Предлагаемое устройство относится к области автоматического регулирования и может быть использовано в системах автоматического управления объектами с распределенными параметрами или имеющими по крайней мере два регулируемых параметра и одно управляющее воздействие.
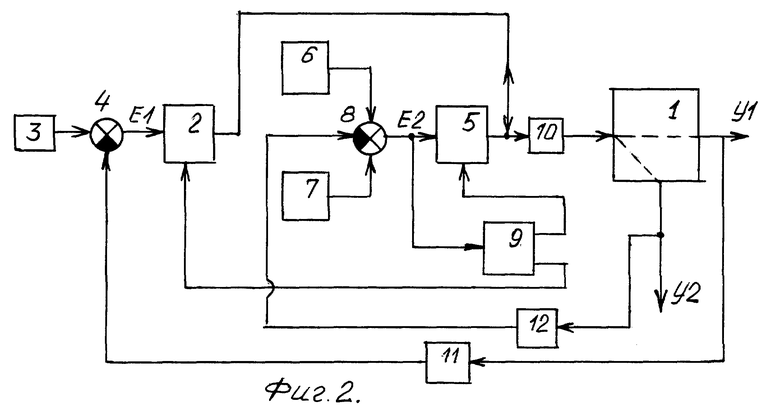
Традиционная схема каскадного регулирования имеет структуру, приведенную на фиг. 1. Технологический объект управления (ТОУ) имеет два регулируемых параметра: основной Y1, поскольку он является целью регулирования, и вспомогательный Y2, который используется для улучшения качества регулирования основного параметра.
Регулирование основного параметра-Y1 осуществляется внешним контуром, включающим в себя входной сигнал задания Y1зд, внешний (ведущий, корректирующий) регулятор R1 и функциональные блоки Oмакс и Oмин, ограничивающий выходной сигнал внешнего регулятора сверху вниз.
Регулирования вспомогательного параметра Y2 осуществляется внутренним контуром, включающий внутренний (ведомый, стабилизирующий) регулятор R2. Для него сигналом задания Y2зд является регулирующее воздействие внешнего регулятора, являющегося ведущим по отношению к внутреннему (ведомому) регулятора. Последний - R2 формирует управляющее воздействие на объект через исполнительное устройство (ИУ) на входе, общем как для основного - Y1, так и для вспомогательного параметра - Y2.
Сигналы об основном и вспомогательном параметрах внешнего и внутреннего контуров формируются соответственно датчиками Д1 и Д2 и подаются для сравнения с сигналами заданий Y1зд и Y2зд на элементы сравнения ЭС1 и ЭС2 соответственно.
Условием реализуемости (эффективности) подобных каскадных систем является меньшая инерционность объекта по каналу вспомогательного параметра Y2 относительно основного Y1.
Известен способ каскадного регулирования температуры в реакторе с коррекцией задания регулятору температуры на выходе теплообменника (см. Автоматическое управление в химической промышленности: Учебник для вузов. Под ред. Е.Г.Дудникова. -М.: Химия, 1987, с. 42 - 43, рис. 1.22).
В этом способе внутренним контуром является система автоматического регулирования температуры на выходе теплообменника, а внешним - температура в реакторе. Регулирующее воздействие - расход пара подается на вход теплообменника. Канал регулирования, включающий два аппарата (теплообменник и реактор) и трубопроводы, является сложной системой с большой инерционностью. На объект действуют ряд возмущений, поступающих в разные точки системы, - давление и энтальпия пара, температура и расход реакционной смеси, потери тепла в реакторе и т. п. При возмущении по давлению пара регулятор внутреннего контура изменяет степень открытия регулирующего клапана таким образом, чтобы поддержать заданную температуру на выходе теплообменника. При возмущении по расходу реакционной смеси имеется температура в реакторе и, как следствие, задание регулятору температуры теплообменника, что вновь изменит степень открытия регулирующего клапана в сторону восстановления температуры в реакторе и теплообменнике.
В зависимости от требований к точности регулирования основного параметра во внешнем контуре применяют астатические (И, ПИ) регуляторы, а во внутреннем - быстродействующие статические, как правило, П- или ПД-регуляторы.
Недостатком подобных каскадных систем регулирования является применение регуляторов аналогового типа и связанного с этим усложнения схемных решений - включения специальных функциональных блоков, ограничивающих сверху и снизу корректирующий сигнал внешнего (ведущего) регулятора. В силу этого рассмотренные каскадные системы управления при изменении параметров объекта регулирования или нагрузки характеризуется сравнительно невысоким быстродействием и большим перерегулированием в динамике, т.е. недостаточным качеством регулирования.
