углом 90о [1]
Известны автоматические инерционные трансформаторы вращающего момента, обеспечивающие автоматическое бесступенчатое изменение вращающего момента под углом 90о при пересекающихся осях промежуточного и ведомого валов.
Недостатком таких трансформаторов является то, что в конструкции механизма необходима коническая передача, что усложняет конструкцию, увеличивает ее габариты и вес [2]
Наиболее близким к изобретению является автоматический инерционный планетарный вариатор, содержащий ведущий и ведомый валы, сателлит с неуравновешенными грузами, центральное зубчатое колесо соединенное с промежуточным валом посредством червячной пары, упругого элемента и конической и цилиндрической зубчатых пар [3]
Недостатком известного вариатора являются сложность конструкции, невозможность передачи вращающего момента под углом 90о и реверсирование вращения ведомого вала без дополнительных устройств.
Задачей изобретения является расширение функциональных возможностей передачи и упрощение ее конструкции.
Для этого в автоматическом инерционном трансформаторе вращающего момента, содержащем размещенную в корпусе планетарную передачу в виде ведущего звена, соединенного с ведущим валом, сателлитов с неуравновешенными грузами, центрального зубчатого колеса, соединенного с промежуточным валом, последний соединен с находящимися в одновременном зацеплении с одним червячным колесом двумя червяками, причем с одним из них через реверсивную зубчатую передачу и упругий элемент.
Кроме того, он снабжен дополнительной реверсирующей зубчатой передачей и дополнительным упругим элементом, направление закручивания которого противоположно основному упругому элементу.
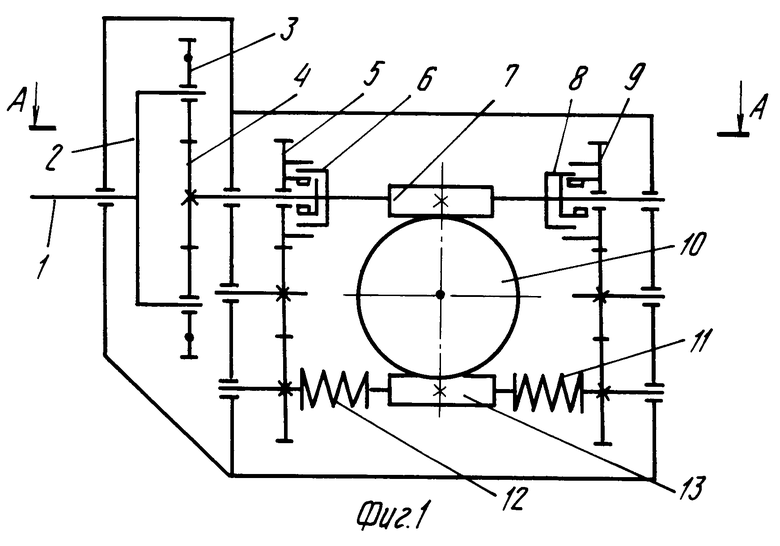
На фиг.1 изображена кинематическая схема трансформатора момента; на фиг. 2 разрез А-А на фиг.1; на фиг.3 схема сил; на фиг.4 графики характеристик μu и ωi.
Автоматический инерционный трансформатор вращающего момента (ИТВМ) состоит из ведущего вала 1, связанного с приводным двигателем (на чертеже не показан), водила 2, неуравновешенных сателлитов 3, солнечного колеса 4, зубчатой передачи 5 прямого хода, устройства включения прямого хода 6 (например, зубчатая муфта), червяка 7 передачи прямого импульса, устройства 8 включения обратного хода, зубчатой передачи 9 обратного хода, червячного колеса 10, пружин кручения противоположно направленного действия червяка 1 обратного импульса, ведомого вала 14 и корпуса 15.
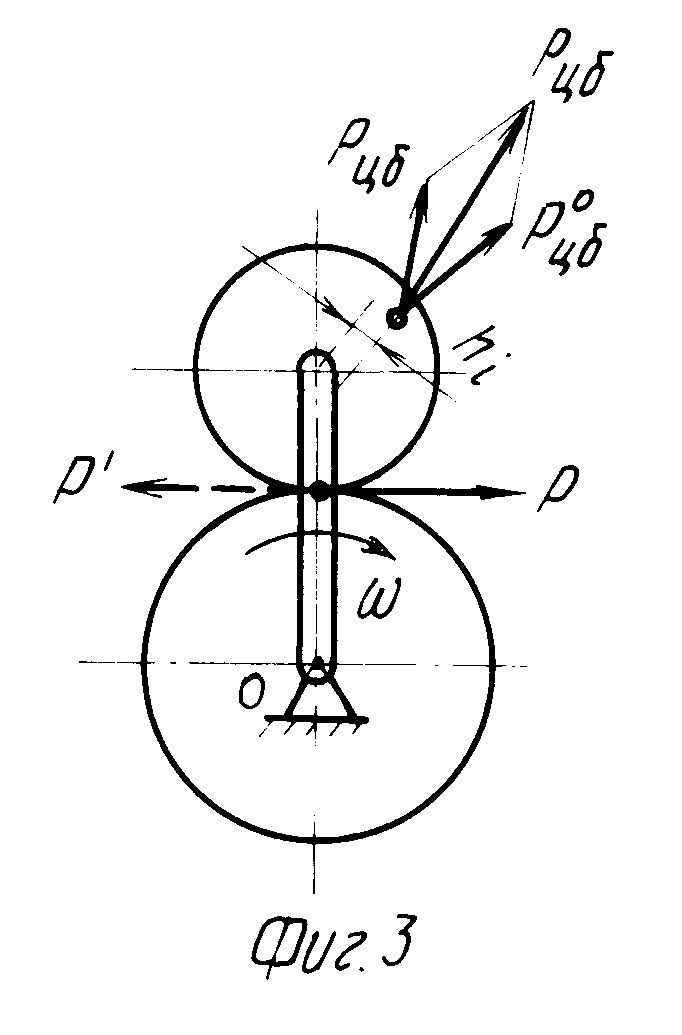
ИТВМ работает следующим образом. При вращении ведущего вала 1 водило 2 заставляет вращаться неуравновешенные сателлиты 3. Сателлиты 3 обкатываются по солнечному колесу 4 и вследствие наличия неуравновешенной массы создают на нем знакопеременный момент Мu Pцhi (фиг.3). Когда центр масс груза находится на вертикальной линии, плечо действия центробежных сил инерции равно нулю, следовательно, равен нулю и момент сил инерции. Когда центр масс находится на горизонтальной линии в правой полуплоскости, плечо имеет максимальное значение, максимальным будет и инерционный момент на солнечном колесе, создаваемый силой Р (фиг.3) по часовой стрелке, в левой полуплоскости инерционный момент, направленный против часовой стрелки (сила Р', фиг.3). Положительный импульс момента, направленный в сторону вращения вала приводного двигателя, воспринимается червяком 7 и передается червячному колесу 10. Одновременно положительный импульс момента зубчатой передачей 5 через устройство 6 включения и пружину 12 передается червяку 13, последний также вращает червячное колесо 10 и ведомый вал 14. Таким образом, импульс инерционного момента передается ведомому валу 14 двумя потоками через червяки 7 и 13, что снижает нагрузки в зацеплениях, червяки-червячное колесо и позволяет рационально выполнить конструкцию червячных механизмов.
