Изобретение относится к области автоматического управления, а именно к двухпозиционному регулированию. Оно может быть использовано для автоматического управления процессами как в промышленности (регулирование температуры в нагревательных печах, прессах, экструдерах, регулирование уровня в кубах ректификационных колонн и т.п.), так и в быту (регулирование температуры в бытовых электронагревательных приборах).
Известен способ автоматического двухпозиционного регулирования, основанный на задании максимального U2 max и минимального U1 min значений управляющего воздействия, задании номинального сигнала регулируемой величины N и переключении управляющего воздействия с большего U2 max на меньшее U1 min или наоборот при выбеге регулируемой величины за номинальное значение сигнала N (см. , например, А.А.Кампе-Немм. Автоматическое двухпозиционное регулирование. - М. : Наука, 1967, с. 6). Недостатком такого способа является низкое качество регулирования.
Улучшить качество регулирования можно, если применить способ автоматического многопозиционного регулирования - прототип (см., например, то же, с. 68-70). Положительные эффекты в нем достигаются за счет задания ряда управляющих воздействий, воздействующих на объект при выбеге регулируемой величины за соответствующее значение сигнала задания этой величины. В частности таких значений сигналов регулируемой величины может быть пять: номинальное N, зоны с двумя значениями, одно из которых больше номинального, а второе - меньше на величину δ, еще одной зоны тоже с двумя значениями, но отличающимися от номинального на величину ±Δ, причем  При выбеге регулируемой величины за номинальное значение сигнала задания N происходит переключение управляющего воздействия, например, с большего U2 на меньшее U1 или наоборот; при выбеге за последующие зоны N+δ и N+Δ значения управляющих воздействий, воздействующих на объект, возрастают, например, на величину ΔU, а при выбеге за значения N-δ и N-Δ убывают, т.е. при задании пяти значений сигналов задания регулируемой величины N, N±δ и N±Δ имеем шестипозиционное регулирование. Положительные эффекты в нем достигаются за счет небольшого (на ΔU) изменения управляющих воздействий на объект при соответствующем выбеге за значение той или иной зоны и задания самих зон.
При выбеге регулируемой величины за номинальное значение сигнала задания N происходит переключение управляющего воздействия, например, с большего U2 на меньшее U1 или наоборот; при выбеге за последующие зоны N+δ и N+Δ значения управляющих воздействий, воздействующих на объект, возрастают, например, на величину ΔU, а при выбеге за значения N-δ и N-Δ убывают, т.е. при задании пяти значений сигналов задания регулируемой величины N, N±δ и N±Δ имеем шестипозиционное регулирование. Положительные эффекты в нем достигаются за счет небольшого (на ΔU) изменения управляющих воздействий на объект при соответствующем выбеге за значение той или иной зоны и задания самих зон.
В то же время недостатком способа-прототипа является недостаточное качество регулирования, особенно для объектов с меняющейся нагрузкой, в силу фиксированности значений управляющих воздействий на объект и установления различных средних значений регулируемой величины при этих изменениях в силу колебаний последней возле того или иного из значений зон.
Цель изобретения - улучшение качества автоматического позиционного регулирования объектами с меняющейся нагрузкой.
Цель достигается максимальным приближением управляющих воздействий, действующих на объект регулирования, к нагрузке объекта при заданном номинальном значении сигнала N регулируемой величины.
Для этого для реализации предлагаемого способа, как и в способе-прототипе, задают пять значений сигналов задания регулируемой величины: номинального (N); зоны с двумя значениями, одно из которых больше номинального (N+δ), а второе - меньше номинального (N-δ) на некоторую величину δ и зоны тоже с двумя значениями, но отличающимися от номинального на величину ±Δ, причем  т.е. N+Δ и N-Δ.
т.е. N+Δ и N-Δ.
Номинальное значение сигнала задания (N) используют, как и в способе-прототипе, для переключения управляющих воздействий с большего U2 на меньшее U1 (или наоборот), причем в первоначальный момент формируют максимальное - U2 max (для большего) и минимальное - U1 min (для меньшего) значения управляющих воздействий.