Другим недостатком таких каскадных систем является сложность расчета настроечных параметров регуляторов, вызванная необходимостью использования итерационных процедур для каждого контура в отдельности (при настройке одного из регуляторов другой содержит еще неопределенные оптимальные параметры).
Целью изобретения является повышение быстродействия и уменьшение перерегулирования при изменении параметров объектов или нагрузки, а также упрощение процедуры расчета настроек параметров регуляторов.
Поставленная задача достигается тем, что устанавливают сигналы задания верхнего Y2'' и нижнего Y2' допустимых значений вспомогательного параметра для регулятора внутреннего контура и определяют на заданном интервале ошибку рассогласования E1 для астатического регулятора внешнего контура, воздействующего посредством исполнительного устройства на объект на этом интервале с помощью аналогового сигнала, определяемого законом регулированием этого внешнего регулятора. При выходе вспомогательного параметра из зоны задания Y2' < Y2 < Y2'' с выхода регулятора внутреннего контура на исполнительное устройство подают управляющее воздействие релейного типа, со знаком, уменьшающим отклонение вспомогательного параметра от заданных крайних значений интервала, а основного параметра - от заданного значения. Одновременно отключают от объекта управляющее воздействие внешнего астатического регулятора, формируя и сохраняя при этом его интегральную составляющую равную значению сигнала средней позиции трехпозиционного адаптивного регулятора, используемого в качестве регулятора внутреннего контура (см. авт. св. N 675399. Пневматический регулятор. Магергут В.З., Гимпельсон В.Г., Стальнов П.И. Бюл. 27 от 28.07.79).
При возврате вспомогательного параметра в заданную зону одновременно отключают управляющее воздействие внутреннего регулятора и включают управляющее воздействие внешнего регулятора. Таким образом, при каждом выходе вспомогательного параметра из заданной зоны, управляющее воздействие на объект формируется лишь во внутреннем контуре, а при возврате его в заданную зону управляющее воздействие на объект формирует регулятор внешнего контура, обеспечивая стабилизацию основного параметра с заданной точностью.
Иначе, в каждый момент времени объектом управляет лишь один из регуляторов: внутренний, если вспомогательный параметр Y2 вышел из зоны нечувствительности внутреннего регулятора, или внешний, когда Y2 находится в зоне.
Управление работой регуляторов ведется по вспомогательному параметру Y2 (точнее по сигналу рассогласования E2 между Y2 и сигналами задания Y2' и Y2''), который в этом плане становится ведущим параметром объекта, т.е. параметром, который определяет логику работы управляющего устройства регуляторов, формирующего соответствующие управляющие воздействия на регуляторы, по сигналу рассогласования E2.
Обеспечивая единовременную работу либо внешнего либо внутреннего регулятора, т.е. автономность работы внешнего и внутреннего контуров системы каскадного регулирования, благодаря их логическому переключению посредством управляющего устройства, отпадает необходимость в проведении сложной итерационной процедуры расчета настроек регуляторов, и появляется возможность использовать известные методы расчета одноконтурных систем аналогового и позиционного действия (см., например, Магергут В.З., Вент Д.П., Кацер И.А. Инженерные методы выбора и расчета оптимальных настроек промышленных регуляторов. Новомосковск, НФ РХТУ, 1994. 158 с.).
Применение во внутреннем контуре адаптивного трехпозиционного способа регулирования с подстраиваемой к нагрузке объекта средней позицией (см. авт. св. N 458812. Способ автоматического трехпозиционного регулирования. Магергут В.З., Гимпельсон В.Г., Стальнов П.И., Беляев Ю.В. Бюл. 4 от 30.01.75) позволяет, с одной стороны, формировать мощное релейное управляющее воздействие, приводящее к увеличению быстродействия системы регулирования и уменьшению перерегулирования основного параметра, а, с другой стороны, обеспечить в это же время нахождение управляющего воздействия примерно соответствующего значению нагрузки и осуществлять благодаря слежению за этим значением интегральной составляющей внешнего контура, безударное переключение управляющего воздействия внешнего регулятора на это значение при его подключении к объекту.
Регулятор внутреннего контура дает задание регулятору внешнего контура, причем не по заданию, а по выходному сигналу его интегральной составляющей, обеспечивая тем самым безударность включения внешнего регулятора в момент вхождения вспомогательного параметра объекта Y2 в зону нечувствительности внутреннего регулятора и точную настройку управляющего воздействия на значение нагрузки объекта.
