Изобретение относится к техническим средствам автоматизации, а именно к пневматическим позиционным регуляторам. Оно может быть использовано при автоматизации бытовых приборов, нагревательных печей, экструдеров и иных объектов, где используется двухпозиционное регулирование.
Известны двухпозиционные регуляторы, например системы "Старт" типа ПР1.5 (см. каталог "Пневматические приборы системы "Старт", ЦНИИТЭИ приборостроения, средств автоматизации и систем управления, М.: 1973, с. 4 - 6). Их действие основано на реализации релейного закона регулирования.
В той же системе (см. там же, с. 6 - 9) имеется регулятор позиционный с настраиваемой зоной неоднозначности типа ПР1.6. Наряду с настраиваемой зоной в регуляторе можно настраивать и максимальное значение выходного сигнала, т. е. ограничивать значение максимального управляющего сигнала подаваемого с регулятора на исполнительное устройство.
Включив последовательно с ПР1.6 ограничитель сигналов системы "Старт" ПП11.1 (на минимум), получаем регулятор релейного действия с зоной неоднозначности и возможностью ограничения позиций (прототип), который позволяет создать системы двухпозиционного регулирования улучшенного качества путем использования метода неполного притока и оттока качества путем использования метода неполного притока и оттока энергии к объекту регулирования (Кампе-Немм А.А. Автоматическое двухпозиционное регулирование. М.: Наука, 1967).
Недостатком таких систем является то, что позиции, которыми определяется величина неполного притока и оттока энергии, задаются жестко. Поэтому при изменении нагрузки объекта их необходимо пересчитывать и устанавливать каждый раз заново. Такую перенастройку еще можно осуществлять, если нагрузка объекта меняется лишь от цикла к циклу процесса и остается постоянной внутри цикла, например, при периодической технологии и практически невозможно сделать, если нагрузка меняется в ходе процесса. В этом случае, вместо ожидаемого улучшения качества регулирования, можно получить неустойчивое движение регулируемой величины, если энергии, обеспечиваемые позициями, превысят или наоборот будут меньше значения нагрузки.
Цель изобретения - улучшение качества двухпозиционного регулирования для объектов с различными значениями нагрузки, в том числе меняющимися в ходе процесса регулирования.
Сущность изобретения заключается в том, что позиции регулятора задаются не жестко, а могут автоматически адаптироваться в ходе технологического процесса с определенным шагом. В результате такой адаптации для управления объектом выбирается узкая зона энергий, большей и меньшей нагрузки и максимально приближенная к ее величине.
Блок-схема регулятора представлена на фиг. 1 и содержит: входной канал для подключения сигнала регулируемой величины Pп, выходной канал регулятора Pвых, узел сравнения 1, узел формирования зон неоднозначности 2, узел коммутации 3, узел дискретных задатчиков позиций 4, узел сравнения позиций 5, узел перемещения позиций 6, а также канал питания Pпит, соединенный с соответствующими элементами узлов 1, 2, 3, 4, 5. Принципиальные же схемы узлов даны соответственно на фиг. 2 - 7.
