Изобретение относится к области автоматического управления, а именно к двухпозиционному регулированию. Оно может быть использовано для автоматического управления процессами как в промышленности (регулирование температуры в нагревательных печах, прессах, экструдерах, регулирование уровня в кубах ректификационных колонн и т.п.), так и в быту (регулирование температуры в бытовых электронагревательных приборах).
Известен способ автоматического двухпозиционного регулирования, основанный на задании исходных крайних значений позиций регулятора U1 min и U2 max, задании номинального сигнала регулируемой величины N и переключении позиций регулятора с большей U2 на меньшую U1 или наоборот при выбеге регулируемой величины за номинальное значение сигнала N.
Недостатком такого способа является низкое качество регулирования и частое срабатывание исполнительного устройства.
Улучшить качество регулирования, а также уменьшить частоту срабатывания исполнительного устройства можно, если применить способ автоматического двухпозиционного регулирования с использованием неполного притока и(или) оттока - прототип (см., например, А.А. Камле-Немм. Автоматическое двухпозиционное регулирование. М.: Наука, 1967, с. 27, 28). Положительные эффекты в нем достигаются за счет сближения управляющих воздействий на объект, обеспечиваемых значениями позиций регулятора, с нагрузкой объекта. При этом для осуществления регулирования всегда управляющее воздействие, обеспечиваемое позицией U2 < U2 max, должно оставаться все же больше нагрузки, а меньшее, обеспечиваемое позицией U1 > U1 min, - меньше ее.
Недостатком способа-прототипа является то, что значения управляющих воздействий на объект являются фиксированными, поскольку обеспечиваются фиксированными значениями позиций регулятора, что ухудшает качество регулирования технологических величин объектов с меняющейся нагрузкой, особенно если изменение нагрузки объекта происходит в процессе регулирования. В последнем случае возможна потеря устойчивости системы, например, в случае, если нагрузка объекта станет меньше (или больше) обоих управляющих воздействий.
Цель изобретения - улучшение качества автоматического двухпозиционного регулирования объектами с меняющейся нагрузкой и уменьшение частоты срабатывания исполнительного устройства.
Цель достигается тем, что дополнительно задают сигналы задания зоны адаптации с двумя значениями, одно из которых больше номинального (N+δ), а второе - меньше номинального (N-δ) на величину δ, т.е. задают зону адаптации, равную N±δ; шаг изменения значений позиций ΔU и шаг изменения зоны адаптации 
При этом номинальное значение сигнала задания (N) используют, как и в способе-прототипе, для переключения позиций регулятора с большей (U2) на меньшую (U1) или наоборот, причем в первоначальный момент устанавливают их исходные крайние значения: максимальное - U2 max для большей и минимальное - U1 min для меньшей позиций.
Значения зоны адаптации (N±δ) используют для формирования нового значения управляющего воздействия, т.е. для его адаптации к нагрузке объекта. При этом, если регулируемая величина превысит значение N+δ и при этом включена, например, верхняя позиция регулятора U2, то значение нижней позиции U1 увеличивают на названный выше шаг ΔU, т.е. приближают к верхней позиции на один шаг, придавая ей значение U1+ΔU.
Если напротив, регулируемая величина стала меньше номинального значения сигнала задания (N) и при этом включилась нижняя позиция (U1), а затем она стала меньше N-δ, то значение верхней позиции U2 уменьшают на ту же величину ΔU, т.е. приближают к нижней позиции на один шаг и делают равным U2-ΔU.
Иначе, при выходе регулируемой величины за первую зону адаптации (N±δ) позиция, не действующая в данный момент времени на объект, адаптируется в сторону позиции, действующей на объект, т.е. изменяют ее в сторону сближения позиций.