Иначе, в предлагаемом способе уже внутренний регулятор становится как бы ведущим по отношению к внешнему регулятору, ставшему ведомым. Таким образом, предложен способ каскадного автоматического регулирования путем измерения вспомогательного параметра объекта и стабилизации его с помощью одноконтурной системы регулирования, измерения основного параметра объекта и стабилизации его с помощью астатической одноконтурной системы регулирования и формирования сигнала задания регулятору внутреннего контура, отличающийся тем, что устанавливают сигналы задания верхнего и нижнего допустимых значений вспомогательного параметра объекта для регулятора внутреннего контура и определяют на заданном интервале ошибку рассогласования для астатического регулятора внешнего контура, воздействующего посредством исполнительного устройства на объект в заданном интервале с помощью аналогового сигнала, определяемого законом регулирования астатического регулятора внешнего контура, при выходе вспомогательного параметра объекта из заданного интервала с выхода регулятора внутреннего контура на исполнительное устройство подают управляющее воздействие релейного типа со знаком, уменьшающим отклонение вспомогательного параметра объекта от верхнего и нижнего допустимых значений, а основного параметра объекта - от заданного значения и одновременно отключают управляющее воздействие астатического регулятора внешнего контура, формируют и сохраняют интегральную составляющую этого регулятора на уровне значения средней позиции выходного сигнала регулятора внутреннего контура; при возврате вспомогательного параметра объекта в заданный интервал одновременно отключают управляющее воздействие регулятора внутреннего контура и включают управляющее воздействие астатического регулятора внешнего контура.
Предлагаемый способ иллюстрируется функциональной схемой, приведенной на фиг. 2.
Схема содержит технологический объект управления 1, регулятор внешнего контура регулирования 2 и задатчик 3, блок сравнения 4, регулятор внутреннего контура 5, задатчики верхнего и нижнего уровня 6 и 7 соответственно, блок сравнения 8, устройство управления 9, исполнительное устройство 11, 12 основного и вспомогательного параметров соответственно.
Способ каскадного автоматического регулирования осуществляется следующим образом. Непрерывно измеряют с помощью датчика 11 параметр Y1 и стабилизируют его с помощью автоматического регулятора 2 по астатическому закону с воздействием на исполнительное устройство 10. Датчиком 12 непрерывно измеряют вспомогательный параметр Y2 и с помощью задатчиков 6 и 7 формируют величину задания верхнего и нижнего уровня этого параметра. С помощью трехпозиционного адаптивного регулятора 5 автоматически поддерживают значение этого параметра в заданном интервале, воздействуя на исполнительное устройство 10.
Устройство управления 9 непрерывно измеряют ошибку рассогласования E2 внутреннего контура регулирования и в зависимости от величины и знака этой ошибки включает регулирующее воздействие, поступающее либо с внутреннего, либо с внешнего регулятора.
При выходе вспомогательного параметра из зоны задания с выхода регулятора внутреннего контура 5 на исполнительное устройство подают управляющее воздействие релейного типа, со знаком, уменьшающим отклонение вспомогательного параметра от заданных крайних значений интервала, а основного параметра - от заданного значения. Одновременно устройство управления 9 отключает управляющее воздействие внешнего астатического регулятора 2, формируя и сохраняя его интегральную составляющую на уровне значения средней позиции выходного сигнала трехпозиционного адаптивного регулятора 5.
Поскольку в предлагаемом способе каскадного автоматического регулирования регуляторы внешнего и внутреннего контуров работают равномерно, то на период отключения регулятора 2 внешнего контура от исполнительного устройства 10 канал связи между выходами регулятора 5 и 2 используют для подачи сигнала средней позиции адаптивного регулятора 5 в регулятор 2 для формирования в нем интегральной составляющей, равной сигналу средней позиции регулятора 5. Таким образом, по каналу, помеченному разнонаправленными стрелками, сигнал проходит то с выхода регулятора 2 к исполнительному устройству 10, то от регулятора 5 (со звена формирования средней позиции) к регулятору 2 (в интегральную составляющую регулятора).
Рассмотрим применение данного способа для различных известных систем каскадного регулирования.