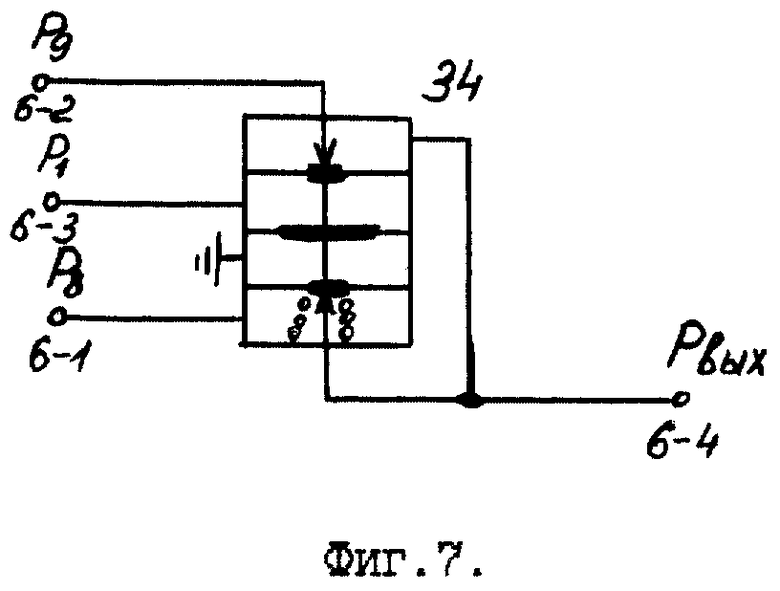
Узел сравнения 1, принципиальная схема которого приведена на фиг. 2, состоит из двух пятимембранных элементов сравнения 7 и 8, соединенных по схеме суммирования входных сигналов, задатчика 9, принципиальная схема которого приведена на фиг. 8, трехмембранного элемента сравнения 10, соединенного по схеме сравнения входных сигналов и пневмореле с пружиной 11, выполняющего роль сдвоенного клапана; узел формирования зон неоднозначности 2 (фиг. 3) состоит из семи одномембранных элементов 12 - 18 и трех постоянных дросселей 19 - 21; в узел коммутации 3 (фиг. 4) входят два элемента "И" 24 и 26, два элемента 25 и 27, реализующих операцию "ЗАПРЕТ", пневмореле с пружиной 22, реализующее операцию "ЗАПРЕТ-ИЛИ", и пневмореле с пружиной 23, реализующее операцию "И-ИЛИ"; узел дискретных задатчиков 4 (фиг. 5) состоит из двух шаговых реверсивных пневмоприводов 29 и 30 и первого и второго задатчиков верхней и нижней позиций 31, 32 (фиг. 8), регулирующие штоки которых 35 соединены жестко с валами пневмоприводов; узел сравнения позиций 5 (фиг. 6) содержит трехмембранный элемент сравнения 33, соединенный по схеме сравнения входных сигналов с заданной точностью Δ, определяемой пружиной элемента; узел переключения позиций 6 (фиг. 7) содержит пневмореле с пружиной 34, выполняющего роль сдвоенного клапана (см. выше элемент 11).
При этом узел сравнения 1 регулятора (см. фиг. 1, 2) имеет первый входной канал (1-1) с подключенным к нему задатчиком регулируемой величины 9 и соединенного с минусовыми камерами элементов 8, второй входной канал (1-2) для подключения сигнала регулируемой величины и соединенного с плюсовыми камерами элементов сравнения 7 и 10 и минусовой - элемента сравнения 8. Выходной канал 1-4 узла сравнения 1 (фиг. 2) соединен с входным каналом 2-1 узла формирования зон неоднозначности 2 (фиг. 3). Выходной канал 1-3 узла сравнения 1 (фиг. 2) соединен с входным каналом 3-1 узла коммутации 3 (фиг. 4), а также с входным каналом 6-3 узла переключения позиций 6 (фиг. 7). Выходные каналы 2-2 и 2-3 узла формирования зон неоднозначности 2 (фиг. 3) соединены с входными каналами 3-2 и 3-3 узла коммутации 3 (фиг. 4) соответственно. Выходные каналы 3-5, 3-6, 3-7, 3-8 узла коммутации 3 (фиг. 4) соединены с входными каналами 4-1, 4-2, 4-3, 4-4 узла дискретных задатчиков 4 (фиг. 5) соответственно. Выходные каналы 4-5 и 4-6 узла дискретных задатчиков 4 (фиг. 5) соединены с входными каналами 5-1 и 5-2 узла сравнения позиций 5 (фиг. 6) соответственно, а также с входными каналами 6-1 и 6-2 узла переключения позиций 6 (фиг. 7). Выходной канал 5-3 узла сравнения позиций 5 (фиг. 6) соединен с входным каналом 3-4 узла коммутации 3 (фиг. 4). Выходной канал 6-4 узла переключения позиций 6 (фиг. 7) является выходным каналом регулятора Pвых.