Значение зоны N±δ используют для формирования значения управляющего воздействия, т. е. для его адаптации к нагрузке объекта. Причем, если регулируемая величина превысит значение N+δ и при этом включено, например, большее управляющее воздействие U2, то меньшему значению U1 присваивают значение управляющего воздействия, равное (U1 + U2)/2, т.е. меньшее управляющее воздействие приближают к большему управляющему воздействию и делают равным среднему значению между вновь действующим большим управляющим воздействием и ранее действовавшим меньшим управляющим воздействием.
Новое присвоенное значение меньшего управляющего воздействия запоминают (для чего в регуляторе устанавливают ячейку памяти нижней позиции (ЯПН)) и далее используют как новое меньшее управляющее воздействие на объект, а также для дальнейшей адаптации позиций регулятора, в случае повторного выбега регулируемой величины за первую зону N±δ. Старое же значение меньшего управляющего воздействия, записанное в ЯПН, стирают, причем в первоначальный момент в ЯПН записывают минимальное значение управляющего воздействия U1 min.
Если напротив, при той же характеристике регулятора регулируемая величина стала меньше номинального сигнала задания (N) и при этом включилось меньшее U1 управляющее воздействие, а затем она стала меньше N-δ, то большее значение U2 управляющего воздействия приближают к меньшему и делают равным среднему значению управляющего воздействия между действующим меньшим значением и ранее действовавшим большим значением. При этом новое значение большего управляющего воздействия запоминают (для чего в регуляторе устанавливают ячейку памяти верхней позиции (ЯПВ)), а ранее действующее - стирают. В первоначальный же момент в ЯПВ записывают максимальное значение управляющего воздействия U2 max.
Иначе, при выбеге регулируемой величины за зону N±δ управляющему воздействию, недействующему в данный момент на объект регулирования, присваивают среднее значение между действующим значением управляющего воздействия и ранее действовавшим, а в данный момент недействующим значением управляющего воздействия, с последующим запоминанием нового значения в соответствующую ячейку памяти ЯПН или ЯПВ. Таким образом, управляющее воздействие регулятора, недействующее в данный момент времени на объект регулирования, адаптируют в сторону сближения с действующим управляющим воздействием регулятора.
Если регулируемая величина продолжает изменяться в сторону следующей зоны N±Δ и превысит значение N+Δ или станет меньше N-Δ, то формируют вместо действующего управляющего воздействия его максимальное или минимальное значение соответственно, т.е. устанавливают крайнее значение действующего управляющего воздействия (U2max или U1 min). При этом в соответствующую ячейку памяти (ЯПВ или ЯПН) записывают это значение управляющего воздействия, а ранее записанное - стирают.
Процесс адаптации (перенастройки) управляющих позиций регулятора начинают с момента включения системы регулирования и прекращают в том случае, если размах автоколебаний ΔY не будет превышать значения зоны 2δ, а сама регулируемая величина Y не выходит из зоны N±δ, т.е.
N-δ<Y<N+δ.
В общем случае процесс адаптации управляющих воздействий регулятора можно записать следующим образом: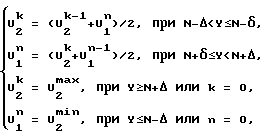
где Y - значение регулируемой величины;
k = 0; 1; 2... - число срабатываний порогового элемента при переходе регулируемой величины нижнего значения зоны N-δ, т.е. при Y≤N-δ;
n= 0; 1; 2... - число срабатываний порогового элемента при переходе регулируемой величины верхнего значения зоны N+δ, т.е. при Y≥N+δ.
На фиг. 1 приведена блок-схема системы регулирования, реализующая данный способ автоматического двухпозиционного регулирования.
Система состоит из адаптивного двухпозиционного регулятора I и объекта регулирования II с меняющейся нагрузкой F.
Регулятор содержит пять элементов сравнения 1 - 5 с пороговыми элементами, формирующих дискретные управляющие сигналы X1 - X5, релейный элемент 6 с изменяющимися значениями верхнего (U2) и нижнего (U1) управляющих воздействий, крайние значения которых могут достигать, соответственно, значений U2 max и U1 min, управляющих элементов 7 и 8, образующих блок управления III, двух ячеек памяти 10 ЯПБ (верхней позиции) и 9 ЯПН (нижней позиции), в которых хранятся соответствующие значения управляющих воздействий, двух элементов 11 и 12, предназначенных для преобразования дискретных потенциальных сигналов X2 и X4 в единичные импульсы X2 и и X4 и соответственно, продолжительностью τ, выходной управляющий канал U и пять входных каналов, для задания сигналов задания регулируемой величины: Yэд= N; N±δ; N±Δ.