Так для способа-аналога - каскадное регулирование температуры в реакторе - он сводится к следующему: основным параметром объекта регулирования является температура Тр в реакторе, а вспомогательным температура Тт на выходе теплообменника. Для последней устанавливают два значения ее задания - больше номинального Тт'' и меньше Тт'. Для реактора устанавливают заданное значение температуры Трзд и поддерживают ее обычным ПИ-регулятором по одноконтурной системе регулирования. При отклонении температуры реактор Тр от задания одновременно отклоняется от номинала и температура Тт на выходе из теплообменника, причем, выбег последней за пределы зоны, т.е. за значения Тт'' или Тт' происходит быстрее, чем произойдет отклонение Тр от Трзд на величину требуемой точности регулирования (из-за меньшей инерционности объекта по каналу: температура на выходе теплообменника Тт-управляющее воздействие Gn по пару и соответствующего выбора значений Тт'' и Тт'. Происходит срабатывание адаптивного позиционного регулятора и формирование им релейного управляющего воздействия на объект по Gn (верхнего Gn'' или нижнего Gn', направленного на возврат Тт в зону, к Трзд. Одновременно позиционным воздействием на объект происходит формирование нового значения средней позиции этого регулятора Gnср, соответствующего новому значению нагрузки объекта или эквивалентному ей изменению его параметров. Это новое значение отслеживается в интегральной части ПИ-регулятора, который при управлении объектом посредством внутреннего адаптивного позиционного регулятора отключен от управления объектом.
При вхождении Тт в зону за счет мощного и быстрого позиционного управляющего воздействия (затем, что оно будет мощнее и быстрее воздействия даже ПД-регулятора, используемого в способе прототипа) происходит переключение на новое значение Gnср как в регуляторе внутреннего контура, так и в подключаемом к управлению объектом вместо него ПИ-регуляторе, т.е. управление объектом начинается с нового значения управляющего воздействия, равновесного (или близкого) к новому значению нагрузки. Последнее, наряду с быстрым возвратом Тт в зону, а Тр к Трзд, также обеспечивает повышение качества регулирования по предлагаемому способу.
Рассмотрим второй пример применения способа для автоматического регулирования работы дефлегматора в процессе перегонки по авт. св. N 971395. Магергут В.З., Бебелис В.Я., Масленников И.М., Бюл. 41 от 07.11.82.
Объектом является дефлегматор, в котором необходимо поддерживать температуру Тд на его выходе (основной параметр). Для повышения точности предложен традиционный способ каскадного регулирования, в котором в качестве вспомогательного параметра используется Рд внизу дефлегматора, т.е. на его входе. Управляющим воздействием является расход хладоагента Gx в дефлегматор.
Для увеличения эффективности работы этой системы также можно использовать предлагаемый нами способ.
Для внутреннего контура на базе адаптивного позиционного регулирования потребуется задать два значения давления на входе в дефлегматор: Рд'' и Рд' - соответственно больше и меньше номинального. Работать способ будет аналогично рассмотренному для объекта первого примера. Улучшение качества регулирования будет достигнуто как за счет большого быстродействия и более мощного воздействия внутреннего контура, так и нахождения одновременно с этим воздействием нового равновесного значения управляющего воздействия, соответствующего новому значению адаптивной средней позиции внутреннего регулятора.
За счет автономности работы каждого из контуров регулирования (внешнего и внутреннего) настройка регуляторов как в первом, так и во втором примерах, естественно будет проще, чем для прототипа.
Аналогичным образом быть видоизменены и все другие применяющиеся в промышленности системы автоматического каскадного регулирования, имеющие два регулируемых параметра (основного и вспомогательного) при одном управляющем воздействии при дополнительном условии, чтобы управляющее воздействие не являлось одновременно и вспомогательным параметром.