Узел сравнения 1 (фиг. 2) предназначен для формирования выходных сигналов: дискретного - P1 и аналогового - P'1. Для этого сигнал задатчика 9 (Pзд) поступает в глухую камеру "С"(-) пятимембранного элемента сравнения 7, выполняющего операцию сложения, а также в глухую камеру "В"(+) пятимембранного элемента сравнения 8, также выполняющего операцию сложения. Входной сигнал переменной (Pп) регулируемой величины поступает на вход элемента сравнения 7 в глухую камеру "В"(+), а также в глухую камеру "С"(-) элемента сравнения 8. Выходы элементов сравнения 7 и 8 определяют величину сигнала P'1 по каналу 1-4, который равен: для элемента 7 (при Pп > Pзд) P'1 = Pп - Pзд, для элемента 8 (при Pзд > Pп) P'1 = Pзд - Pп. Выходные сигналы элементов 7 и 8 через проточные камеры пневмореле с пружиной 11 поступают в выходной канал 1-4 (P'1) узла 1. Для формирования дискретного сигнала P1 используют трехмембранный элемент сравнения 10. Выход элемента 10 соединен с выходным каналом 1-3 узла 1, а также с глухой управляющей камерой "+" пневмореле с пружиной 11, а на его вход поступают: в "+" камеру - сигнал переменной (Pп), а в "-" камеру - сигнал задания (Pзд). Таким образом:
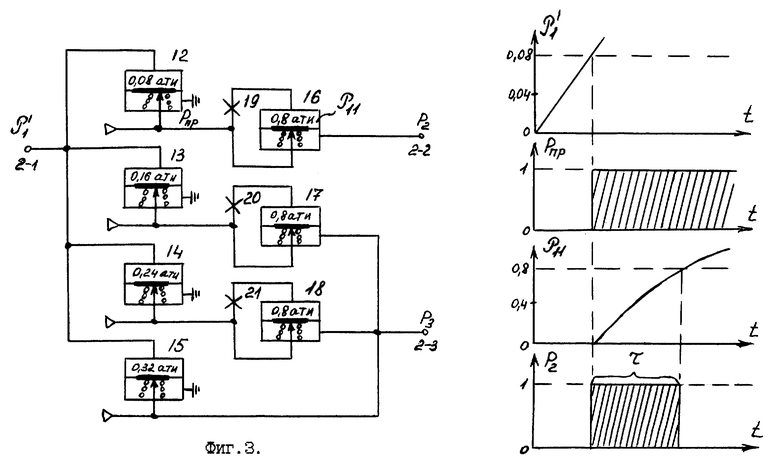
Узел формирования зон неоднозначности 2 (фиг. 3) предназначен для формирования дискретных сигналов P2 и P3. Для этого сигнал с выходного канала 1-4 (P'1) узла сравнения 1 (фиг. 2) поступает на вход 2-1 узла формирования зон неоднозначности 2 (фиг. 3). Канал 2-1 (P'1) узла 2 (фиг. 3) соединен с глухими камерами одномембранных элементов 12, 13, 14, 15 с различными условиями срабатывания. Причем:
элемент 12 срабатывает при P'1 ≥ 0,08 ати,
13 - P'1 ≥ 0,16 ати,
14 - P'1 ≥ 0,24 ати,
15 - P'1 ≥ 0,32 ати.
Входные сигналы одномембранных элементов 12, 13, 14 через постоянные дроссели соответственно 19, 20, 21 поступают в глухие камеры одномембранных элементов 16, 17, 18, а напрямую - в проточные камеры этих элементов. Условие срабатывания элементов 16, 17, 18 - 0,8 ати. Канал 2-2 (P2) узла формирования зон неоднозначности 2 (фиг. 3) является выходом элемента 16, а канал 2-3 (P3) соединен с выходами элементов 15, 17, 18. Постоянные дроссели 19, 20, 21 в совокупности с глухими камерами одномембранных элементов 16, 17, 18 соответственно представляют собой апериодические звенья. Поэтому, например, при срабатывании элемента 12 (P'1 ≥ 0,08 ати) на его входе появится сигнал (Pпр), равный "1", который будет поступать через проточную камеру элемента 16 в канал 2-2 (P2). Одновременно этот же сигнал через постоянный дроссель 19 будет поступать в глухую камеру элемента 16 (P11). При давлении P11 ≥ 0,8 (ати) в глухой камере элемента 16 произойдет срабатывание этого элемента и на его выходе появится "0". На фиг. 3 представлены графики, поясняющие порядок формирования дискретного импульсного сигнала P2. Сигнал P2 вновь может стать равным "1" только при условии, если P'1 < 0,08 (ати), а затем P'1 ≥ 0,08 (ати). Аналогично происходит формирование сигнала P3 по каналу 2-3 (P3).
