Изобретение относится к техническим средствам автоматизации, а именно к пневматическим позиционным регуляторам.
Цель изобретения упрощение конструкции регулятора.
На фиг. 1 представлена схема регулятора; на фиг.2 схема узла сравнения; на фиг.3 схема задатчика.
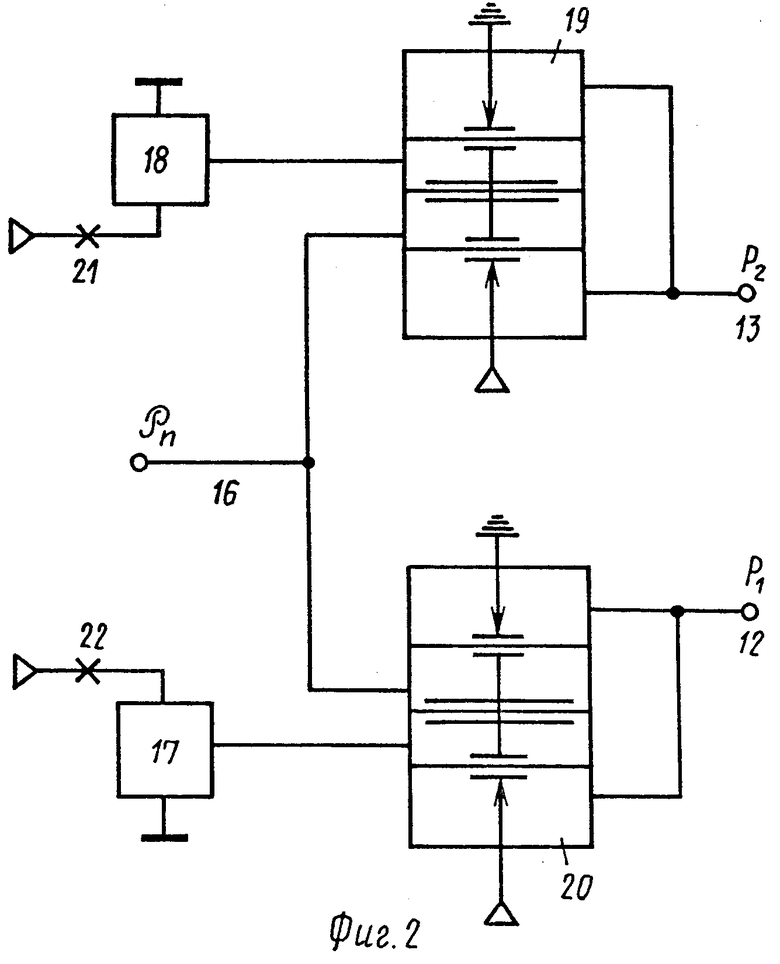
Регулятор содержит (фиг.1) выходной усилитель 1, дроссель 2, клапаны 3 и 4, элемент ИЛИ 5, задатчики сигналов нижней 6 и верхней 7 крайних позиций, шаговый реверсивный пневмопривод 8 и задатчик 9 средней позиции, кинематически соединенный с приводом 8. Пневмопривод 8 и задатчик 9 образуют реверсивный шаговый задатчик. Клапан 3 является нормально закрытым, клапан 4 нормально открытым. Входы элемента ИЛИ 5 и первый 10 и второй 11 управляющие входы пневмопривода 8 подключены к первому 12 и второму 13 входным каналам.
Выход усилителя 1 подключен к выходному каналу 14 регулятора (Рвых), его вход через дроссель 2 соединен с каналом питания 15, с задатчиком 7, через нормально закрытый клапан 3 с задатчиком 6, а через нормально открытый клапан 4 с задатчиком 9. Все задатчики 6, 7 и 9 работают на сброс давления и соединены с каналом питания 15 через дроссель 2 по схеме выбора минимального сигнала. Это означает, что если ко входу усилителя 1 будут подключены два задатчика, то на этом входе давление будет равно минимальному из давлений, на которые настроены эти задатчики.
Управляющая камера клапана 3 сообщена с входным каналом 12, а управляющая камера клапана 4 с выходом элемента 5.