Командный сигнал X3 управляет переключением управляющих воздействий с U1 на U2 или наоборот. Сигнал X2 преобразуется элементом 11 в единичный импульс X2 и продолжительностью τ, который через элемент 7 осуществляют перенастройку U2 (большего управляющего воздействия регулятора 3) с учетом записанных в ячейки памяти 9 (ЯПН) и 10 (ЯПВ) значений нижнего и верхнего управляющих воздействий, а также осуществляет сброс ранее записанного значения управляющего воздействия и запись нового значения в ячейку памяти 10 (ЯПВ).
Аналогично сигнал X4, преобразованный элементом 12 в импульс X4 и, через элемент 7 осуществляет перенастройку U1 (меньшего управляющего воздействия) согласно значений в ЯПВ и ЯПН, а также осуществляет сброс ранее записанного и запись нового значения управляющего воздействия в ячейку памяти 9 (ЯПН). Причем время длительности (τ) сигналов X2 и и X4 и должно быть достаточным для перезаписи соответствующих управляющих воздействий в ячейки памяти ЯПН или ЯПБ. Таким образом, при срабатывании элементов 2 или 4 происходит однократное изменение управляющих воздействий в соответствующих ячейках памяти. Для повторного же их изменения необходимо, чтобы регулируемая величина вошла в зону N±δ, а затем вновь превысила значения этой зоны. Сигналы X1 и X5 через элемент 8 возвращают управляющие воздействия U1 и U2, соответственно, к своим крайним значениям U1 min и U2 max, а также производят сброс ранее записанных и запись крайних значений в соответствующих ячейках памяти 9 (ЯПН) и 10 (ЯПВ).
Определение среднего значения между начавшим действовать на объект и предшествующим управляющим воздействиями производится путем суммирования значений этих воздействий и деления результирующего значения пополам.
Для этого предшествующее значение управляющего воздействия U1 n-1 (или U2 k-1) подается в ячейку памяти ЯПН 9 (или ЯПН 10) соответственно. Туда же подается и значение вновь начавшего действовать на объект управляющего воздействия U-U2 (или U1) соответственно (на блок-схеме фиг. 1 линия подачи управляющего воздействия U на элементы 9 и 10 не показана, хотя возможно для лучшего понимания работы схемы это следовало бы сделать).
В момент, определяемый появлением импульса X4 u (X2 u) соответственно на элементе 9 (или 10), в них происходит определение вышеназванного среднего значения U1 n (или U2 k) соответственно, т.е.
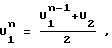
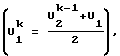
его запоминание и стирание значения U1 n-1 (U2 k-1), что условно показано в виде скачка управляющего воздействия в элементе 6 со значения U1 n-1 на U1 n (или U2 k-1 или U2 k), происходящего по импульсу X4 u (X2 u) соответственно, проходящего через управляющий элемент 7. Фактически этот скачок имеет место по этим импульсам в соответствующих ячейках памяти ЯПН (или ЯПН 10).
Запомненное значение U1 n (U2 k) с элемента 9 (или 10) передается в момент переключения управляющих воздействий с U2 на U1 (или с U1 на U2), т.е. в момент изменения сигнала X3, на элемент 6 через вышеназванный элемент 7 (см. линии, подходящие к нему сверху на фиг. 1), т.е. на объект управления в качестве значения U (линия командного сигнала X3 на элемент 7 фиг. 1 также не показана).
Для реализации передачи запомненного значения управляющего воздействия U1 n (U2 k) в элементах 9 (10) на объект элемент 7 должен представлять из себя управляемый сигналом X3 переключательный элемент.