Одновременно при выбеге регулируемой величины за первоначально задаваемую зону адаптации N±δ и проведении первой адаптации одной из позиций регулятора сработавшую зону адаптации сдвигают на величину  т.е. придают ей значение
т.е. придают ей значение  или
или  При выбеге регулируемой величины за эту новую зону действующую позицию изменяют (реадаптируют) на величину ΔU, сдвигая ее в сторону возможного крайнего значения, а другую позицию адаптируют на ΔU в ту же сторону, т.е. обе позиции одновременно сдвигают параллельно друг другу на величину ΔU. В дальнейшем этот процесс повторяется.
При выбеге регулируемой величины за эту новую зону действующую позицию изменяют (реадаптируют) на величину ΔU, сдвигая ее в сторону возможного крайнего значения, а другую позицию адаптируют на ΔU в ту же сторону, т.е. обе позиции одновременно сдвигают параллельно друг другу на величину ΔU. В дальнейшем этот процесс повторяется.
Иначе, при выходе регулируемой величины на зону адаптации (N±δ) производят изменение самой зоны адаптации на один шаг в сторону ее расширения. Если регулируемая величина продолжает изменяться в сторону следующего значения зоны адаптации и превысит значение N+2δ (здесь и далее для простоты принято, что  ) или станет меньше N-2δ, то и меньшую (U1), и большую (U2) позиции регулятора одновременно изменяют (увеличивают или уменьшают) на один шаг в сторону возможного крайнего значения действующей позиции с целью большей компенсации выбега регулируемой величины, т.е. придают им значения U1+ΔU; U2+UΔ или U1-UΔ; U2-UΔ. При этом одновременно снова изменяют и зону адаптации на величину δ, придавая ей значение N+3δ или N-3δ. В случае, если регулируемая величина продолжает изменяться в сторону нового значения зоны адаптации и превысит значение N+3δ или станет меньше N-3δ, то процесс изменения управляющих воздействий и зоны адаптации повторяют. Возврат зоны адаптации к ее исходному значению N±δ осуществляют при переходе регулируемого параметра через N.
) или станет меньше N-2δ, то и меньшую (U1), и большую (U2) позиции регулятора одновременно изменяют (увеличивают или уменьшают) на один шаг в сторону возможного крайнего значения действующей позиции с целью большей компенсации выбега регулируемой величины, т.е. придают им значения U1+ΔU; U2+UΔ или U1-UΔ; U2-UΔ. При этом одновременно снова изменяют и зону адаптации на величину δ, придавая ей значение N+3δ или N-3δ. В случае, если регулируемая величина продолжает изменяться в сторону нового значения зоны адаптации и превысит значение N+3δ или станет меньше N-3δ, то процесс изменения управляющих воздействий и зоны адаптации повторяют. Возврат зоны адаптации к ее исходному значению N±δ осуществляют при переходе регулируемого параметра через N.
Иначе, при выбеге регулируемой величины за значение зоны адаптации, равное N±2δ, и последующий значений за N±nδ производят одновременное изменение обеих позиций регулятора на один шаг в сторону компенсации выбега регулируемой величины действующей позицией регулятора, а также производят изменение зоны адаптации на величину δ.
Однако при таком способе регулирования возможен случай, когда позиции регулятора могут "перехлестнуться", т.е. значение нижней позиции станет больше значения верхней позиции регулятора (U1 > U2). Во избежание этого значения позиций регулятора постоянно сравнивают и в случае их "перехлеста" и выбега регулируемого параметра за N±nδ действующее значение позиции изменяют на величину ΔU в сторону расширения позиций регулятора (т.е. верхнюю - увеличивают или нижнюю - уменьшают).
На чертеже приведена блок-схема системы регулирования, реализующая данный способ автоматического двухпозиционного регулирования.
Система состоит из адаптивного двухпозиционного регулятора I и объекта регулирования II с меняющейся нагрузкой F.