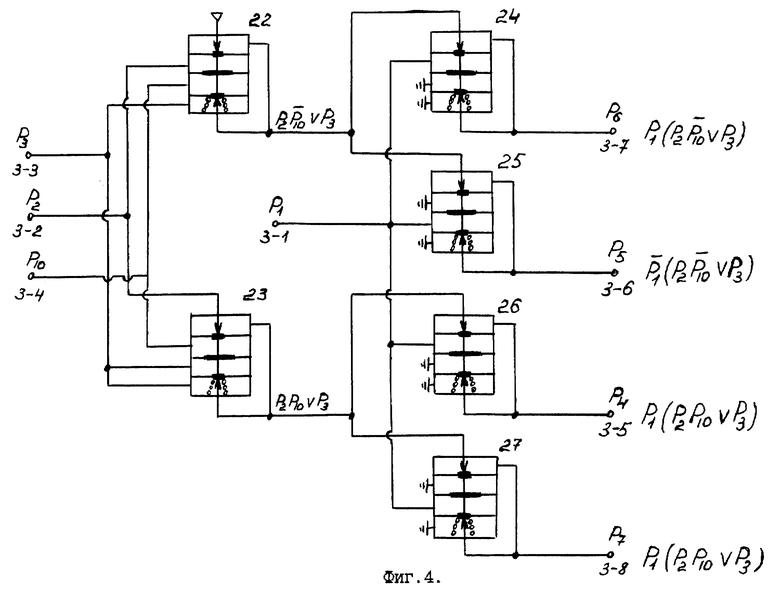
Узел коммутации 3 (фиг. 4) предназначен для формирования дискретных командных сигналов P4, P5, P6 и P7. Дискретный сигнал P1 поступает во входной канал 3-1 (P1). Два элемента "И" 24 и 26, а также два элемента 25 и 27, реализующих операцию "ЗАПРЕТ", пневмореле с пружиной 22, реализующего операцию "ЗАПРЕТ-ИЛИ", и 23, реализующего операцию "И-ИЛИ", предназначены для формирования команд P4 - P7 в функции входных сигналов, приходящих по каналам: 3-2 (P2); 3-1 (P1); 3-4 (P10); 3-3 (P3). Выходной сигнал-команда элемента "И" 24 поступает в выходной канал 3-7 (P6) узла коммутации 3 (фиг. 4). Аналогично выходные сигналы-команды элементов 25 - 27 узла коммутации 3 (фиг. 4) поступают: "И" 26 ---> 3-5 (P4); "ЗАПРЕТ" 25 ---> 3-6 (P5); "ЗАПРЕТ" 27 ---> 3-18 (P7). Выходной сигнал элемента 23 поступает в проточные камеры элементов 26 и 27; выходной сигнал элемента 22 поступает в проточные камеры элементов 24 и 25. Выходной сигнал P3 по входному каналу 3-3 узла коммутации 3 (фиг. 4) поступает во входные каналы элементов 22 и 23, аналогично P2 (3-2) ---> 22 и 23; P10 (3-4) ---> 22 и 23; P1 (3-1) ---> 24, 25, 26 и 27. При этом командные сигналы P4, P5, P6, P7 соответствуют следующим логическим условиям:
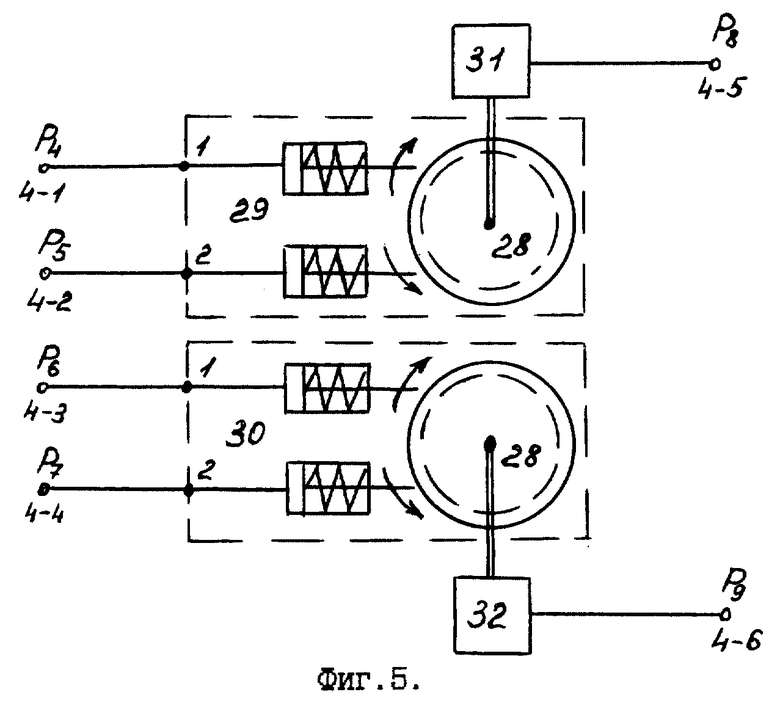
Узел дискретных задатчиков 4 (фиг. 5) предназначен для дискретного изменения верхней и нижней позиций регулятора.
В регуляторе установлены шаговые реверсивные пневмоприводы 29 и 30 с управляющими входами 4-1 (P4), 4-2 (P5) и 4-3 (P6), 4-4 (P7) соответственно. Задатчики 31 и 32 кинематически связаны с пневмоприводами 29 и 30 соответственно. Пневмопривод 29 и задатчик 31, а также 30 и 32 образуют реверсивные шаговые задатчики. Выход задатчика 31 соединен с выходным каналом 4-5 (P8), а задатчика 32 с выходным каналом 4-6 (P9) узла дискретных задатчиков 4 (фиг. 5).