Приняв командные сигналы X1 - X5 в виде следующих логических зависимостей:
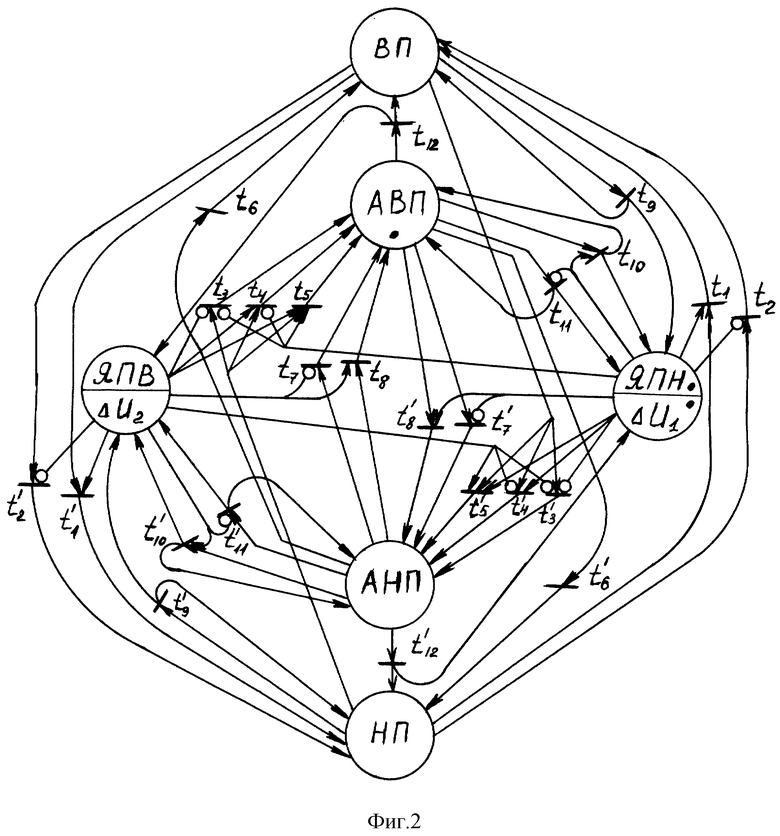
можно представить предлагаемый способ в виде алгоритма, описываемого ингибиторной сетью Петри (см., например, Юдицкий С.А., Магергут В.З. Логическое управление дискретными процессами. - М.: Машиностроение, 1987) и представленного на фиг. 2.
Буквами в кружках на фиг. 2. обозначено выполнение следующих операций:
ВП - включение крайнего максимального управляющего воздействия (верхней позиции регулятора) (U2 max);
НП - включение крайнего минимального управляющего воздействия (нижней позиции регулятора) (U1 min);
АВП - включение большего адаптивного управляющего воздействия (адаптивной верхней позиции) (U2);
АНП - включение меньшего адаптивного управляющего воздействия (адаптивной нижней позиции) (U1);
ЯПВ - запись U2 в ячейку памяти большего управляющего воздействия (верхней позиции);
ЯПН - запись U1 в ячейку памяти меньшего управляющего воздействия (нижней позиции);
ΔU1 и ΔU2 - приращение значений управляющих воздействий, соответственно, меньшего и большего (по вышеизложенным формулам).
На переходах ti (черточках сети) записываются условия их срабатывания в виде булевых функций от командных сигналов X1 - X5. Для соответствующего перехода они такие:
t1 - U1 minU2 maxX3;
t2 - U1 minU2 maxX3;
t9 - U2 maxX4 и; t'9 - U1 minX2 и;



t12 - X5; t'12 - X1.
Начальная маркировка сети дана для случая действия на объект большего адаптивного управляющего воздействия (верхней адаптивной позиции - метка в кружке АПВ) и одновременного изменения и записи нового меньшего значения управляющего воздействия (нижней позиции - метки в кружках ΔU1 и ЯПН).
Поскольку операции приращения меньшего управляющего воздействия и записи его в ЯПН происходят одновременно, то для упрощения сети эти операции объединены в один кружок. Аналогично объединены операции приращения большего управляющего воздействия и запись его в ЯПВ.
Сеть подтверждает однозначность предложенного способа автоматического двухпозиционного регулирования.