Регулятор содержит шесть элементов сравнения 1-6 с пороговыми элементами, формирующих дискретные управляющие сигналы X1; X2; X'2; X3 - Xn; X'3 - X'n; Xk, релейный элемент 7 с изменяющимися значениями верхней (U2) и нижней (U1) позиций, крайние значения которых могут достигать, соответственно, значений U2 max и U1 min, управляющие элементы 8; 9 и 10, образующие блок управления III, два элемента суммирования 11 и 12, выходной управляющий канал U и четыре входных канала для задания сигналов задания регулируемой величины: Yзд = N; N+δ; N-δ и шага изменения зоны адаптации 
Командный сигнал X1 управляет переключением позиций с U1 на U2 или наоборот и приводит значение зоны адаптации к ее исходному значению N±δ. Сигнал X2 через элемент 8 осуществляет перенастройку U2 (верхней позиции регулятора) в сторону ее сближения с U1. Сигнал X'2 через элемент 8 осуществляет перенастройку U1 (нижней позиции) в сторону ее сближения с U2. Сигналы X3 - Xn осуществляют перенастройку верхней и нижней позиций регулятора одновременно в сторону их увеличения, а также являются командными сигналами для элемента суммирования 11, т.е. осуществляют увеличение задания зоны адаптации. Сигналы X'3 - X'n осуществляют перенастройку обеих позиций регулятора одновременно в сторону их уменьшения, а также уменьшение задания зоны адаптации через элемент 12. Командный сигнала Xk через элемент 10 осуществляет перенастройку действующей позиции регулятора в сторону расширения позиций при условии, если U1 > U2 и выбег регулируемой величины превысит значение зоны адаптации N±nδ. Элемент 11 предназначен для формирования верхнего значения зоны адаптации, т.е. сигналов N+2δ - N+nδ. Элемент 12 предназначен для формирования нижнего значения зоны адаптации, т.е. сигналов N-2δ - N-nδ.
Автоматически перенастраивая значения позиций U2 и U1 и зону адаптации N±δ по вышеприведенным принципам, удается с большим эффектом, чем в способе-прототипе, компенсировать изменение нагрузки F, влияющее на качество переходного процесса, и тем самым улучшить последнее.
Одновременно при предложенном способе уменьшается частота срабатывания исполнительного устройства.
В настоящее время разрабатывается ряд устройств-регуляторов, работающих по данному способу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2144690C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2158435C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2129726C1 |
| СПОСОБ РЕАЛИЗАЦИИ ТРЕХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2001 |
|
RU2220432C2 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2153696C2 |
| СИСТЕМА АДАПТИВНОГО ДВУХПОЗИЦИОННОГО УПРАВЛЕНИЯ | 2010 |
|
RU2430398C1 |
| ДВУХПОЗИЦИОННЫЙ АДАПТИВНЫЙ ЭЛЕКТРОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2138071C1 |
| СПОСОБ РЕАЛИЗАЦИИ ДВУХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2007 |
|
RU2362198C1 |
| СПОСОБ АДАПТИВНОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2498386C1 |
| СПОСОБ АДАПТИВНОГО ТРЕХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2474856C1 |
Изобретение относится к области автоматического управления, а именно к двухпозиционному регулированию, и может быть использовано как в промышленности, так и в бытовой технике. Технический результат - улучшение качества регулирования путем сокращения времени адаптации позиций регулятора к нагрузке объекта. Достигается за счет того, что процесс адаптации и реадаптации делается не однократным, а многократным благодаря введению подстраивающейся (адаптирующейся) зоны адаптации. 1 ил.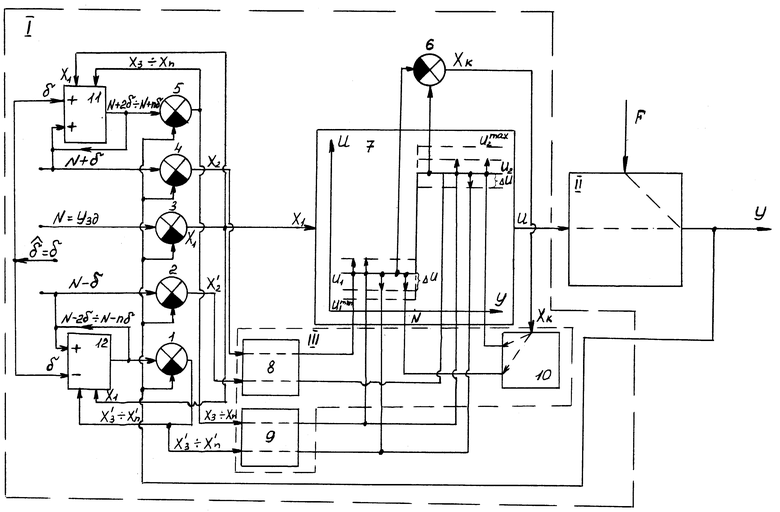