Канал 4-1 (P4) предназначен для уменьшения верхней позиции;
4-2 (P5) - увеличения верхней позиции;
4-3 (P6) - уменьшения нижней позиции;
4-4 (P7) - увеличения нижней позиции.
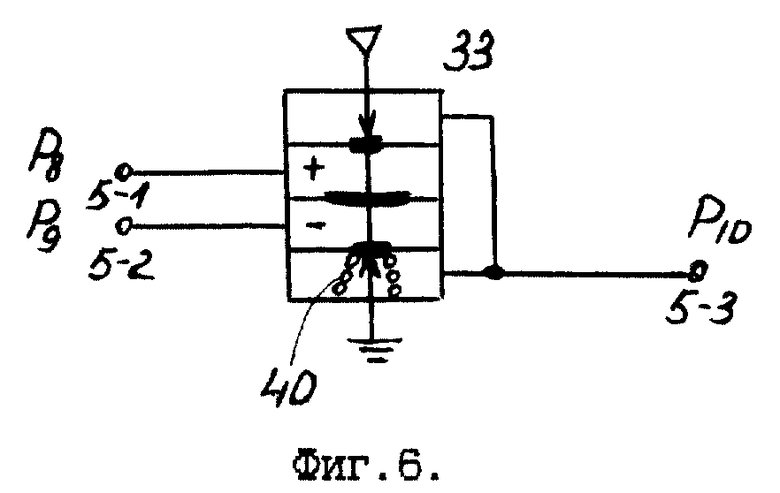
Узел сравнения позиций 5 (фиг. 6) предназначен для сравнения позиций регулятора с заданной точностью Δ, обеспечиваемой пружиной 40 элемента сравнения 33, узла дискретных задатчиков 4 (фиг. 5). Для этого входной канал 5-1 (P8) соединен с глухой камерой "+" трехмембранного элемента сравнения 33, а канал 5-2 (P9) - с глухой камерой "-". Выход элемента 33, образованный соединением сопловых камер, соединен с выходным каналом 5-3 (P10) узла сравнения позиций 5 (фиг. 6). Трехмембранный элемент сравнения 33 снабжен пружиной 40. Величина жесткости пружины 40 должна выбираться из условия, что пружина 40 обеспечивала бы давление подпора Δ, равное давлению, которое вызывается при повороте шаговых реверсивных пневмоприводов 29 и 30 узла дискретных задатчиков 4 (фиг. 5) на 0,5 шага.
Условия работы узла сравнения позиций:
Узел переключения позиций 6 (фиг. 7) предназначен для соединения выходного канала 6-4 (Pвых) то с каналом 6-1 (P8) при условии P1 = 0, то с каналом 6-2 (P9) при альтернативном условии P1 = 1. Для этого входной канал 6-3 (P1) соединен с глухой камерой "+" пневмореле с пружиной 34, выполняющего роль сдвоенного клапана (см. выше), а его проточные камеры соединены с каналами 6-1 (P8) и 6-2 (P9). Выход элемента 34 поступает на выход регулятора 6-4 (Pвых).
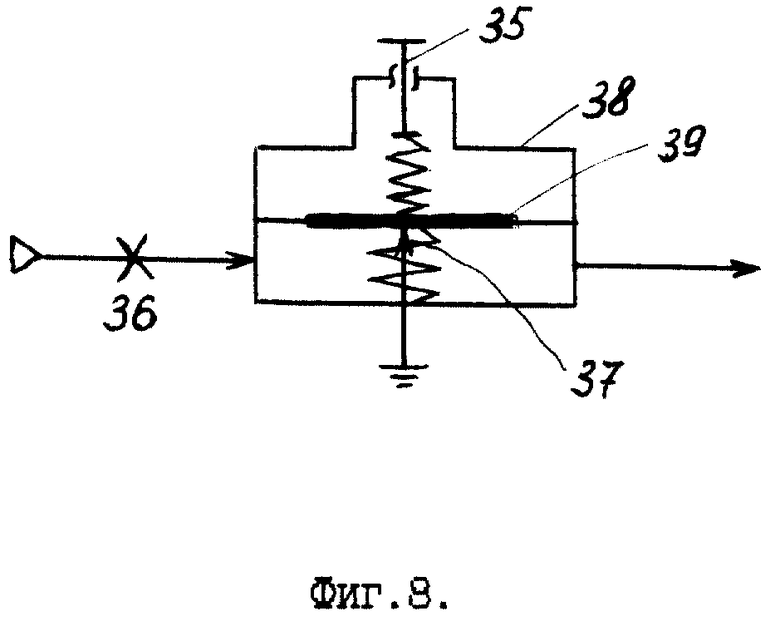
Задатчики 31, 32 и 9 (фиг. 8) выполнены в виде корпуса 38, в котором установлена подпружиненная мембрана 39 и сопло 37, сообщенное с атмосферой.