В настоящее время авторы занимаются внедрением предлагаемого способа на ряде предприятий Тульской и Рязанской областей: АО "ОРГСИНТЕЗ" и НАК "АЗОТ", АООТ "Ключанский спиртзавод", причем, как путем замены существующих способов автоматического каскадного регулирования, так и самостоятельного внедрения предлагаемого способа для ряда объектов, со всеми вытекающими экономическими эффектами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ РЕКТИФИКАЦИИ ТРЕХКОЛОННОЙ БРАГОРЕКТИФИКАЦИОННОЙ УСТАНОВКИ | 1999 |
|
RU2174030C2 |
| НЕЧЕТКИЙ АДАПТИВНЫЙ ПОЗИЦИОННЫЙ СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ С ДИСКРЕТНЫМИ ИСПОЛНИТЕЛЬНЫМИ УСТРОЙСТВАМИ | 2013 |
|
RU2514127C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2129726C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ ТЕМПЕРАТУРНОГО ПРОФИЛЯ В РЕАКТОРЕ | 2006 |
|
RU2326424C2 |
| СПОСОБ КАСКАДНОГО ЦИФРОВОГО РЕГУЛИРОВАНИЯ | 2015 |
|
RU2600024C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОДАВЛЕНИЯ ВИБРАЦИИ ПОМОЛЬНО-СМЕСИТЕЛЬНОГО АГРЕГАТА | 2014 |
|
RU2567158C1 |
| СПОСОБ РЕАЛИЗАЦИИ ДВУХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2007 |
|
RU2362198C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2158435C2 |
| СПОСОБ АДАПТИВНОГО ТРЕХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2474856C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2155361C2 |
Изобретение относится к области автоматического регулирования. Технический результат заключается в повышении быстродействия и уменьшении перерегулирования при изменении параметров объекта или нагрузки, а также в упрощении процедуры расчета настроек параметров регуляторов. Технический результат достигается за счет того, что во внутреннем контуре используют адаптивный трехпозиционный регулятор со средней позицией, зависящей от нагрузки объекта. Кроме того, по результату работы регулятора внутреннего контура с помощью устройства управления к объекту подключают управляющее воздействие либо внутреннего, либо внешнего регулятора. При выходе вспомогательного параметра из зоны задания работает внутренний контур регулирования, а по возвращении его в зону включается внешний и отключается внутренний контур. При этом интегральная составляющая выходного сигнала внешнего регулятора формируется внутренним регулятором и равна значению сигнала средней позиции трехпозиционного регулятора на момент отключения внутреннего контура. Безударный переход к работе внешнего регулятора, формирование мощного релейного управляющего воздействия во внутреннем контуре обеспечивают более высокое качество регулирования основного параметра. Независимая во времени работа внешнего и внутреннего контуров позволяет использовать известные инженерные методы расчета настройки регуляторов в одноконтурных системах. 2 ил.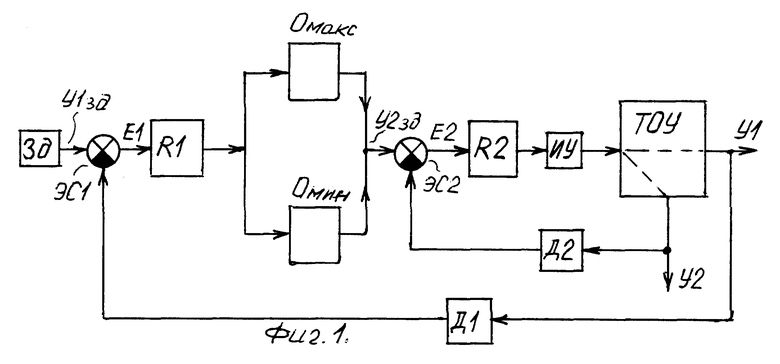
Способ каскадного автоматического регулирования путем измерения вспомогательного параметра объекта и стабилизации его с помощью одноконтурной системы регулирования, измерения основного параметра объекта, стабилизации его с помощью астатической одноконтурной системы регулирования и формирования сигнала задания регулятору внутреннего контура, отличающийся тем, что устанавливают сигналы задания верхнего и нижнего допустимых значений вспомогательного параметра объекта для регулятора внутреннего контура и определяют на заданном интервале ошибку рассогласования для астатического регулятора внешнего контура, воздействующего посредством исполнительного устройства на объект в заданном интервале с помощью аналогового сигнала, определяемого законом регулирования астатического регулятора внешнего контура, при выходе вспомогательного параметра объекта из заданного интервала с выхода регулятора внутреннего контура на исполнительное устройство подают управляющее воздействие релейного типа со знаком, уменьшающим отклонение вспомогательного параметра объекта от верхнего и нижнего допустимых значений, а основного параметра объекта - от заданного значения и одновременно отключают управляющее воздействие астатического
регулятора внешнего контура, формируют и сохраняют интегральную составляющую этого регулятора на уровне значения средней позиции выходного сигнала регулятора внутреннего контура, при возврате вспомогательного параметра объекта в заданный интервал одновременно отключают управляющее воздействие регулятора внутреннего контура и включают управляющее воздействие астатического регулятора внешнего контура.
| Автоматическое управление в химической промышленности /Под.ред | |||
| Е.Г.Дудникова | |||
| - М.: Химия, 1987, с.42 и 43, рис.1-22 | |||
| SU 675399 A, 25.06.79 SU 458812 A, 30.01.75 | |||
| Способ автоматического регулирования работы дефлегматора в процессе перегонки | 1981 |
|
SU971395A1 |
| Магергут В.З | |||
| и др | |||
| Инженерные методы выбора и расчета оптимальных настроек промышленных регуляторов | |||
| - Новомосковск: НФ РХТУ, 1994. | |||