Способ автоматического двухпозиционного регулирования, основанный на задании исходных крайних значений позиций регулятора U1 min и U2 max, задании номинального значения сигнала регулируемой величины N и переключении позиций регулятора с большей U2 на меньшую U1 или наоборот при выбеге регулируемой величины за номинальное значение сигнала N, отличающийся тем, что дополнительно задают сигналы задания зоны адаптации с двумя значениями, одно из которых больше номинального, а второе - меньше на величину δ, шаг изменения значений позиций ΔV и шаг изменения зоны адаптации  при выбеге сигнала регулируемой величины за сигналы задания зоны адаптации N ± δ, изменяют значение позиции регулятора, не воздействующей в данный момент на объект регулирования, на шаг ΔU в сторону сближения со значением позиции действующей на объект регулирования, одновременно изменяют значение зоны адаптации, за которую произошел выбег, на шаг изменения зоны адаптации
при выбеге сигнала регулируемой величины за сигналы задания зоны адаптации N ± δ, изменяют значение позиции регулятора, не воздействующей в данный момент на объект регулирования, на шаг ΔU в сторону сближения со значением позиции действующей на объект регулирования, одновременно изменяют значение зоны адаптации, за которую произошел выбег, на шаг изменения зоны адаптации  в сторону ее расширения, а при выбеге регулируемой величины за новое значение зоны адаптации производят одновременное изменение обеих позиций регулятора на один шаг ΔU в сторону исходного крайнего значения действующей позиции регулятора, а также производят вновь изменение зоны адаптации, за которую произошел выбег, на величину
в сторону ее расширения, а при выбеге регулируемой величины за новое значение зоны адаптации производят одновременное изменение обеих позиций регулятора на один шаг ΔU в сторону исходного крайнего значения действующей позиции регулятора, а также производят вновь изменение зоны адаптации, за которую произошел выбег, на величину  в сторону ее расширения и производят возврат зоны адаптации к ее ранее упомянутым заданным значениям N ± δ при переходе регулируемой величины через номинальное значение сигнала задания N, кроме того, все время производят сравнение значений позиций регулятора и в случае их "перехлеста", т.е. при U1 > U2, изменяют действующую позицию на шаг ΔU в сторону ее исходного крайнего значения.
в сторону ее расширения и производят возврат зоны адаптации к ее ранее упомянутым заданным значениям N ± δ при переходе регулируемой величины через номинальное значение сигнала задания N, кроме того, все время производят сравнение значений позиций регулятора и в случае их "перехлеста", т.е. при U1 > U2, изменяют действующую позицию на шаг ΔU в сторону ее исходного крайнего значения.
| КАМПЕ-НЕММ А.А | |||
| Автоматическое двухпозиционное регулирование | |||
| - М.: Наука, 1967, с.27 - 28 | |||
| КЛЮЕВ А.С | |||
| Двухпозиционные регуляторы и их настройка | |||
| - М.: Энергия, 1967 | |||
| В. В. Рыбальченко\ВМБЛеяОлЬйЛ | 0 |
|
SU264021A1 |
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2047210C1 |
| US 3546559 A, 08.12.1970 | |||
| Пуговица | 0 |
|
SU83A1 |