Регулятор работает следующим образом.
В узле соединения 1 (фиг. 2) происходит сложение входных сигналов Pзд (задания) и Pп (переменно-регулируемой величины). Выходной сигнал P'1 узла сравнения 1 (фиг. 2) поступает на узел формирования зон неоднозначности 2 (фиг. 3), где в зависимости от величины P'1 происходит срабатывание элементов 12, 13, 14, 15, имеющих различные условия срабатывания (см. выше), при этом формируются дискретные импульсные сигналы продолжительностью τ P2 или P3.
В зависимости от набора входных сигналов P1, P2, P3, P10, узла коммутации 3 (фиг. 4) происходит формирование выходных дискретных сигналов P4, P5, P6 и P7, являющихся командными для пневмоприводов 29 и 30 узла дискретных задатчиков 4 (фиг. 5). В зависимости от поступившего сигнала P4, P5, P6, P7 прневмопривод совершает поворот на один шаг в ту или иную сторону, т.е. можно говорить о фиксированной дискретной перенастройке сигналов позиций. Значения позиций P8, P9 сравниваются в узле сравнения 5 (фиг. 6), формируя при этом выходной сигнал P10. Переключение позиций с верхней на нижнюю или наоборот происходит за счет срабатывания элемента 34 узла переключения позиций 6 (фиг. 7), причем, если появляется сигнал P1 = 0, т.е. Pп < Pзд, то элемент 34 не срабатывает, и сигнал P8 от задатчика 31 проходит на выход, обеспечивая значение верхней позиции. В случае, если появляется сигнал P1 = 1, т. е. Pзд < Pп, то это приводит к срабатыванию элемента 34, и на выходе регулятора появляется сигнал P9 от задатчика 32, обеспечивая значение нижней позиции.
Таким образом, принцип работы регулятора и адаптации позиций заключается в следующем:
1. Выбег параметра за первую зону от задания (P'1 ≥ 0,08 ати) приводит к переключению позиций, а также к изменению одной из позиций на один шаг. Причем, если до момента переключения нижняя позиция была меньше верхней, то при переключении на верхнюю позицию и выбеге за первую зону регулируемого параметра происходит увеличение нижней позиции на один шаг, а при переключении на нижнюю позицию и последующем выбеге за первую зону происходит уменьшение верхней позиции на один шаг, т.е. позиции сближаются друг к другу. Если же до момента переключения позиции были равны или нижняя позиция была больше верхней, то при включении верхней позиции и выбеге регулируемого параметра за первую зону происходит ее увеличение на один шаг, а при включении нижней - уменьшение ее на один шаг, т.е. позиции расходятся на один шаг.
2. Выбег параметра за вторую и последующие зоны от задания (P'1 = 0,16 (0,24) (0,32) (ати)) приводит к изменению обеих позиций одновременно в сторону, способствующую уменьшению выбега, т.е. при положительном выбеге P'1 = Pп - Pзд = 0,16 (0,24) (0,32) (ати) происходит пошаговое уменьшение верхней и нижней позиций (их параллельное смещение на шаг вниз), а при отрицательном выбеге P'1 = Pзд - Pп = 0,16 (0,24) (0,32) (ати) происходит пошаговое увеличение верхней и нижней позиций, т.е. их смещение на один шаг вверх при каждом пересечении соответствующих зон. Такое изменение позиций происходит до прихода одной из них в крайнее положение, после чего изменяется лишь другая позиция в сторону сближения с первой.
В результате работы регулятора за счет перенастройки значений позиций происходит выбор оптимального значения величины притока и оттока энергии. В установившемся режиме регулятор начинает работать как двухпозиционный с фиксированными позициями, причем значения верхней и нижней позиций максимально приближены к значению заданной нагрузки объекта и отличаются друг от друга только на один шаг поворота пневмопривода. То есть можно говорить, что регулятор выбирает узкий диапазон энергий, определяемый одним поворотом пневмопривода, а внутри этого диапазона находится значение нагрузки объекта.
При изменении значения нагрузки объекта (например, при изменении задания или нанесения на объект возмущенного воздействия по нагрузке) регулятор автоматически за счет изменения величины рассогласования P'1 отработает величину выбега регулируемого параметра и перенастроиться на новый диапазон энергий.
Имея приводы с различными значениями поворота на один шаг, можно перенастраивать значения позиций оптимальным образом для любой системы регулирования.