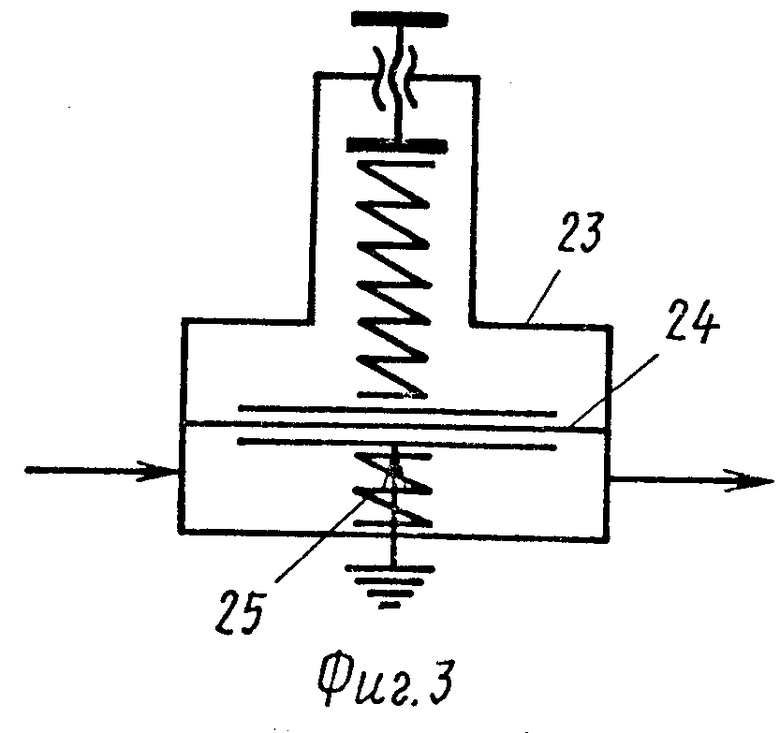
Узел сравнения (фиг.2) предназначен для формирования входных сигналов Р1 и Р2 регулятора. Узел содержит канал 16 регулируемой величины Рn, задатчик 17 нижней границы зоны нечувствительности, задатчик 18 верхней границы зоны нечувствительности, элементы 19, 20 сравнения, постоянные дроссели 21, 22. Задатчики 6, 7, 9, 11, 12 (фиг.3) выполнены в виде корпуса 23, в котором установлена подпружиненная мембрана 24 и сопло 25, сообщенное с атмосферой.
Регулятор работает следующим образом.
В узле сравнения (фиг. 2) сигнал параметра Рn (регулируемой величины) сравнивается с сигналами нижней и верхней границ зоны нечувствительности. Дискретные сигналы Р1 и Р2 принимают единичное значение при нахождении регулируемой величины вне зоны нечувствительности, причем Р1 1, если регулируемая величина не достигла зоны, и Р2 1, если эта величина превысила зону (или наоборот). При вхождении регулируемой величины в зону оба сигнала равны нулю. Выход из зоны приводит к подаче импульса на дискретный пневмопривод, который совершает поворот на один шаг в ту или другую сторону в зависимости от пришедшего сигнала Р1 или Р2. При этом первичное включение регулятора приводит лишь к повороту на один шаг привода 8, т.е. можно говорит о фиксированной перенастройке сигнала средней позиции.
Одновременно при сигнале Р2 1 на выходе регулятора устанавливается сигнал верхней позиции, определяемый задатчиком 7, так как задатчики 6 и 9 отключены при этом от входа усилителя 1 клапанами 3 и 4, а при сигнале Р1 1 сигнал нижней позиции, определяемый задатчиком 6, подключаемым к усилителю 1 через клапан 3.
Поворот на шаг привода 8 при подаче сигналов Р1 1 или Р2 1 делается так, чтобы при сигнале Р2 сигнал задатчика 9 приближался к сигналу задатчика 7, а при Р1 к сигналу задатчика 6.
При отключении привода 8 от задатчика 9 или перекрытии каналов управления этим приводом регулятор начинает работать как регулятор с фиксированными позициями.
Имея приводы с различными значениями поворота на один шаг, можно перенастраивать среднюю позицию оптимальным образом для любой системы регулирования.