В настоящее время разрабатывается ряд устройств регуляторов, работающих по данному способу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2144690C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2155361C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2129726C1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2153696C2 |
| СПОСОБ РЕАЛИЗАЦИИ ТРЕХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2001 |
|
RU2220432C2 |
| СИСТЕМА АДАПТИВНОГО ДВУХПОЗИЦИОННОГО УПРАВЛЕНИЯ | 2010 |
|
RU2430398C1 |
| СПОСОБ КАСКАДНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2127895C1 |
| СПОСОБ РЕАЛИЗАЦИИ ДВУХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2007 |
|
RU2362198C1 |
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2047210C1 |
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1990 |
|
SU1802606A1 |
Изобретение относится к области автоматического управления, а именно к двухпозиционному регулированию. Технический результат заключается в улучшении качества регулирования за счет сокращения времени адаптации. Способ регулирования заключается в том, что при выбеге регулируемой величины за первую зону адаптации управляющему воздействию, переставшему действовать на объект, присваивают среднее значение между вновь действующим значением управляющего воздействия и значением, переставшим действовать. Таким образом, достигается более быстрое сближение позиций регулятора со значением нагрузки объекта, что приводит к сокращению времени адаптации. При изменении нагрузки объекта регулятор сохраняет возможность возврата позиций в их крайние значения (за счет выбега параметра за зону реадаптации), а при последующих выбегах параметра за зону адаптации позволяет произвести подстройку позиций к новому значению нагрузки. 2 ил.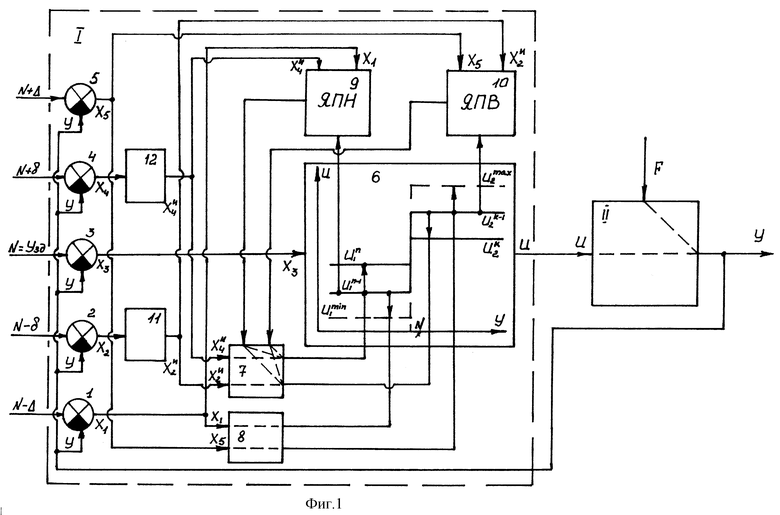
Способ автоматического двухпозиционного регулирования, основанный на задании минимального U1 min и максимального U2 max значений управляющего воздействия, пяти значений сигналов задания регулируемой величины: номинального N, зоны с двумя значениями, одно из которых больше номинального, а второе - меньше на величину δ, зоны тоже с двумя значениями, но отличающимися от номинального на величину ±Δ, причем |Δ| > |δ|, и переключении управляющего воздействия с большего U2 на меньшее U1 или наоборот при выбеге регулируемой величины за номинальное значение сигнала задания, отличающийся тем, что при выбеге регулируемой величины за значения сигналов задания зоны N±δ управляющему воздействию, переставшему действовать на объект, присваивают среднее значение между вновь действующим управляющим воздействием и значением, переставшим действовать, которое после присвоения стирают, а присвоенное среднее значение запоминают и используют в качестве управляющего воздействия в случае повторного выбега регулируемой величины за значения сигналов задания зоны N±δ, а при выбеге регулируемой величины за значения сигналов задания зоны N±Δ значение действующего на объект управляющего воздействия стирают, а вместо него запоминают и воздействуют на объект соответствующим ему минимальным U1 min или максимальным U2 max значением управляющего воздействия.
| КАМПЕ-НЕММ А.А | |||
| Автоматическое двухпозиционное регулирование | |||
| - М.: Наука, 1967, с | |||
| Способ получения смеси хлоргидратов опийных алкалоидов (пантопона) из опийных вытяжек с любым содержанием морфия | 1921 |
|
SU68A1 |
| КЛЮЕВ А.С | |||
| Двухпозиционные регуляторы и их настройка | |||
| - М.: Энергия, 1967 | |||
| В. В. Рыбальченко\ВМБЛеяОлЬйЛ | 0 |
|
SU264021A1 |
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2047210C1 |