В качестве сигналов Pп и Pзд могут быть использованы аналоговые сигналы различных измерительных приборов, например мостов или потенциометров, преобразованных в аналоговые пневмосигналы посредством электропневмопреобразователей.
Вышеописанная адаптация позиций приводит к улучшению качества регулирования со всеми вытекающими из этого экономическими аспектами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1985 |
|
SU1289244A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1988 |
|
SU1554628A1 |
| Пневматическое устройство для формирования функции переключения | 1980 |
|
SU860085A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2158435C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2129726C1 |
| Пневматический регулятор соотношения двух газовых потоков | 1988 |
|
SU1520491A1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ДОЗИРОВАНИЯ ЖИДКОСТЕЙ НА БАЗЕ МЕМБРАННОГО НАСОСА | 2016 |
|
RU2628984C1 |
| Гидростатический уровнемер | 1979 |
|
SU800661A1 |
| ПРОГРАММИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ УПРАВЛШИЯ ^^'^ ^^ ' | 1967 |
|
SU191236A1 |
| ПНЕВМАТИЧЕСКИЙ ДОЗАТОР С ОТМЕРИВАНИЕМ ДОЗЫ ПО УРОВНЮ ЖИДКОСТИ В ТАРЕ | 2020 |
|
RU2754139C1 |
Изобретение относится к техническим средствам автоматизации, а именно к пневматическим позиционным регуляторам, и может быть использовано как в промышленности, так и в быту. Технический результат - улучшение качества двухпозиционного регулирования для объектов с различными значениями нагрузки, в том числе меняющимися в ходе процесса регулирования. Достигается это тем, что позиции регулятора задаются не жестко, а могут автоматически адаптироваться в ходе технологического процесса с определенным шагом. В результате такой адаптации для управления объективом выбирается узкая зона энергий. В случае изменения нагрузки объекта регулятор автоматически способен перенастроиться к ее новому значению. В целом использование предлагаемого регулятора приводит к улучшению качества регулирования для объектов с различными значениями нагрузки по сравнению с двухпозиционным релейным регулированием. 8 ил.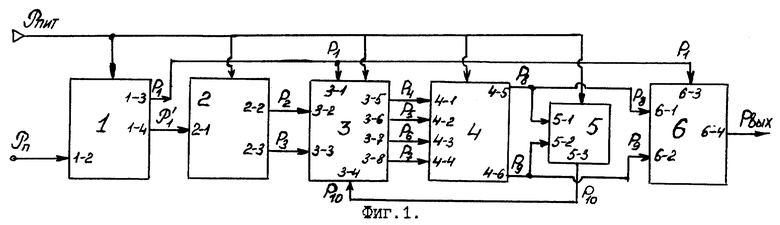
Пневматический позиционный регулятор, содержащий канал питания, выходной канал регулятора, а также первый входной канал с подключенным к нему задатчиком регулируемой величины и второй входной канал для подключения сигнала регулируемой величины, отличающийся тем, что он содержит узел сравнения, состоящий из первого и второго пятимембранных элементов сравнения, включенных по схеме суммирования входных сигналов, трехмембранного элемента сравнения, включенного по схеме сравнения входных сигналов, пневмореле с пружиной, выполняющего роль сдвоенного клапана, причем первый входной канал регулятора соединен с минусовыми камерами первого пятимембранного и трехмембранного элементов сравнения, а также с плюсовой камерой второго пятимембранного элемента сравнения, второй входной канал регулятора соединен с плюсовыми камерами первого пятимембранного и трехмембранного элементов сравнения, а также с минусовой камерой второго пятимембранного элемента сравнения, выходные каналы первого и второго пятимембранных элементов сравнения через проточные камеры пневмореле с пружиной, выполняющего роль сдвоенного клапана, соединены со вторым выходным каналом узла сравнения, выходной канал трехмембранного элемента сравнения соединен с управляющей камерой "+" пневмореле с пружиной, выполняющего роль сдвоенного клапана, а также с первым выходным каналом узла сравнения, который соединен с первым входным каналом узла коммутации и третьим входным каналом узла переключения позиций, второй выходной канал узла сравнения соединен с входным каналом узла формирования зон неоднозначности, состоящего из семи одномембранных элементов с различными условиями срабатывания и трех постоянных дросселей, причем глухие камеры первого, второго, третьего и четвертого упомянутых одномембранных элементов соединены с входным каналом узла формирования зон неоднозначности, а их проточные камеры - с каналом питания и атмосферой, выходные каналы первого, второго и третьего одномембранных элементов соединены через соответствующие постоянные дроссели с глухими камерами пятого, шестого и седьмого упомянутых одномембранных элементов, а также с их проточными камерами соответственно, выходной канал пятого одномембранного элемента соединен с первым выходным каналом узла формирования зон неоднозначности, а выходные каналы четвертого, шестого и седьмого одномембранных