С началом действия отрицательного импульса момента солнечное колесо 4, зубчатая передача 5, червяк 7 силами инерции неуравновешенных сателлитов тормозятся до полной остановки, чему способствуют также силы сопротивления на ведомом валу (фиг.4б). Далее червяк 7 пытается вращать червячное колесо 10 в обратную сторону. Однако, оно остается неподвижным, поскольку пружина 12 не передает вращение в обратную сторону червяку 13, который в силу своих свойств удерживает червячное колесо 10 неподвижным.
С началом действия положительного импульса момента цикл повторяется. Ведомый вал 14 движется циклически (фиг.4б), постепенно поднимая или подтягивая груз. Червячное колесо 10 и червяк 13 удерживает груз от смещения в период действия отрицательного импульса инерционного момента.
Для вращения ведомого вала 14 в обратную сторону (например, опускания груза) устройство 6 включения выключается, а устройство 8 включается. Рабочий процесс протекает аналогичным образом, только вращение осуществляется от действия отрицательного импульса момента посредством зубчатой передачи 9, пружины 11 и червяков 7 и 13.
За счет выбора параметров импульсного механизма ИТВМ обеспечивает заданную силу тяги и одновременно предохраняет привод от перегрузок. В случае превышения силы сопротивления на валу 14 расчетной величины солнечное колесо 4 перестает вращаться. Сателлиты 3 будут обкатываться по неподвижному солнечному колесу 4, продолжая создавать на нем максимальные импульсы инерционного момента. При этом нагрузки в системе останутся на уровне расчетных величин.
Таким образом, привод обеспечивает бесступенчатое автоматическое изменение вращающего момента и угловой скорости ведомого вала при постоянной скорости вращения ведущего вала в зависимости от сопротивления на ведомом валу. Одновременно обеспечивается защита двигателя от перегрузок при любом внешнем сопротивлении на ведомом валу. Обеспечивается также автоматическое стопорение ведомого вала в случаях внезапной остановки приводного двигателя. Запуск приводного двигателя происходит в режиме холостого хода, вследствие отсутствия жесткой кинематической связи между ведущими и ведомыми элементами ИТВМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный гидродифференциальный трансформатор вращающего момента | 1982 |
|
SU1097848A1 |
| ИНЕРЦИОННЫЙ ГИДРОДИФФЕРЕНЦИАЛЬНЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА | 1995 |
|
RU2106554C1 |
| АВТОМАТИЧЕСКИЙ ИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА | 1993 |
|
RU2064621C1 |
| Динамическая автоматическая муфта сцепления | 1991 |
|
SU1831608A3 |
| Инерционный гидродифференциальный трансформатор вращающего момента | 1980 |
|
SU1028924A1 |
| Муфта предельного момента | 1986 |
|
SU1460465A1 |
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1726877A1 |
| Инерционный трансформатор | 1991 |
|
SU1825927A1 |
| Инерционный трансформатор крутящего момента | 1975 |
|
SU729406A1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |


Использование: машиностроение. Сущность изобретения: трансформатор вращающего момента содержит планетарную передачу имеющую сателлиты с неуравновешенными грузами, промежуточный вал, два червяка, одно червячное колесо, две реверсирующие зубчатые передачи, два упругих элемента со взаимно противоположным направлением закручивания. Промежуточный вал соединен с находящимися в одновременном зацеплении с червячным колесом двумя червяками. С одним из червяков промежуточный вал соединен через реверсирующую зубчатую передачу и упругий элемент. 1 з. п. ф-лы, 4 ил.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| АВТОМАТИЧЕСКИЙ ИНЕРЦИОННЫЙ ПЛАНЕТАРНЫЙ ВАРИАТОР СКОРОСТИ | 0 |
|
SU364787A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