В качестве сигналов Р1 и Р2 могут быть использованы дискретные сигналы различных измерительных приборов, например мостов или потенциометров, преобразованные в дискретные пневмосигналы посредством электропневмопреобразователей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1985 |
|
SU1289244A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2153696C2 |
| Пневматический следящий привод | 1981 |
|
SU968786A1 |
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1990 |
|
SU1802606A1 |
| Пневматический регулятор | 1980 |
|
SU868702A1 |
| Пневматический регулятор переменной структуры | 1975 |
|
SU542170A1 |
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2047210C1 |
| ПНЕВМАТИЧЕСКИЙ ДИСКРЕТНЫЙ РЕГУЛЯТО ОПТИМАЛЬНОГО РЕЖИМА | 1971 |
|
SU432457A1 |
| УСТРОЙСТВО СМЕШЕНИЯ И ДОЗИРОВАНИЯ ЖИДКИХ КОМПОНЕНТОВ В ЗАДАННОМ СООТНОШЕНИИ | 2021 |
|
RU2767588C1 |
| АДАПТИВНЫЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 2010 |
|
RU2408913C1 |
Изобретение относится к техническим средствам автоматизации, а именно к пневматическим позиционным регуляторам. Цель изобретения упрощение конструкции регулятора. Пневматический позиционный регулятор содержит усилитель 1, вход которого соединен через дроссель 2 с каналом питания 15, а выход с выходным каналом 14. Вход усилителя 1 также соединен с выходами нормально закрытого клапана 3 и нормально открытого клапана 4, причем управляющая камера клапана 3 подключена к первому входному каналу 12. Входы элемента ИЛИ 5 сообщены с первым 12 и вторым 13 входными каналами, а выход с управляющей камерой второго клапана 4. Задатчик 7 верхней позиции соединен с входом усилителя 1, а задатчик 6 нижней позиции подключен к входу первого клапана. В регуляторе установлен шаговый реверсивный пневмопривод 8 с первым 10 и вторым 11 управляющими входами, подключенными соответственно к первому 12 и второму 13 входным каналам, а выход пневмопривода кинематически связан с задатчиком 9 средней позиции, который подключен к входу второго клапана 4. 3 ил.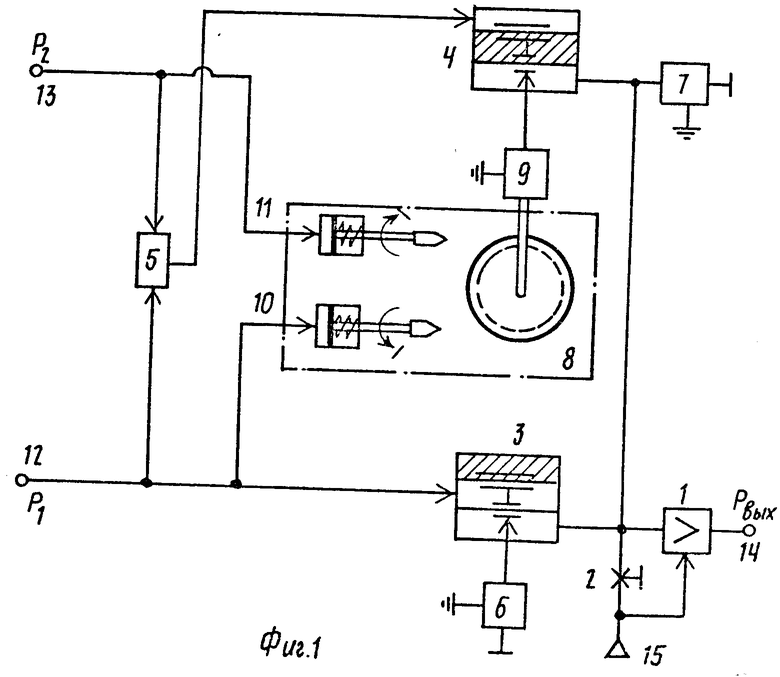
ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР, содержащий усилитель, вход которого соединен через дроссель с каналом питания, а выход с выходным каналом, первый нормально закрытый и второй клапаны, соединенные выходами со входом усилителя, причем управляющая камера первого клапана подключена к первому входному каналу, элемент ИЛИ, входы которого сообщены с первым и вторым входными каналами, а выход с управляющей камерой второго клапана, а также задатчики верхней, средней и нижней позиций, при этом задатчик верхней позиции соединен со входом усилителя, а задатчик нижней позиции подключен ко входу первого клапана, отличающийся тем, что, с целью упрощения конструкции, в нем установлен шаговый реверсивный пневмопривод с первым и вторым управляющими входами, подключенными соответственно к первому и второму входным каналам, а выход пневмопривода кинематически связан с задатчиком средней позиции, который подключен ко входу второго клапана, выполненному нормально открытым.
| Авторское свидетельство СССР N 675399, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