элементов - со вторым выходным каналом узла формирования зон неоднозначности, первый и второй выходные каналы которого соединены соответственно со вторым и третьим входными каналами узла коммутации, состоящего из первого и второго элементов И, первого и второго элементов, реализующих операцию ЗАПРЕТ, первого пневмореле с пружиной, реализующего операцию ЗАПРЕТ - ИЛИ, и второго пневмореле с пружиной, реализующего операцию И - ИЛИ, причем первая проточная камера упомянутого первого пневмореле соединена с каналом питания, его вторая проточная камера - с третьим входным каналом узла коммутации, а его первая и вторая глухие камеры соединены соответственно со вторым и четвертым входными каналами узла коммутации, соединенного также с первой глухой камерой упомянутого второго пневмореле, первая проточная камера упомянутого второго пневмореле соединена со вторым входным каналом узла коммутации, его вторая глухая и вторая проточные камеры - с третьим входным каналом узла коммутации, выходной канал первого пневмореле соединен с проточными камерами первого элемента И и первого элемента, реализующего операцию ЗАПРЕТ, выходной канал второго пневмореле соединен с проточными камерами второго элемента И и второго элемента, реализующего операцию ЗАПРЕТ, глухие камеры первого и второго элементов И и первого и второго элементов, реализующих операцию ЗАПРЕТ, соединены с первым входным каналом узла коммутации, выходные каналы первого и второго элементов И соединены соответственно с третьим и первым выходными каналами узла коммутации, выходные каналы первого и второго элементов, реализующих операцию ЗАПРЕТ, соединены со вторым и четвертым выходными каналами узла коммутации, первый, второй, третий и четвертый выходные каналы узла коммутации соединены соответственно с первым, вторым, третьим и четвертым входными каналами узла дискретных задатчиков, состоящего из двух шаговых реверсивных пневмоприводов и первого и второго задатчиков соответственно верхней и нижней позиций, причем первый и второй входные каналы первого реверсивного пневмопривода соединены с первым и вторым входными каналами узла дискретных задатчиков соответственно, первый и второй входные каналы второго пневмопривода соединены соответственно с третьим и четвертым входными каналами узла дискретных задатчиков, первый и второй реверсивные пневмоприводы кинематически связаны соответственно с первым и вторым задатчиками соответственно верхней и нижней позиций, выходы которых соединены соответственно с первым и вторым выходными каналами узла дискретных задатчиков, которые соединены соответственно с первым и вторым входными каналами узла сравнения позиций, а также с первым и вторым входными каналами узла переключения позиций, при этом узел сравнения позиций состоит из трехмембранного элемента сравнения, содержащего пружину, обеспечивающую давление подпора, равное половине давления, которое вызывается при повороте шаговых реверсивных пневмоприводов узла дискретных задатчиков на 0,5 шага, плюсовая и минусовая камеры упомянутого трехмембранного элемента сравнения соединены соответственно с первым и вторым входными каналами узла сравнения позиций, а его выходной канал соединен с выходным каналом узла сравнения позиций, выходной канал узла сравнения позиций соединен с четвертым входным каналом узла коммутации, а узел переключения позиций состоит из пневмореле с пружиной, выполняющего роль сдвоенного клапана, глухая камера которого соединена с третьим входным каналом этого узла, а первый и второй входные каналы узла переключения позиций через проточные камеры пневмореле с пружиной соединены с выходным каналом регулятора.
| КАТАЛОГ | |||
| Пневматические приборы системы "Старт", ЦНИИТЭИ приборостроения, средств автоматизации и систем управления -М.: 1973, с | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| КАТАЛОГ "Пневматические приборы системы "Старт", ЦНИИТЭИ приборостроения, средств автоматизации и систем управления | |||
| - М., 1973, с | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| КАМПЕ-НЕМ А.А., Автоматическое двухпозиционное регулирование - М.: Наука, 1967, с | |||
| Механический грохот | 1922 |
|
SU41A1 |
| В. В. Рыбальченко\ВМБЛеяОлЬйЛ | 0 |
|
SU264021A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1972 |
|
SU429414A1 |
| Пневматический двухпозиционный регулятор | 1987 |
|
SU1411706A1 |
| ДВУХПОЗИЦИОННЫЙ БЕСКОНТАКТНЫЙ РЕГУЛЯТОР | 0 |
|
SU200924A1 |
| GB 1380079 A, 08.01.75 | |||
| US 4366534 A, 28.12.1982. | |||
